基于自适应神经模糊的磁流变阻尼器非参数化建模
2011-09-17周忠永
郑 玲, 周忠永
(重庆大学 机械传动国家重点实验室,重庆 400030)
磁流变阻尼器是一种新型智能振动控制装置。它应用磁流变液在磁场作用下的快速可逆流变特性,可以实时调整阻尼参数,而且能耗低,温度稳定性好,正日益受到工程界的广泛重视[1]。
根据磁流变液的流变学特性,磁流变液在磁场作用下呈非牛顿流体,磁流变阻尼器阻尼力与速度之间表现出复杂的非线性磁滞特性。建立准确的磁流变阻尼器模型,对提高磁流变减振系统的控制精度,具有重要的理论意义和工程应用价值。
由于磁流变液的动态本构关系十分复杂,应用流变力学理论分析阻尼器的阻尼特性极为复杂和困难,这给准确建立磁流变阻尼器的数学模型带来了一定难度[2]。许多专家学者对模型进行了大量的研究,主要包括参数化模型和非参数化模型两大类。
Stanway等[3]建立了磁流变阻尼器的 Bingham模型,该模型能很好地描述磁流变阻尼器阻尼力的时域特性及阻尼力与位移的关系特性,但无法表示在速度较小的区域内阻尼力与速度的关系。Spencer等[4]提出了修正的Bouc-Wen模型,该模型形式如下:

其中,模型中的参数与施加电压的关系如下:
该模型为典型的参数化模型,它能较好地反映阻尼器的力-位移特性,也能较好地描述磁流变阻尼器的非线性行为。但模型中有14个参数需要优化辨识,且引入了两个不可观测的变量。这给模型参数辨识带来比较大的困难。此外,由于模型复杂,在实际应用过程中,还会导致减振系统控制实时性降低,时滞增大,稳定性下降。
汪小华等[5]采用模糊逻辑理论,对磁流变液阻尼器进行了非参数化建模,该模型具有较高的精度,计算简便。但该模型只针对单一电压情况下的阻尼力进行模糊建模,没有考虑到电压变化对阻尼力的影响。Schurter等[6]采用模糊自适应理论建立了磁流变阻尼器模型。该模型将磁流变阻尼器的位移,速度以及控制电压作为模型的输入,将阻尼力作为输出。该模型很好地描述了磁流变阻尼器的滞回特性,但模型的结构比较复杂,输入模糊隶属度函数个数太多,容易出现维数灾难。Kyoung等人[7]也建立了一种磁流变阻尼器的模糊自适应非参数化模型。该模型包括一个神经模糊部分和一个模糊逻辑部分。其中神经模糊部分用来描述活塞杆速度和位移对阻尼力的影响,而模糊逻辑部分用来描述控制电压与阻尼力的关系。该模型很好的描述了磁流变阻尼器的非线性特性,精度也较高,但模糊逻辑部分的控制规则较难以确定。
本文针对磁流变阻尼器的高度非线性特性,避免进行大量的参数辨识,提出了基于自适应神经模糊推理的磁流变阻尼器非参数化模型。这种非参数化模型兼具神经网络和模糊逻辑的优点,能根据训练数据自动确定复杂的模型结构和参数包括网络结构、隶属度函数和模糊规则等。神经网络和模糊逻辑的强大非线性学习和知识表达能力,证明能以任意精度逼近连续非线性函数[6,8]。
1 非参数化模型
针对美国Lord公司RD-1005型磁流变阻尼器,建立基于神经网络和模糊逻辑推理的磁流变阻尼器非参数化模型。文献[9] 对该型号的阻尼器进行了详细的试验研究,经过系统辨识和参数最优化建立了输入与输出的非线性关系:

式中:
f0为偏执力;Cb为滞回曲线的斜率影响系数;fy,k为最大阻尼力的影响系数;Cw为滞回曲线宽度的影响系数,v为介于0 ~7.5 V间的控制电压。
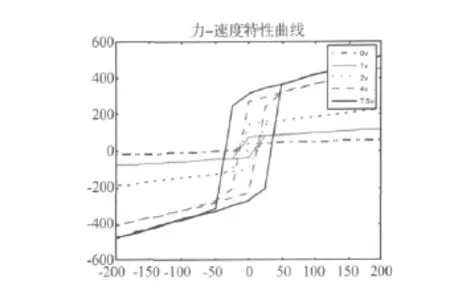
图1 RD-1005磁流变阻尼器速度特性曲线Fig.1 Speed characteristic curve of RD-1005 MR damper
磁流变阻尼器阻尼力与速度之间的非线性关系由上述参数来决定,相对于Spencer模型,该参数化模型比较简单,其阻尼力-速度特性曲线见图1所示。输入电压分别为 0 V,1 V,2 V,4 V,7.5 V。本文以上述模型为参考,建立基于神经网络和模糊逻辑的磁流变阻尼器非参数化模型。
1.1 非参数化模型结构
由上述分析可知:磁流变阻尼器的阻尼力与活塞杆的速度,加速度以及施加给阻尼器的控制电压有关。据此,建立磁流变阻尼器非参数化模型结构:
自适应神经模糊系统Ⅰ:描述特定电压下,阻尼力与活塞杆速度和加速度之间的非线性关系;
自适应神经模糊系统Ⅱ:确定不同电压情况下,阻尼力输出等级K。
因此,非参数化模型的阻尼力F为电压决定的输出等级K与活塞杆速度和加速度决定的阻尼力f的乘积。即:
模型结构见图2所示。
1.2 自适应神经模糊系统
自适应神经模糊系统,是把神经网络理论和T-S模糊推理结合在一起的一个系统,它可以根据大量训练数据,利用自适应的神经网络建立起模糊推理系统[10,11]。自适应神经模糊推理系统(ANFIS)用已被理论证明具有能在致密集内以任意精度逼近连续非线性函数能力的T-S模糊逻辑系统来表达非线性函数,建立辨识模型:
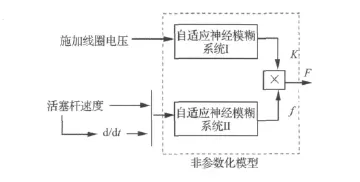
图2 基于自适应神经模糊系统非参数化模型结构Fig.2 Non-parametric model structure based on adaptive neuro-fuzzy
规则 i∶如果 x1=Ai1且 x2=Ai2且 xn=Ain则:

其中:x1,x2,…,xn是输入变量,Ai1,Ai2,…,Ain是模糊集合,y为输出变量,是一阶精确函数。
该模糊模型的输入是模糊的,输出是精确的,仅需加权平均即可得到模糊系统的总输出,从而避免解模糊过程。T-S型模糊系统便于参数化,可以等效成参数可调的自适应神经网络系统,常称为自适应神经模糊推理系统[12](ANFIS)。自适应神经模糊推理系统的结构如图3所示。
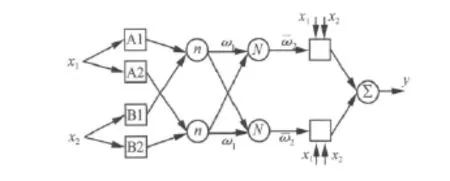
图3 典型ANFIS系统结构图Fig.3 System structure of class ANFIS
第一层:该层每个节点i是以节点函数表示的方形节点:

其中,x1(或 x2)为节点 i的输入,Ai(或 B(i-2))是与该节点函数值相关的语言变量,如“大”或“小”等。或者说O1,i是模糊集 A的隶属函数,通常可以选用钟形函数。
第二层:该层的节点在图3中用П表示,将输入信号相乘,而将其乘积输出为

第三层:该层的节点在图3中用N表示,第i个节点计算第i条规则的wi与全部规则w值之和的比值为:

第四层:该层每个节点为自适应节点,其输出为:

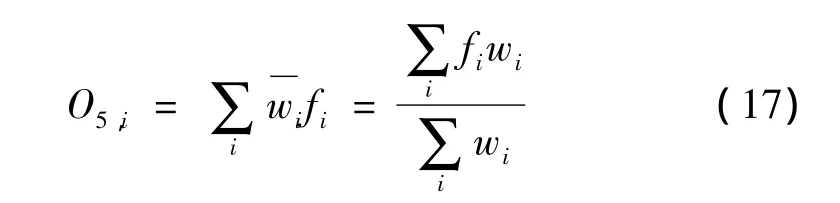
第五层:该层的单节点是一个固定节点,计算所有输入信号的总输出为:
1.2.1 自适应神经模糊系统Ⅰ
自适应神经模糊系统Ⅰ是一个单输入单输出系统,可以根据输入的控制电压 的值智能地选择磁流变阻尼器输出阻尼力的等级K。输入电压信号范围为0 ~7.5 V,输入量的模糊语言集合为{z,s,b}。根据RD-1005磁流变阻尼器速度特性曲线,利用神经网络理论自动建立T-S型模糊系统。
首先建立初始的模糊结构,然后通过神经网络算法中的混合算法训练初始的模糊结构,调整自适应神经模糊系统的参数,最终确定训练好的自适应神经模糊系统。由此得到自适应模糊神经系统对训练数据的逼近结构。网络的训练算法采用BP算法和最小二乘的混合算法来实现。为了测试自适应神经模糊系统的逼近精度,用检测数据对训练好的自适应神经模糊系统进行测试,从而得到自适应神经模糊系统对于检测数据的模糊逼近。图4所示为训练后的神经网络模糊系统结构图:
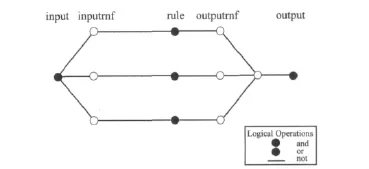
图4 训练后自适应神经模糊系统Ⅰ结构Fig.4 Structure of ANFIS Ⅰ after training
1.2.2 自适应神经模糊系统Ⅱ
自适应神经模糊系统Ⅱ主要是建立磁流变阻尼器阻尼力与活塞杆速度和加速度的关系。将其设计为两输入单输出系统,活塞杆的速度和加速度为输入变量,磁流变阻尼器的阻尼力为输出变量。
为了便于研究,两个输入变量的模糊语言集合均为{zb,ze,pb},隶属度函数均为广义钟形隶属度函数。钟形函数的表达式如下:

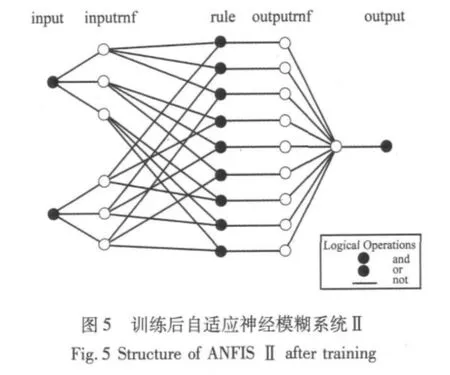
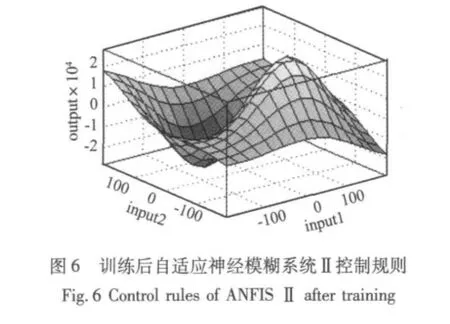
经过神经网络训练之后可得到神经网络模糊系统Ⅱ,见图5所示。由图6模糊控制规则曲面图,可以看出经过神经网络训练形成的曲面变得更加连续、平滑。
2 仿真结果与分析
将两个自适应神经模糊子系统组合在一起,构成磁流变阻尼器非参数化模型。模型选取活塞杆的运动速度、加速度以及施加电压为输入变量,磁流变阻尼器的阻尼力为输出变量。
为了评价非参数化模型的逼近精度,建立如下指标[13]:
式中,E为非参数化模型的相对逼近精度,n为离散点数,f(tk)为磁流变阻尼器的理论输出力为模糊逼近所得的估计输出力。
图7~图10是不同电压条件下,非参数化模型与参考模型的速度特性曲线对比图。图11~图14是不同电压条件下,非参数化模型与参考模型的阻尼力-位移特性曲线对比图。
通过对比可以看出,本文提出的基于自适应神经模糊理论的非参数化模型能够很好的逼近参考模型。特别是在小速度范围内,有很好的逼近精度,真实的反映了磁流变阻尼器的滞回非线性特性。只是在滞回曲线的拐点处,吻合程度稍差一些,但差别比较小。
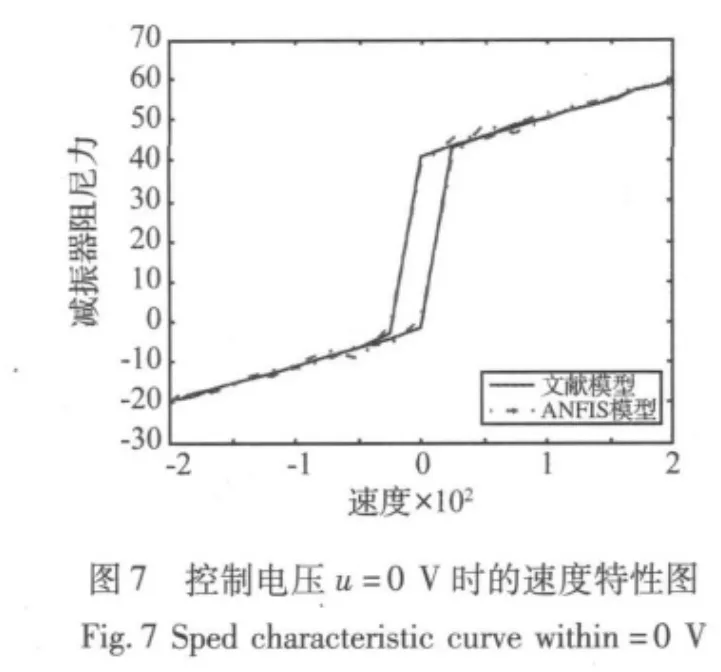

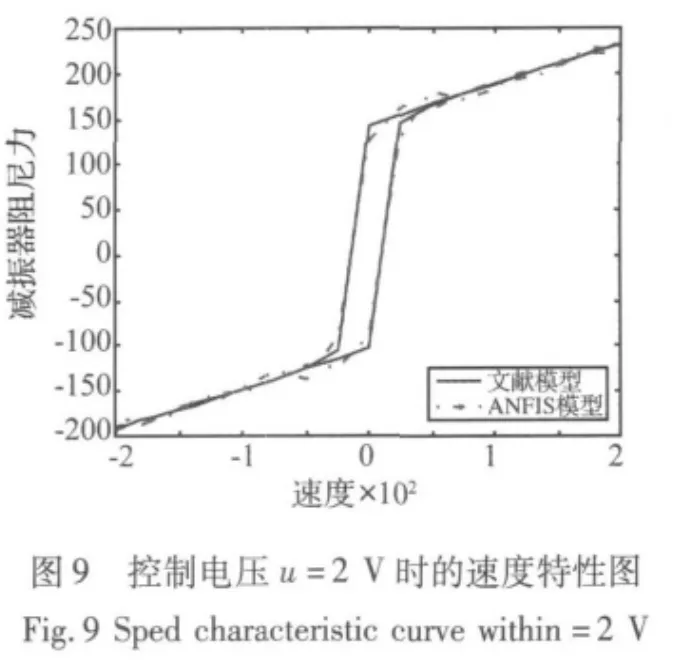

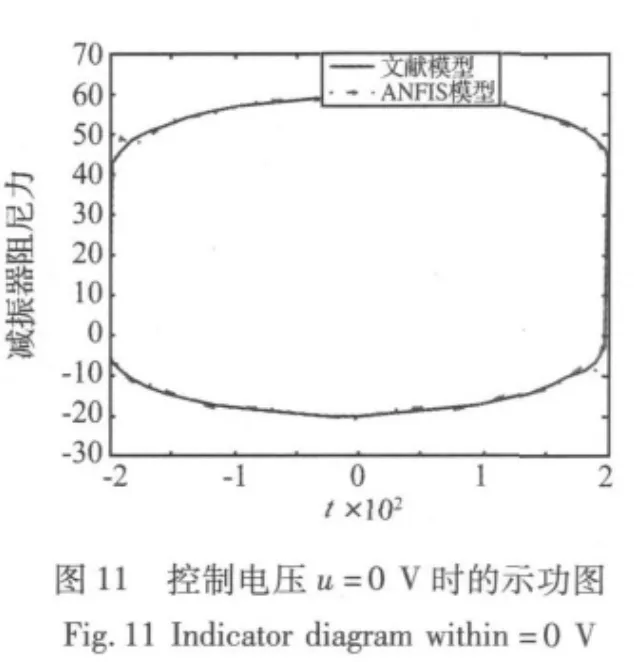

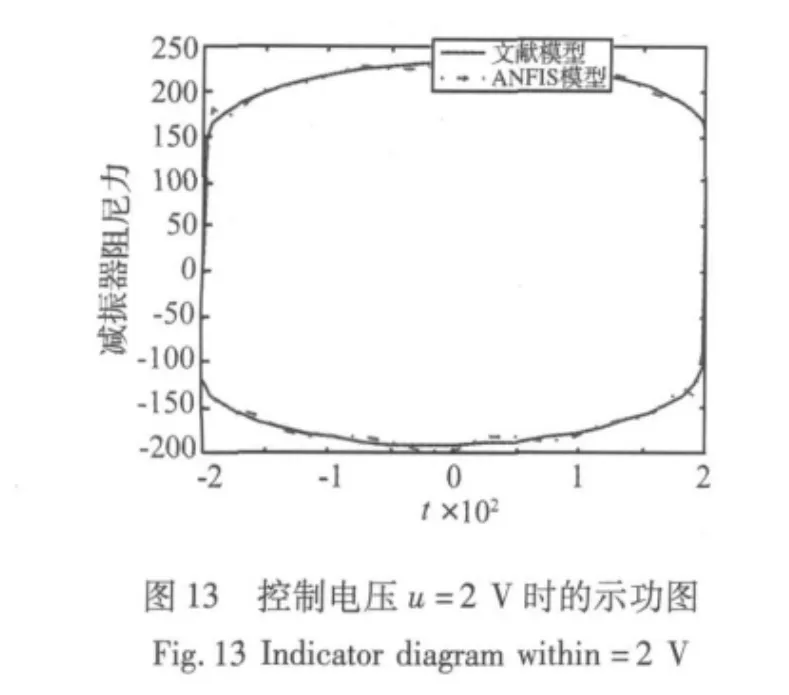


表1 非参数化模型的逼近精度Tab.1 Approximation accuracy of non-parametric model
表1给出了不同电压下,采用公式(19)计算的非参数化模型逼近精度,误差控制在3%以内,表明该非参数化模型可以高精度逼近磁流变阻尼器的输出阻尼力,从而能有效改善磁流变减振系统的控制准确性。此外,由于非参数化模型结构简单,拟合结果平滑,相比复杂的参数化模型,在控制系统设计与实现过程中将显示出更大的优势。
3 结论
本文根据RD-1005磁流变阻尼器的实验模型,建立了基于自适应神经模糊系统的磁流变阻尼器非参数化模型。相比参数化模型,它不仅避免了建模过程中的大量参数辨识,而且,能以很高的逼近精度,准确描述磁流变阻尼器的非线性滞回特性。作为一种黑箱建模方法,它不需要了解磁流变阻尼器的具体结构,只需根据试验数据,对非参数化模型进行训练,具有普遍适应性。
由于神经模糊理论具有一定的自适应能力,同时根据经验来确定隶属函数的形式,可使计算过程得到很大简化,更容易快速获得较为精确的磁流变阻尼器模型。更重要的是,这种基于自适应神经模糊理论的非参数化模型,计算速度比同样精度的参数化模型要快得多,计算时间缩短有利于磁流变减振系统在控制过程中提高响应速度,改善控制品质,保持良好的控制稳定性。
[1] 王 影,贾启芬,刘习军.磁流变阻尼器的力学模型[J] .机床与液压,2005,(3):70-73.
[2] 禹见达,陈正清,王修勇,等.磁流变阻尼器的非线性参数模型[J] .振动与冲击,2007,26(4):14-17.
[3] Stanway R,Sproston J L,Stevens N G.Non-linear modeling of an electro-rheological vibration damper[J] .Journal of Electrostatics,1987,20:167 -184.
[4] Spencer B F,Dyke SJ,Sain M K,et al.Phenomenological model for magneto-rheological dampers[J] .Journal of Engineering Mechanics,1997,123(3):230 -238.
[5] 汪小华,张培强.磁流变液阻尼器的模糊逻辑非参数化建模[J] .中国科学技术大学学报,2000,30(2):218-222.
[6] Schuler K C,Roschke P N.Fuzzy modeling of a magnetorheological damper using ANFIS[C] //.Proceedings of 9th IEEE International Conference on Fuzzy Systems,San Antonio,TX,2000,1:122-127.
[7] Ahn K K,Truong D Q,Islam M A.Modeling of a magnetorheological(MR)fluid damper using a self tuning fuzzy mechanism [J] .Journal of Mechanical Science and Technology,2009,23:1485-1499.
[8] Jang J S,Sun C T,Mizutani E.Neuro-fuzzy and soft computing:a computational approach to learning and machine intelligence[M] .Prentice Hall,Inc.,Upper Saddle River,NJ,1997.
[9] 翁建生,胡海岩.磁流变阻尼器的实验模型[J] .振动工程学报,2000,13(4):616-621.
[10] 李国勇.神经模糊控制理论及应用[M] .北京:电子工业出版社,2009.
[11] 石辛民,郝整清.模糊控制及其MATLAB仿真[M] .北京:清华大学出版社,2008.
[12] 吴晓莉,林哲辉.MATLAB辅助模糊系统设计[M] .西安:西安电子科技大学出版社,2002.
[13] 王 昊,胡海岩.磁流变阻尼器的模糊逼近[J] .振动工程学报,2006,19(1):31-36.