虚拟正骨手法中多传感器信息融合算法研究
2011-09-13宋晓瑞张俊忠
曹 慧,宋晓瑞,邱 鹏,张俊忠
(山东中医药大学理工学院,山东济南250355)
研究简报
虚拟正骨手法中多传感器信息融合算法研究
曹 慧,宋晓瑞,邱 鹏,张俊忠
(山东中医药大学理工学院,山东济南250355)
针对目前中医正骨手法的科学化、客观化的发展趋势,主要运用扩展卡尔曼滤波算法,分析在虚拟环境下中医正骨手法中骨折远端的位置、位移以及骨折远端相对移位生理角度等物理量,进行了虚拟正骨手法中目标模型的轨迹模拟,为中医正骨手法提供了1种实用的、可记录的研究平台
信息融合;扩展卡尔曼滤波;虚拟现实;正骨手法
中医正骨手法是我国传统医学的重要组成部分,在长期的医疗实践中,形成了1套独特的理论体系和完整的治疗原则及方法,以“不开刀、痛苦轻、康复快、花费少”的特色,治疗骨折、关节脱臼等骨伤疾病。但是,在治疗过程中不能观察到骨折部位的变化情况,不易开展直观的传承及训练,因此正骨手法的科学化、客观化成了现代中医的发展趋势。随着现代传感器技术、电子技术、计算机技术的飞速发展使得对正骨手法中骨折远端的位置和位移、医生手法中施力的大小和方向、骨折远端相对移位生理角度等物理量的分析成为可能。
目前,多传感器的数据融合技术作为1种交叉性极强的科学,几乎与当今所有新的研究方向都有交叠,并融会了这些研究领域最新的科研成果,成为近些年来国内外技术研究的热点[1-2]。本文的目的是结合先进的多传感器技术,将正骨手法复位运动状态的多种物理量利用多传感器资源对信息源依据某种优化准则组合起来进行数据融合,再通过数据信息采集系统传输给数据分析平台进行正骨手法的力、位置、角度等物理量的数据分析,实现虚拟正骨手法目标模型的轨迹模拟。
1 正骨手法过程示意
正骨手法复位以上肢为例进行骨伤复位模拟,中医正骨手法复位以“摸、接、端、提、推、拿、按、摩”八法为要旨[3],手法复位力学分析过程见图1。
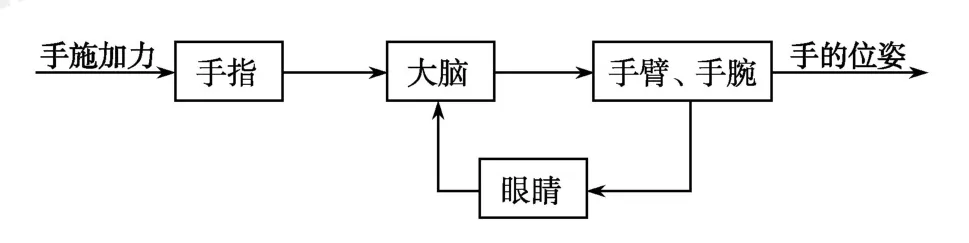
图1 手法复位过程示意图Fig.1 The procedure of reduction manipulative
正骨手法技术很大程度取决于医生对患肢施加力的把握程度上,从力学角度讲获取手法过程中力的大小、方向,上肢模型运动的位移、速度及运动的轨迹等物理量,才能更好的模拟手法。由于其信息源是相当丰富的,在工程上很难用1个传感器代替手来获取所有的信息,这就需要多种不同的传感器进行信息采集,合理的布置传感器,全面了解上肢模型的运动轨迹,获取施展手法过程中的定位精度则是关键。
2 关键技术分析
多传感器信息融合是1个新兴的研究领域,是针对1个系统使用多种传感器这一特定问题而展开的1种关于信息处理的研究。多传感器信息融合实际上是对人脑综合处理复杂问题的1种功能模拟,它的基本原理就是充分利用多个传感器资源,对各种传感器及其观测信息的合理支配与使用,将各种传感器在空间和时间上的互补与冗余信息依据某种优化准则组合起来,产生对观测环境的一致性解释和描述。其工作过程见图2。
多传感器信息融合的关键技术是数据转换、数据相关技术、态势数据库、融合推理和融合损失等[3],核心问题是选择合适的融合算法,典型的算法包括加权平均、卡尔曼滤波、贝叶斯估计、统计决策理论及神经网络方法等,其中扩展卡尔曼滤波适合应用于融合低层的实时动态多传感器冗余数据,同时该融合算法简单、稳定、所需融合输入较少的特点,使该算法在实际中的应用成为可能。
多传感器对正骨手法信息量进行信息融合的研究对象是各类传感器提供的信息,这些信息必须以信号、波形或数据等形式给出,传感器本身对数据融合系统是非常重要的[4],是正骨手法信息采集系统最关键的组成部分,是该系统的信息来源。位移传感器、位置传感器、压力传感器及角度传感器等是正骨手法信息采集的信息源,其中各种传感器的互补特性为获得更多的信息提供了技术支撑。从图2中可以看出,消除噪声与干扰实现对观测目标或者实体的连续跟踪和测量,并对其属性进行识别,分析上肢骨模型的位置,提供手术医生的手法等一系列多层次的处理,是多传感器信息进行处理的最关键技术。

图2 信息融合过程Fig.2 The process of information fusion
3 信息融合算法应用
3.1 融合结构
为了获取更精确的正骨手法源信息,本融合结构采用分布反馈式融合见图3。该融合结构的每个传感器的检测报告在进入融合以前,先由它自己的数据处理器产生局部多目标跟踪,然后把处理过的信息送至融合中心。分布反馈式融合结构的通信开销小,所需的存储容量小,速度快等优点,满足了实验条件所需。此外,由融合中心到每个传感器的反馈通道可以有助于提高各个传感器状态估计和预测的精度。
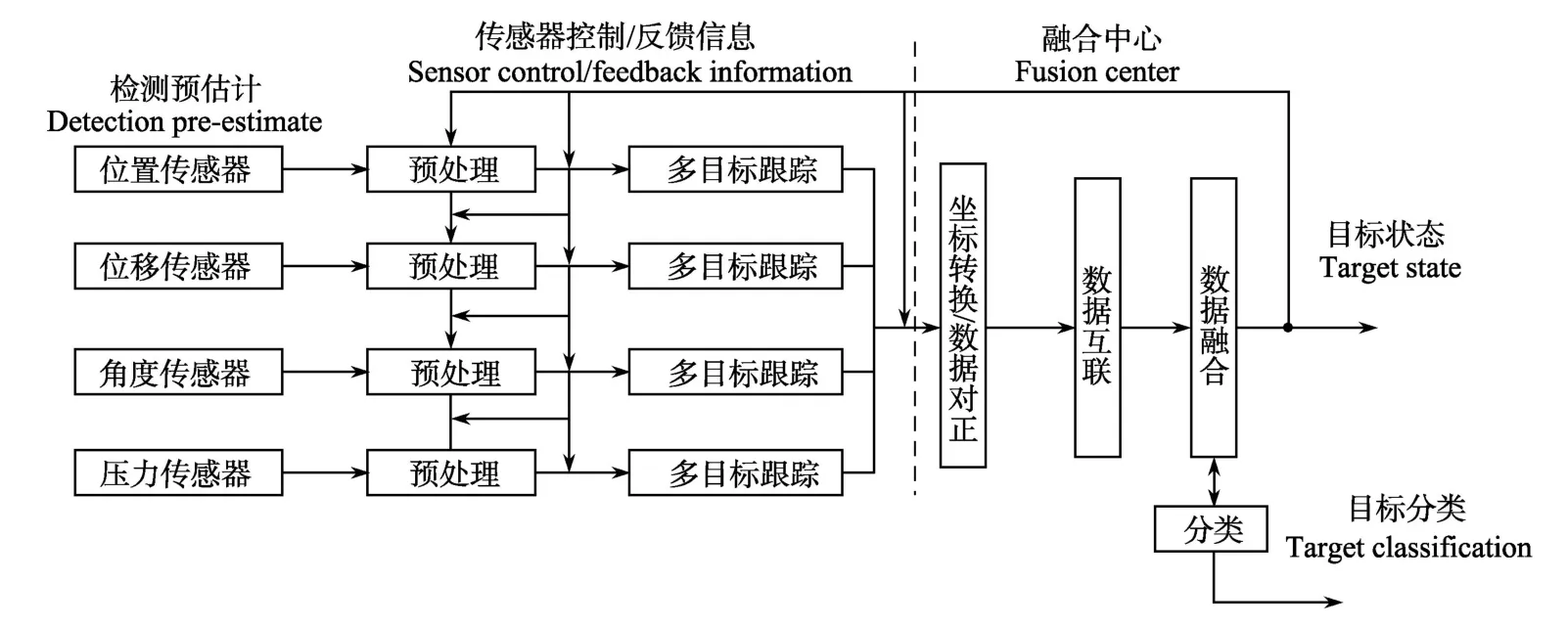
图3 分布反馈式融合Fig.3 Distribu ted feedback fusion
3.2 目标模型建立
骨折远端A点如图4所示从矫正前到矫正后的运动轨迹即图5的真实轨迹,假设观察者位于坐标原点O,则在k时刻A点运动轨迹上某点的位置坐标如图5所示,理想轨迹是不受任何外界干扰运动的轨迹,观测轨迹是在有系统噪声和观测噪声下目标的运动轨迹,实际轨迹是受外界干扰的实际运行的轨迹,获取尽可能接近于实际的运动轨迹,实际的运动轨迹是以实际观测点迹为基础的。
骨折远端A点在k时刻的运动空间坐标方程为:
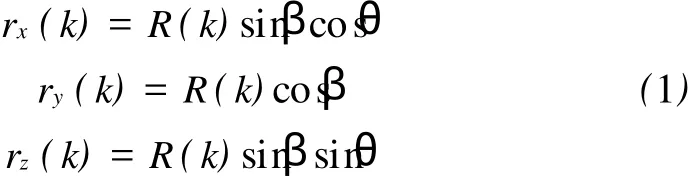
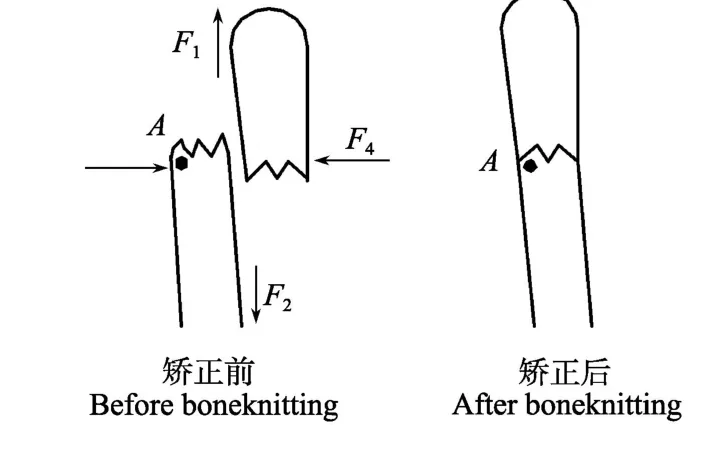
图4 手法治疗示意图矫正前Fig.4 Manual therapy
其中:R(k)为观察者位置到目标的距离,θ/β表示水平及竖直夹角。
在目标模型运动过程中,实际得到的测量信号是包含噪声的信号:
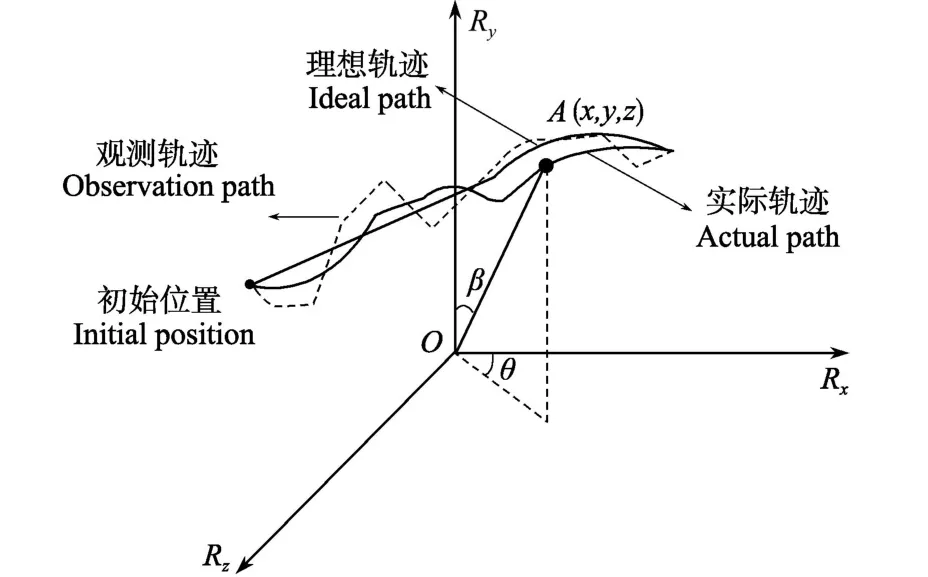
图5 运动目标空间坐标示意图Fig.5 Space coordinate of moving target

则得到系统的测量方程,即骨折远端模型在k时刻运动过程中的状态方程:

其中:X(k)为k时刻的目标状态向量,W(k)是观测噪声向量,s(k)为k时刻运动目标的位置矢量,H(s(k))是关于s(k)的函数。
3.3 目标轨迹模拟算法
模拟正骨手法获取上肢骨的运动的方向、位移、速度及运动的轨迹等物理量,目标的定位精度是关键,但是正骨手法的信息量相当大,存在不稳定性,因此状态估计采用非线性滤波方法——扩展卡尔曼滤波,其正在逐渐成为处理非线性系统状态及参数估计问题的标准方法[5-7]。扩展卡尔曼滤波可以对n个传感器的测量数据进行融合,既可以获得系统的当前状态估计,又可以预测系统的未来状态,所估计的系统状态可以表示移动目标的当前位置、目标的方位或速度,也可以从传感器数据中抽取特征或实际测量值本身。因此,通过扩展卡尔曼滤波可以获取手法复位过程中目标的定位精度和预测目标轨迹。
3.3.1 信号提取 首先对传感器采集的信号进行信号调节和信号处理得到有用的信号,采用m个采样值的平均值作为被估参量的近似值由于采用带有反馈式的融合结构,其输入输出信号的关系为
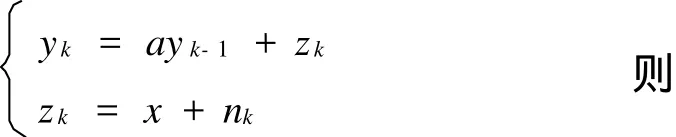

式中:zk为观测值或采样值,yk为输出值,x为恒定信号或被估参量,nk为观测噪声采样,a为<1的滤波器加权系数,^Xk为k时刻的估计值。
3.3.2 融合算法根据k时刻目标运动的真实状态,及扩展卡尔曼滤波融合算法的中心思想,将目标运动的状态估计中心算法归纳为:
(1)k+1时刻的目标转移的动态运动方程:

公式中:X(k)是k时刻目标的状态向量;G(k)是过程噪声分布矩阵;V(k)是过程噪声向量;Q(k)是运动方程正定协方差矩阵;Z(k)是传感器在k时刻的观测向量; R(k)是测量方程正定协方差矩阵。
从算法的过程可以看出,在本算法中可以不依赖于跟踪滤波器预测的位置,这样就可以不断地调整和更新滤波器参数,使其能更好地跟踪和预测目标的轨迹。运用扩展卡尔曼滤波的1个重要的前提条件是进行初始化,只有进行了初始化,才可以利用扩展卡尔曼滤波对目标进行跟踪[8]。根据给定的滤波计算初值,k时刻的目标状态量时,进行扩展卡尔曼滤波工作,利用观测输入对状态进行校正,然后进行状态预测,输出状态估计值,实时估计骨折远端的运动状态。
3.3.3 仿真结果与分析为了对上述方法进行验证,本实验在MATLAB环境下进行了仿真。仿真结果见图6,图中为目标位置的真实轨迹和滤波轨迹分别在X-Y,Y-Z,X-Z平面的投影。由仿真结果可以看出通过应用扩展卡尔曼滤波算法进行数据融合后的数据更接近目标运动的真实数据,由图中可以得出滤波前后目标轨迹在X轴、Y轴、Z轴的位置观测数据呈收敛性,达到了实验的预期效果,故扩展卡尔曼滤波算法应用于骨伤复位目标轨迹融合中是可行的,说明此法在理论上切实可行。但是由于模型的非线性因子会影响到滤波的稳定性和状态估计精度,有可能导致滤波的发散,在后期的实验中将会不断完善理论模型。
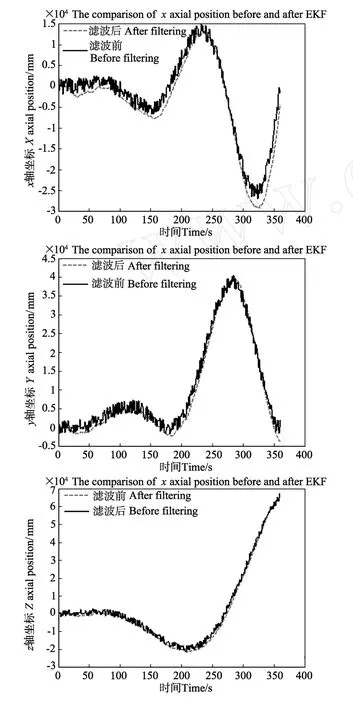
图6 扩展卡尔曼滤波算法仿真图Fig.6 Emulate of EKF
4 讨论
本文基于信息融合技术初步设立了模拟正骨手法的数学模型,以获取上肢骨模型在运动过程中的物理量,进行状态估计和轨迹模拟。通过EKF信息融合算法可以较为准确的估计出上肢骨模型在三维空间中运动的点轨迹,并通过仿真验证其有效性,为进一步研究虚拟正骨手法提供了相应的理论基础,该理论对上肢骨的状态估计表现出良好的性能,使其在实际应用中成为可能,具有较高的应用价值;但是实验设备在测试精度上存在一定的缺陷,在今后的实验中将继续改进模型或者应用其他信息融合算法达到实验要求。
多传感器信息融合技术虽然在军事、航天等领域的应用已经很广泛,但是在医学领域应用的较少,尤其是在骨伤领域应用尚少。结合现代先进的科学技术的优势,将中医抽象的问题科学化、数字化,实现中医的科学化发展。
[1] 王凤朝,黄树采,韩朝超.多传感器信息融合及其新技术研究[J].航空计算技术,2009,39(1):102-106.
[2] 朱泽君,黄涛,刘曦霞,等.多传感器数据融合技术研究现状及发展方向[J].舰船电子工程,2009,176(2):13-16.
[3] 陈敏.骨伤科手法治疗[M].北京:中国中医药出版社,1999.
[4] 杨万海.多传感器信息融合及应用[M].西安:西安电子科技大学出版社,2004.
[5] Shademan A,Janabi-Sharifi F.Sensitivity Analysis of EKF and Iterated EKF Pose Estimation for Position-based Visual Servoing [C].Canada:Proceeding of 2005 IEEE CCA on Control Applications,2005:755-760.
[6] 王晓宇,闫继宏.基于扩展卡尔曼滤波的两轮机器人姿态估计[J].哈尔滨工业大学学报,2007,39(12):1920-1924.
[7] 彭志专,冯金富.基于修正扩展卡尔曼的信息融合算法[J].空军工程大学学报,2007,8(5):33-36.
[8] 何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2007.
Abstract: This article aims at the development trend of objective and scientific of Chinese Medicine bonesetting manipulation,and mainly applying EKF algorithm for the physical analysis of the position,displacement and the relative shifting physiology angle of proximal fracture for the Chinese Medicine bonesetting manipulation in the virtual environment,and the locus simulation of target model in the virtual bone-setting manipulation,and provides a practical and recordable research platform for Chinese Medicine bone-setting manipulation.
Key words: information fusion;EKF;VR;bone-setting manipulation
责任编辑 陈呈超
The Research on Multi-Sensor Information Fusion Algorithm in the Virtual Bone-Setting Manipulation
CAO Hui,SON G Xiao-Rui,QIU Peng,ZHANGJun-Zhong
(Institute of Science and Technology,Shandong University of Traditional Chinese Medicine,Jinan 250355,China)
TP31
A
1672-5174(2011)04-127-05
山东省自然科学基金项目(ZR2010FM004);山东省教育厅计划项目(J07WD09);山东省信息产业厅专项资金(鲁财建指[2007]94);济南市科技局自主创新计划项目(200906007)资助
2010-04-11;
2010-07-20
曹 慧(1963-),女,教授。研究方向:生物医学信息处理与分析,虚拟现实技术应用。E-mail:caohui63@163.com
