实时精密单点定位精度与收敛性分析*
2011-08-29任晓东张小红
任晓东,何 俊,张小红
(武汉大学测绘学院,湖北 武汉430079)
0 引 言
随着定位需求的不断提高,卫星导航定位技术正朝着实时、高精度、高可靠性的发展方向。而作为目前乃至未来实时高精度动态定位主要技术手段之一的精密单点定位技术,已成为卫星导航定位领域所关注的热点[1-2]。在实时PPP的研究方面,JPL的Muellerschoen等人在2000年提出了全球实时精密单点定位技术(RT-PPP),计算结果表明RT-PPP水平方向定位精度为10cm~20cm.NAVCOM的Hatch在2001年提出了利用JPL实时定轨软件RTG实现全球RTK计划,通过因特网和地球静止通信卫星向全球用户发送精密星历和精密卫星钟差修正数据,利用这些修正数据,实现2~4dm的实时动态定位精度,事后静态定位精度可达2~4cm。除了上述,还有部分相关机构开展了这方面的研究,并在系统开发方面取得了初步成果[3-5]。
1 IGS实时精密产品介绍
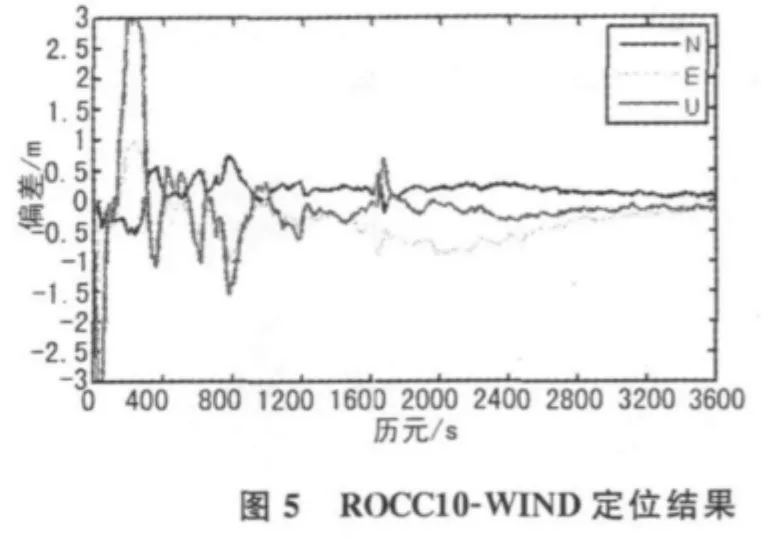
实时精密单点定位最重要的是实时地得到精密的卫星轨道和钟差。目前,IGS的主要分析中心和其它一些著名的卫星导航研究机构通过现有的IGS连续跟踪站和自己的数据处理软件实时估计得到精密的卫星轨道和卫星钟差,并提供了这些实时的精密卫星轨道和卫星钟差的改正系数(ROCC产品),这15种ROCC产品的基本参数如表1所示。
表1中,Name代表精密卫星轨道和钟差改正系数的代号;Misc代表提供该产品的组织;Generator代表该组织提供生成该产品的所采用的软件;System代表提供的改正系数所包括的卫星系统,GPS指只提供GPS卫星的ROCC值,GPS+GLO指不但提供GPS卫星的ROCC值,而且提供GLONASS卫星的;Identifier代表提供的ROCC值是基于卫星相位中心的还是质量中心;BRDC_APC_ITRF表示提供的ROCC值是基于相位中心的改正系数,且坐标框架为ITRF;BRDC_CoM表示提供的ROCC值是基于卫星质量中心的改正系数,且坐标框架为ITRF;Format代表ROCC产品的编码格式。
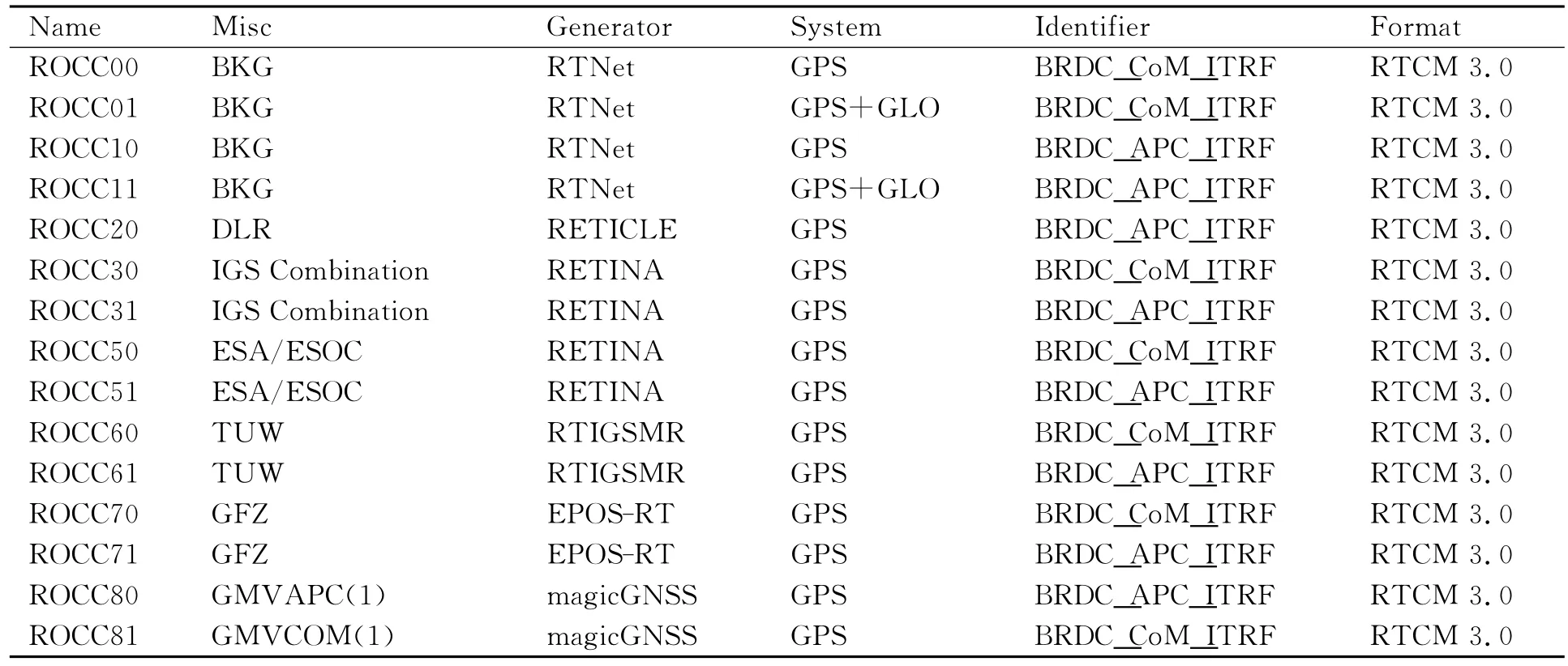
表1 不同ROCC改正系数产品的基本参数
2 BNC软件介绍
BNC软件是由BKG开发的一款用于实时同步接收、解码及转换的GNSS数据流管理软件。采用BNC软件进行实时精密单点定位时,其主要功能是接收来自Ntrip Caster的由IGS提供的精密轨道和钟差的改正系数,以及实时广播星历数据流,并对其进行解码,同时通过TCP/IP、UDP通讯接收来自测站接收机的观测值,通过这些数据流完成精密单点定位,具体流程如图1所示。

图1 BNC软件的实时精密单点定位流程[6]
3 实验分析
3.1 实验方案
为了分析BNC软件中实时PPP定位模块本身的定位精度和收敛速度以及采用15种不同的ROCC产品对定位结果的影响,笔者选取了全球25个IGS连续跟踪站(其分测站布图如图2所示),对其在2011年6月15日进行24小时的实时精密单点定位,并得到实时定位结果。
3.2 实验结果及分析

图2 实验分析的25个IGS连续跟踪站位置分布图
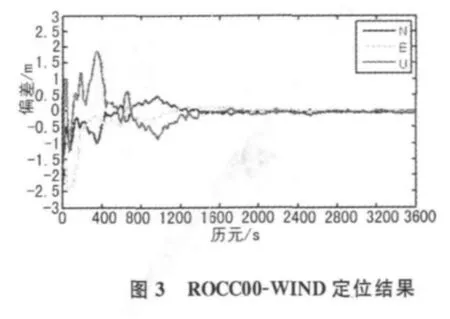
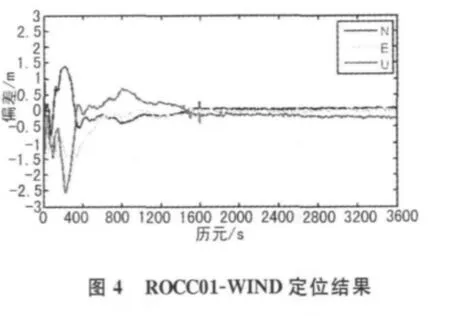
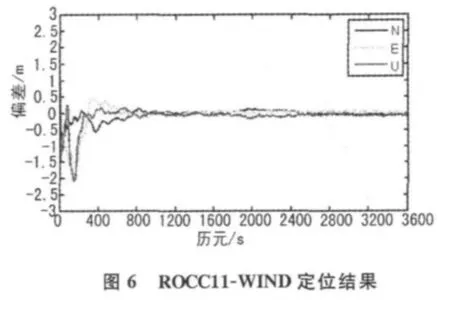
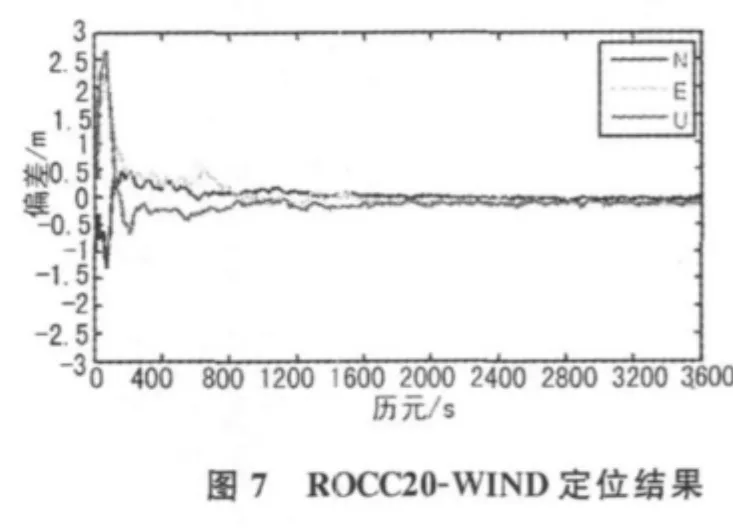
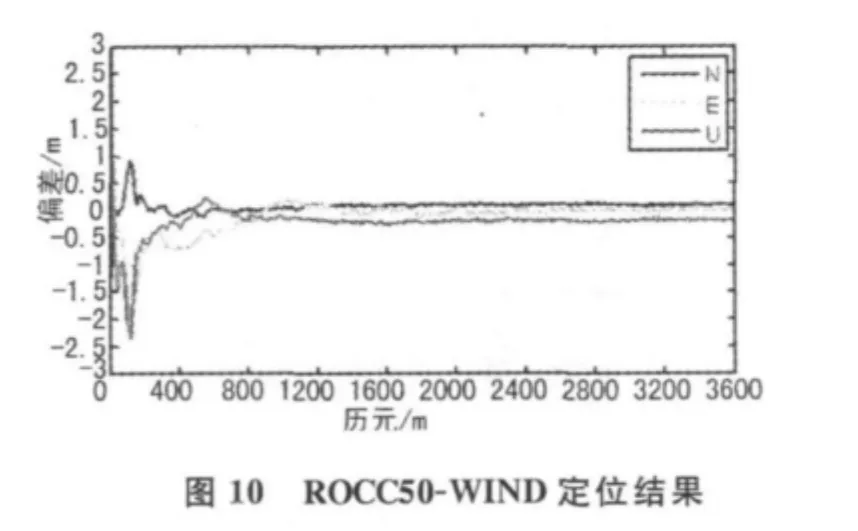
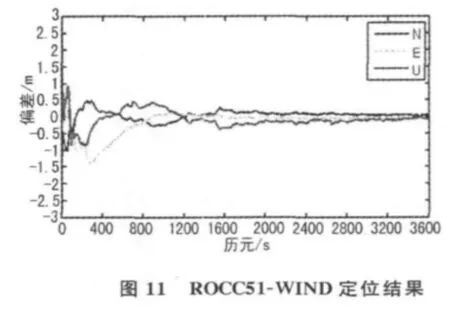
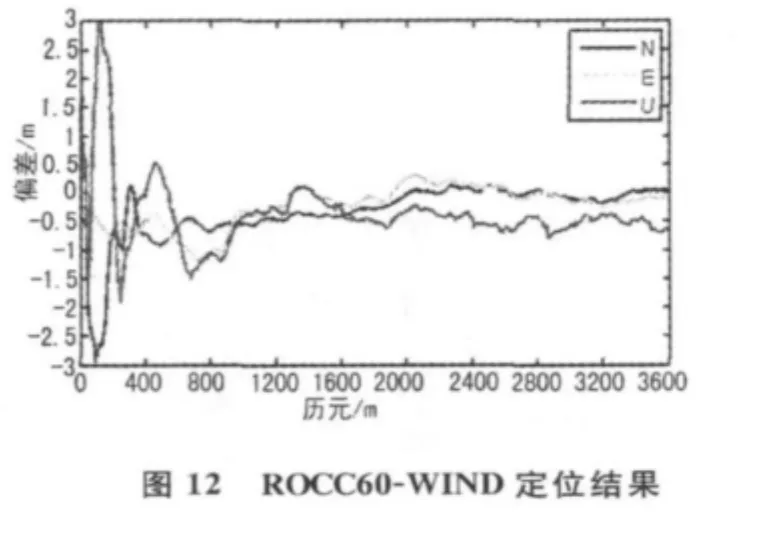
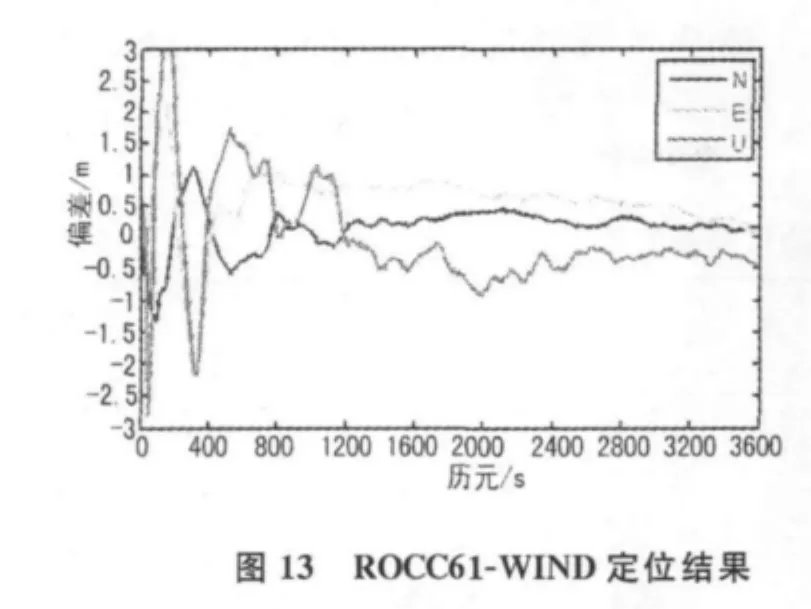
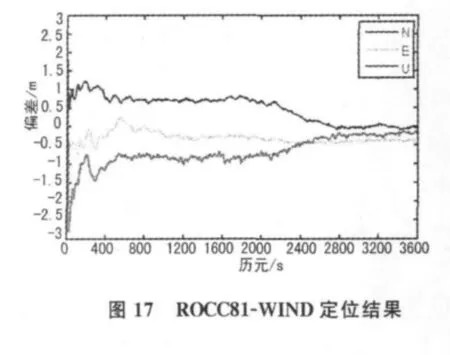
鉴于篇幅限制,笔者只给出 WIND测站的实时精密定位结果,其它测站与此类似,本文不再赘述。如图3~17所示,分别表示采用15种ROCC产品用对WIND测站前1h的实时PPP的定位结果与IGS提供的参考坐标在N、E、U方向上的互差(注:选取1h目的在于分析其收敛性),图中次深、浅色、深色依次代表N、E、U(北、东、天)三个方向的定位偏差。同时,本文对15种ROCC的定位平均偏差、RMS值和定位收敛时间进行了统计,其统计结果如表2所示,其相对值如图18和图19所示。(注:定义定位收敛时间表示从定位开始到N、E、U方向均稳定在5dm内所需的时间;统计平均值为收敛后的统计平均值;RMS值表示定位结果与真值坐标的统计标准差)
由图3~图17可以看出,通过15种ROCC改正得到的实时精密卫星轨道和精密卫星钟差,对WIND测站进行实时精密定位的结果收敛后均能达到较高的定位精度,能满足用户的定位需求,且都需要经过不等时间的收敛过程,个别ROCC定位结果在N、E、U方向存在一定的系统性偏差。


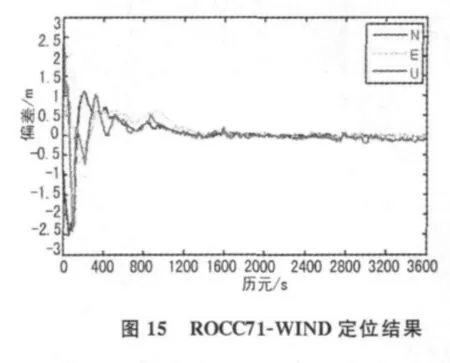

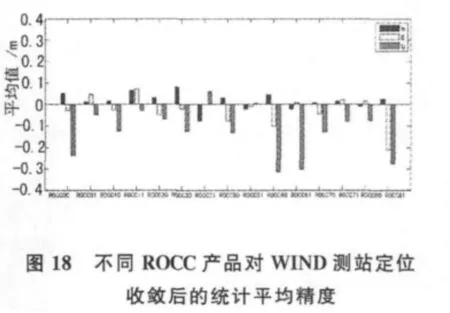
由图18可知,15种ROCC的定位结果在收敛后,其N、E、U方向的定位精度均能达到4dm以内。其中,15种ROCC其N、E方向定位精度约1dm以内;U方向的定位精度则在1~2dm左右。而且 ROCC01、ROCC10、ROCC11、ROCC71在三个方向的定位精度均达到了cm级。因此,在实际定位中如果对定位精度要求较高可优先考虑使用这几种ROCC改正后的精密卫星轨道和精密卫星钟差产品。
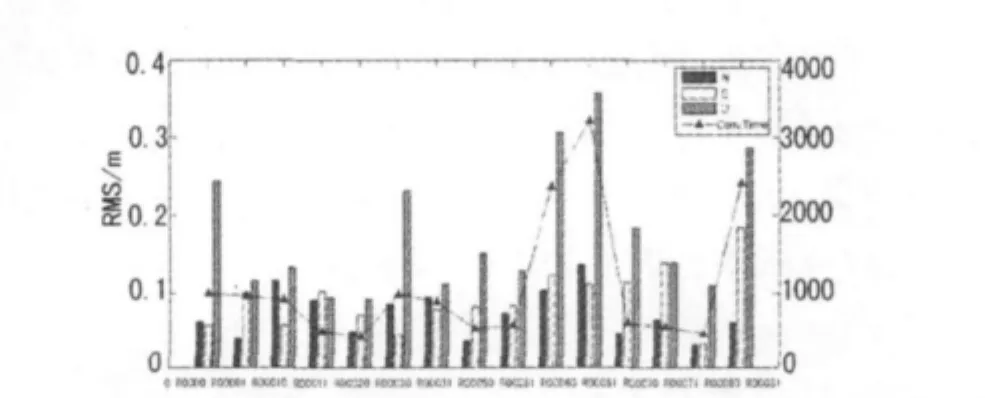
图19 不同ROCC产品对WIND测站定位收敛后的RMS值及收敛时间
在图19中,柱状图的深、浅、次深分别表示不同ROCC改正后的精密卫星轨道和钟差对WIND测站的定位结果在N、E、U方向上的统计RMS值,深色三角形则表示不同ROCC改正后实时定位的收敛时间,右侧坐标轴为收敛时间的坐标轴。结合图18可以看出,定位精度较好的产品,其定位结果的RMS值也相对较小。总体来说,15种ROCC的RMS值均在4dm以内,且N、E方向的RMS值为8cm左右,U方向为1~2dm左右。在收敛时间上,大多数ROCC的收敛时间为15min左右,其中收敛速度最慢的ROCC60、ROCC61、ROCC81的收敛时间为30~40min,而收敛速度较快的 ROCC11、ROCC20、ROCC51、ROCC70、ROCC71等,其收敛时间平均约为8min左右。
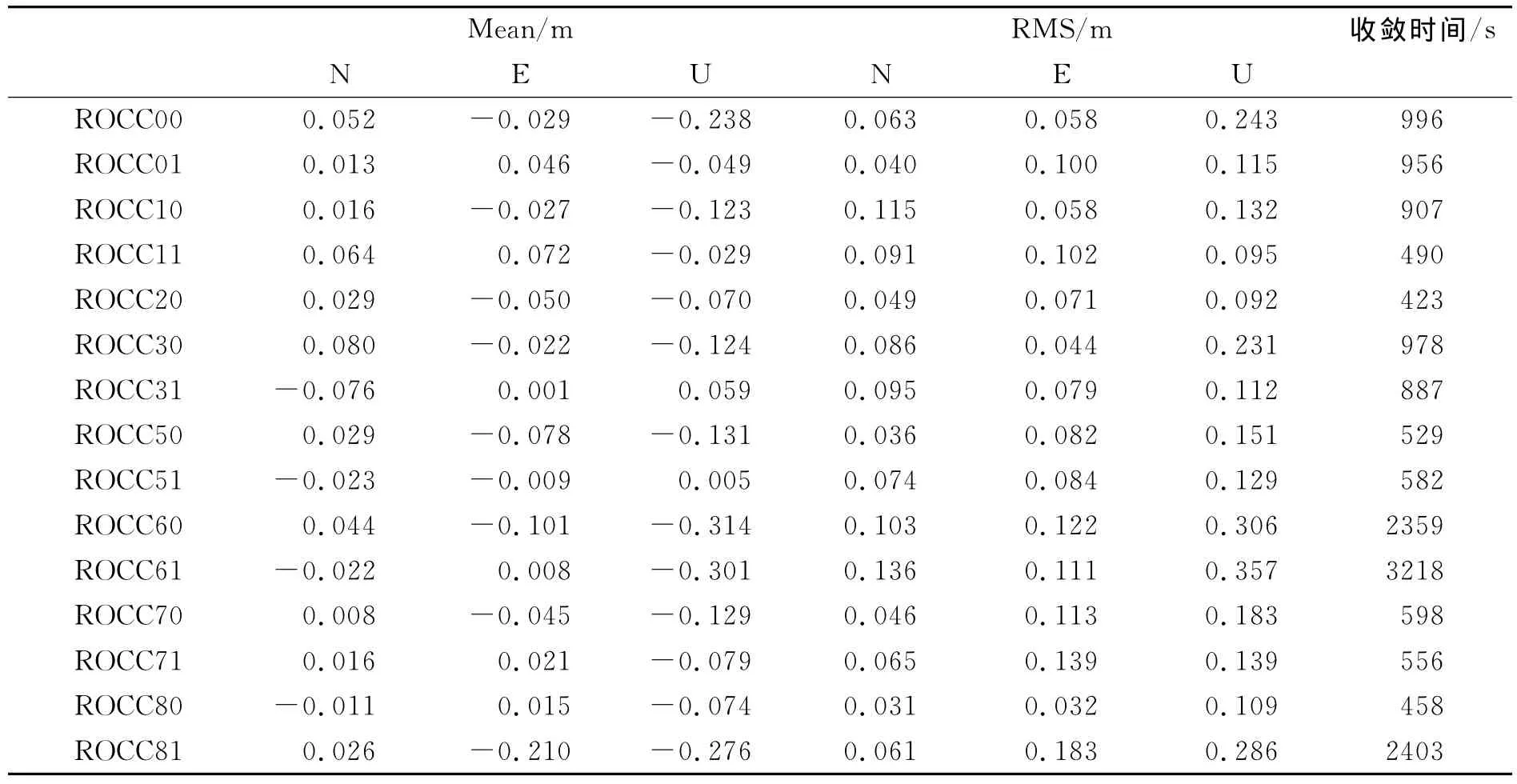
表2 15种ROCC产品对WIND测站的实时定位结果影响
4 结 论
采用IGS的15种实时精密产品,利用BNC软件对全球25个连续跟踪站进行24小时的实时精密单点定位,并对结果进行了深入分析,得出以下结论:
1)总体来说,采用这15种ROCC产品利用BNC软件进行实时精密单点定位的精度能够达到4dm以内,能够满足用户的定位需求。
2)不同的ROCC产品的实时精密定位结果精度和收敛时间是各不相同的。在兼顾定位精度、收敛时间上,这15种ROCC中的ROCC11、ROCC20、ROCC71能够利用较短的时间得到较好的定位结果。这三种ROCC的平均收敛时间约为6~9min,N方向和E方向的定位精度为3~6 cm,U方向为5~10cm.建议在实时系统建立的过程向用户播发这几种定位精度高且收敛速度快的ROCC改正后的实时精密卫星轨道和实时精密卫星钟差。
[1]Zumberge J F,Heflin M B,Jefferson D C,et al.Precise point positioning for the efficient and robust analysis of GPS Data from large networks.[J].Geophys Res,1997,102(B3):5005-5017.
[2]Kouba J,Heroux P.Precise point positioning using IGS orbit and clock products[J].GPS Solution,2001,5(2):12-28.
[3]张小红,李星星,郭 斐,等.基于服务系统的实时精密单点定位技术及应用研究[J].地球物理学报,2010,53(6):1308-1314.
[4]Ge M R,Chen J,Gendt G.EPOS-RT:Software for realtime GNSS data processing [C]//General Assembly European Geosciences Union.Vienna,Austria,2009.
[5]Shi Chuang,Zhao Qi-le;Geng Jiang-hui,et al.Recent development of PANDA software in GNSS data processing[C]//International Confercence on Earth Observation Data Processing and Analysis(ICEODPA).Wuhan Hunan,China:SPIE,2008.
[6]GNSS Data Center.BNC Software(2010):BKG ntrip client software,Version 2.4[EB/OL].[2011-07-20].http://igs.bkg.bund.de/ntrip/download.
