带乘性噪声系统的最优方差约束鲁棒状态估计算法
2011-09-13褚东升王红都
褚东升,王红都,张 玲
(中国海洋大学工程学院,山东青岛266100)
带乘性噪声系统的最优方差约束鲁棒状态估计算法
褚东升,王红都,张 玲
(中国海洋大学工程学院,山东青岛266100)
带乘性噪声系统由于其广泛的适用性,一直成为研究的热点。针对带乘性噪声系统的鲁棒状态估计算法进行研究,利用线性矩阵不等式的方法,讨论状态方程中含有范数有界不确定性参数的带乘性噪声系统的方差约束鲁棒状态估计器存在的条件,并针对此类带乘性噪声系统推导出1套方差约束鲁棒状态估计算法以及最优方差约束鲁棒状态估计算法。仿真结果验证算法的有效性。
线性矩阵不等式;乘性噪声;方差约束;鲁棒状态估计;范数有界不确定性参数
基于最小方差准则的卡尔曼滤波方法广泛应用于控制、信号处理等许多领域[1-4],但是卡尔曼滤波方法需要知道精确的系统模型及统计特性。在工程应用时,由于模型不准确、模型退化及线性化等众多问题,致使实际系统模型参数呈现不确定性、随机性[3],难以用精确的数学模型来描述实际工程系统。大量的研究结果表明,由于模型存在误差,即使这种误差非常小,也可能使滤波效果非常差[3]。为了解决上述难题,鲁棒估计理论方法已经引起极大的关注并成为研究热点[4-6]。实际运行的工程系统往往存在乘性噪声的干扰,带乘性噪声随机系统的控制及滤波问题研究引起了人们的极大关注,它已经被应用在图像处理、目标识别、地震信号处理、水声信号处理等许多领域[6-8]。
近几年发展起来的方差约束鲁棒估计方法能够有效地解决含有不确定性参数的系统状态估计问题,目前该领域已经取得了一定的成果[3-5]。文献[9]讨论了一类同时包含随机不确定性参数和范数有界不确定性参数随机时变系统的鲁棒滤波算法,并得出2个便于在计算机实现的Ricatti方程。文献[10]对于含有随机不确定性参数的线性时不变离散系统进行研究,基于线性矩阵不等式推导出状态估计器存在的充分条件以及1套状态估计算法。文献[11]运用线性矩阵不等式的方法对有限信噪比模型的状态估计算法进行研究,推导此类系统状态估计器存在的充分条件以及基于线性矩阵不等式的状态估计器。文献[12]分别研究了一类线性不确定性连续和离散系统的鲁棒保成本滤波器,用线性矩阵不等式的形式给出鲁棒保本滤波器存在的检验条件,由线性矩阵不等式的解可求得滤波器各参数的值。以上文献针对只含有加性噪声的系统模型进行了讨论,对于既含有加性噪声又含有乘性噪声的情形算法将不能适用。文献[4]研究了一类状态方程中含有范数有界的不确定参数,观测方程有丢失观测数据的一类特殊的带乘性噪声系统,推导出了一对基于类似Ricatti方程不等式的方差约束滤波算法,但该算法结构复杂且不易用计算机实现。
目前,针对带乘性噪声系统的鲁棒状态估计算法的研究还远不完善。本文针对状态方程含有范数有界的不确定性参数、观测方程含有乘性噪声的系统进行研究,其中乘性噪声要求为已知一、二阶矩的白噪声,对噪声的分布没有限制,因此本文的系统模型具有更加宽泛的应用范围。本文推导出的基于线性矩阵不等式的方差约束状态估计算法及最优方差约束状态估计算法简练,更易于计算机实现,具有一定的理论意义及实际应用价值。
1 问题描述
本文主要研究以下时不变模型:

其中x(k)∈Rn为状态向量,y(k)∈Rm为观测向量。w(k)、v(k)分别为系统动态噪声和观测噪声,m(k)为乘性噪声,并满足以下假设条件:
假设1 E{w(k)}=0,E{w(k)wT(j)}=Wδkj,
假设2 E{v(k)}=0,E{v(k)vT(j)}=Vδkj,
假设3 E{m(k)}= ̄m,E{[m(k)- ̄m][m(j)- ̄m]T}= ˇm2δkj,
假设4 {m(k)}、{w(k)}、{v(k)}、及{x(0)}相互独立。
ΔA是系统的参数不确定性因素构成的可描述集,它具有如下的结构

M、N是具有合适维数的常系数矩阵,F为范数有界的不确定量。
在设计估计器之前,本文需要假设系统(1)(2)是二次稳定的[13]。
2 方差约束鲁棒估计器的定义
假设系统(1)(2)的方差约束鲁棒状态估计器具有如下结构
其中FFT≤I,则系统(1)(2)的稳态估计方差P存在,且。
定义1 如果增广系统(9)满足式(14),则称估计器(4)为方差约束鲁棒估计器。
3 方差约束鲁棒估计器的设计
定义1给出了带乘性噪声系统(1)(2)的鲁棒状态估计器存在的充分条件,但(14)式中含有不确定量因而难以验证。为了使其便于验证求解,本文基于线性矩阵不等式讨论了鲁棒状态估计器存在的条件。在设计带乘性噪声系统的鲁棒状态估计器之前需要引入以下3个引理。
引理2[15]给定对称矩阵Q(x)=QT(x),R(x)=RT(x),S(x)=ST(x),则下列3个条件是等价的:
引理3[15]给定矩阵Y是对称矩阵,M和F具有相应维数的矩阵,满足
针对带乘性噪声系统(1)(2),以定理1的形式给出其增广系统(9)满足(14)式的充要条件。
定理1 存在鲁棒方差约束估计器Gf=[G K]使(14)式成立的1个充要条件是:存在ε>0和正定对称矩阵¯P>0使得下列不等式成立:

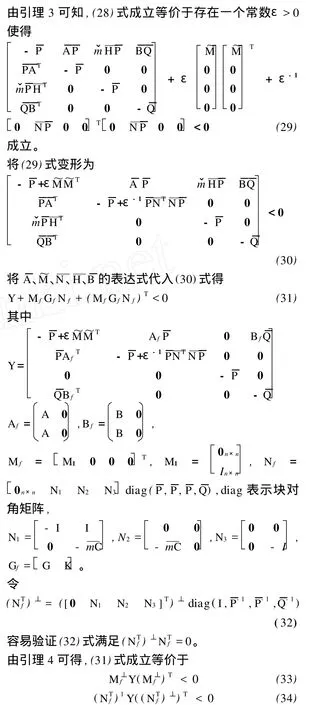
两式成立。
将M⊥f的表达式代入(33)式得(25)式成立。将(32)式代入(34)式得(26)式成立。
若上述条件成立,估计器Gf=[G K]为方差约束鲁棒估计器,由引理1可得系统的稳态估计方差P< ¯P22。证毕。
定理1给出了带乘性噪声系统(1)(2)的鲁棒状态估计器存在的充分条件,但是由于定理1所示的矩阵不等式并不是严格的线性矩阵不等式,难以求解。因此本文基于引理4给出便于利用计算机求解的定理2。定理2 存在1个鲁棒方差约束估计器Gf=[G K]使得(14)式成立的1个充分条件是:存在ε>0,μ1<0, μ2<0和正定对称矩阵X使得下列不等式成立:

若上述条件成立,则系统(1)(2)的稳态估计方差P< (X-1)22。
证明
由引理4知,(25)式成立等价于存在μ1∈R使得

令(38)式两边同乘以diag(X,X,X,¯Q-1,I,I,I),可得(35)式。
由引理4知,(26)式等价于存在μ2∈R使得

若μ2<0,由引理2知(41)式成立等价于(36)式成立。
由引理1可得,系统的稳态估计方差P<(X-1)22。证毕。
为使针对系统(1)(2)的鲁棒估计器能够满足系统稳态估计方差小于某一特定值的设计要求,本文给出定理3。
定理3 系统(1)(2)的鲁棒方差约束估计器存在,且系统的稳态估计方差满足P

其中H=[0 In×n]。
将所求得的¯P=X-1、ε代入(31)式,则鲁棒估计器Gf=[G K]可以通过(31)式由Matlab的basiclmi函数求出。
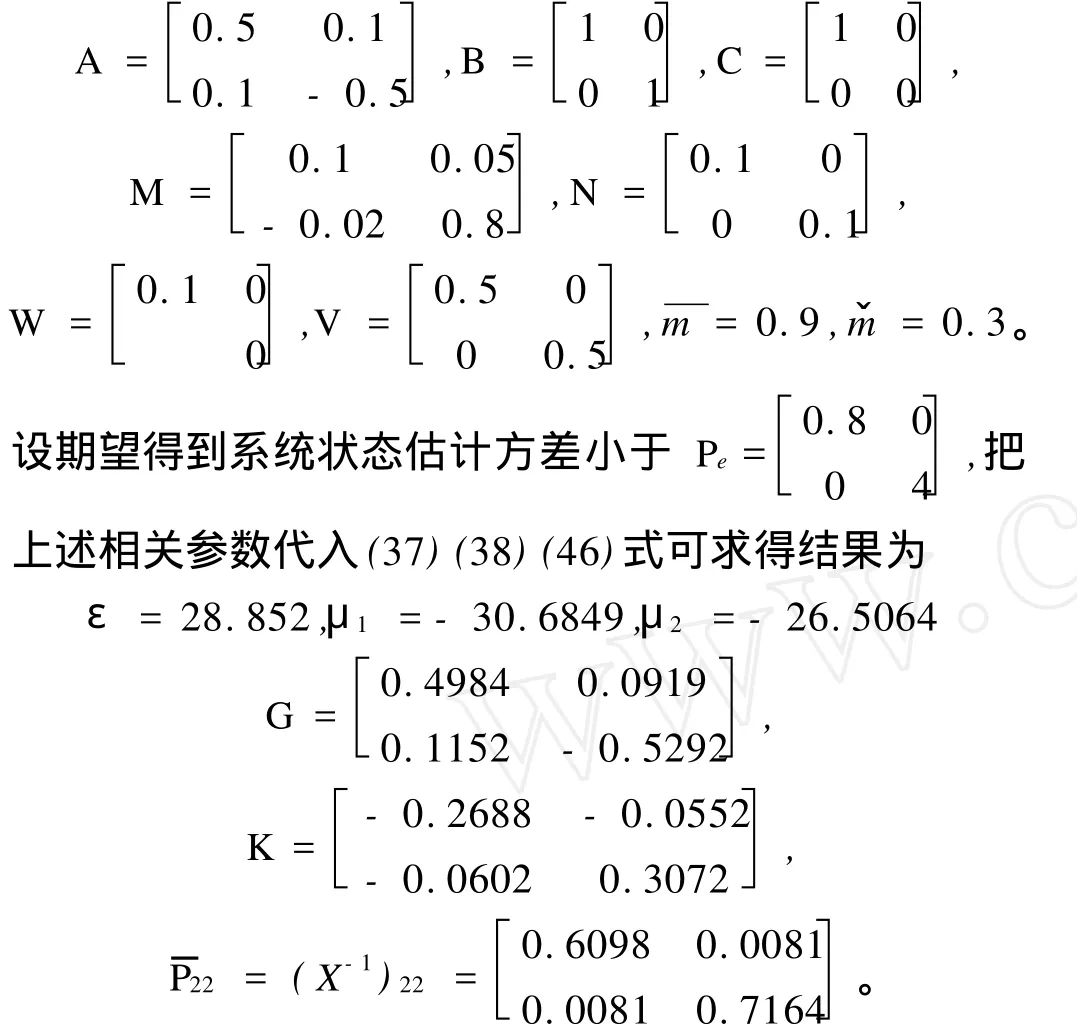
证明 由引理2可知,(42)式等价为(X-1)22 定理3给出了如何在给定误差Pe水平下来设计鲁棒滤波器。在鲁棒滤波器存在的条件下,通过某种给定的准则来进一步优化Pe非常有意义。由定理3知,Pe、P正定,且P 如果有解ε>0,μ1<0,μ2<0,X>0,Pe>0,将所求得的¯P=X-1、ε代入(31)式,由Matlab的basiclmi函数求出的鲁棒估计器Gf=[G K]为最优方差约束鲁棒估计器。 仿真1 为了验证本文提出的算法的有效性,针对系统(1)、(2)采取文献[4]中的例子进行了仿真,参数如下 可见¯P22远小于文献[4]中获得的鲁棒估计器增益‖G‖=0.5435,‖K‖= 0.3130,也小于文献[4]中的估计器增益‖G‖= 1.1669,‖K‖=0.8073。由此可以看出,本算法与文献[4]相比,在相同的条件下得到的约束方差¯P22更小,估计器增益也较小,估计器性能得到了很大的提高。分别用本文及文献[4]中得出的数据进行仿真,仿真实例运行100次取平均后,得出的系统各状态分量的平均估计方差分别如图1、2中的…线和—线所示。从图1可以发现运用本文提出的算法求得的平均状态估计方差更小,也更平滑,从而验证了该算法的有效性。 仿真2 针对仿真1中的模型,用定理4可求得 可以分析得出¯P22<¯P′22,且‖G‖>‖G′‖= -0.5167,‖K‖>‖K′‖=0.2714,这说明本文提出的最优方差约束鲁棒估计器具有更好性能。利用仿真1中的数据,仿真实例运行100次取平均后,得出的系统各状态分量的平均估计方差分别如图1、2中的*线所示。 图1 状态分量x1的平均估计方差Fig.1 Average estimation variance of the first state component 图2 状态分量x2的平均估计方差Fig.2 Average estimation variance of the second state component 本文给出了带乘性噪声系统的方差约束鲁棒估计器的定义,基于矩阵不等式理论给出了带乘性噪声系统的鲁棒估计器存在条件以及1个用线性矩阵不等式来表示且便于实现、便于验证的充分条件,并推导出1套带乘性噪声系统方差约束鲁棒状态估计算法以及1套最优方差约束鲁棒状态估计算法。仿真结果验证了算法的有效性。该算法能够解决线性时不变带乘性噪声系统的鲁棒状态估计问题,且容易在计算机中实现,便于工程实际应用。针对线性时变带乘性噪声系统、非线性带乘性噪声系统等鲁棒状态估计问题有待于进一步的研究。 [1] Anderson B,Moore J B.Optimal filtering[M].NJ:Pretence-Hall,1979. [2] Wang Fan,Balakrishnan V.Robust Kalman filters for linear timevarying systems with stochastic parametric uncertainties[J]. IEEE Trans on Signal Processing,2002,50(4):803-813. [3] Lewis F L,Xie L,Popa D.Optimal and robust estimation:with an introduction to stochastic control theory[M].NY:CRC Press,2008. [4] Wang Zidong,Dniel W C Ho,Liu Xiaobui.Variance-constrained filtering for uncertain stochastic systems with missing measurements[J].IEEE Trans on Automatic Control,2003,48(7): 1254-1258. [5] Wang F,Balakrishnan V.Robust estimators for systems with deterministic and stochastic uncertainties[C].Proceedings of 38th conference on decision and control,phoenix,1999,12:1946-1951. [6] 褚东升.带乘性噪声系统的估计理论与应用[D].哈尔滨:哈尔滨工业大学,1993. [7] Primbs J A.Stochastic receding horizon control of constrained linear systems with state and control multiplicative noise[C].New York:2007 American Control Conference,2007:4470-4475. [8] 褚东升,赵爱美.带乘性噪声系统的多尺度最优滤波融合算法[J].中国海洋大学学报:自然科学版,2006,36(3):493-496. [9] Yang Fuwen,Wang Zidong,Hung Y S.Robust Kalman filter for discrete time-varying uncertain systems with multiplicative noise[J]. IEEE Trans on Automatic Control,2002,47(7):1179-1183. [10] Li Weiwei,Todorov E,Skelton R E.Estimation and control of systems with multiplicative noise via linear matrix inequalities [C].Portland:2005 American control conference,2005,6: 1181-1816. [11] Li Weiwei,Skelton R E,T odorov E.State estimation with finite signal-to-noise models via linear matrix inequalities[J].Journal of Dynamic Systems,Measurement and Control,2007,129(3):136-143. [12] 刘诗娜,费树岷,冯纯伯.线性不确定系统鲁棒滤波器设计[J].自动化学报,2002,28(1):50-55. [13] Peterson I R,Savkin A V.Robust kalman filtering for signals and systems with large uncertainties[M].NY:Birkhauser Boston,1999. [14] Boyd S,Ghaoui L E,Feron E,et al.Linear matrix inequalities in system and control theory of studies in applied mathematics[M]. Philadelphia:SIAM,1994. [15] 俞立.鲁棒控制-基于线性矩阵不等式处理方法[M].北京:清华大学出版社,2002. [15] Pascal Gahinet,Alan J Laub.LMI control toolbox for use with MATLAB[M].MA:MathWorks,Inc.,1995. Abstract: The system with multiplicative noise,due to its extensive applicability,has become the research focus.Using the method of linear matrix inequality,this paper discusses the existence condition of the variance constrained robust state estimator for a class of system with multiplicative noise which has deterministic norm-bounded uncertainties.A robust state estimation algorithm with the provided constrained variance and an optimal variance-constrained robust state estimation algorithm for this kind of system are presented in the terms of linear matrix inequalities.Simulation results are given to show the effectiveness of the algorithm. Key words: linear matrix inequality;multiplicative noise;variance-constrained;robust state estimation; norm-bounded uncertainties 责任编辑 陈呈超 Optimal Variance-Constrained Robust State Estimation Algorithm for Systems with Multiplicative Noise CHU Dong-Sheng,WANG Hong-Du,ZHAN G Ling TP31 A 1672-5174(2011)04-121-06 国家自然科学基金项目(60704023)资助 2010-06-21; 2010-07-30 褚东升(1956-),男,教授。E-mail:chuds@263.net4 数值仿真



5 结语
(College of Engineering,Ocean University of China,Qingdao 266100,China)
