基于GPS的外测设备精度鉴定测姿方法的研究与应用*
2011-08-29刘丙申孙付平张绍军
刘丙申,孙付平,张绍军
(1.信息工程大学测绘学院,河南 郑州450052;2.63883部队,河南 洛阳471000;3.63880部队,河南 洛阳471003)
0 引 言
全球定位系统(简称GPS)建成以来,在军事、导航、勘测等领域的应用日益广泛。系统除了能够满足众多用户的导航、测量、授时需求以外,在运动载体姿态测量领域的技术也日趋成熟。
随着靶场航天测控系统的发展,对外测设备精度鉴定试验提出了更高的要求,对鉴定标准精度的要求越来越高[1]。而在高动态GPS精度鉴定试验中,影响精度的因素为鉴定标准设备的测量精度和因飞行目标的姿态变化引起的跟踪点不一致修正误差,尤为后者影响较大。由于目前精度鉴定试验所采用的电子罗盘测姿系统测姿精度低、工作繁琐且易受外界环境和磁场的影响,已不能满足靶场外测设备精度鉴定任务的要求,迫切需要提高飞行目标的姿态测量精度。为此针对鉴定试验的新需求,开展GPS外测设备精度鉴定测姿方法的研究与应用,提出利用GPS取代电子罗盘进行飞机姿态测量一种新的测姿方法,使系统使用范围得到拓宽、鉴定标准的精度进一步提高,将在航天测控设备精度鉴定、飞行目标高精度测姿等试验领域发挥极大地作用。
1 GPS测姿原理
1.1 GPS测姿基本原理
GPS测姿的基本原理应用了GPS动态相对定位理论[2]。其高精度实时动态差分定位的核心技术是动态解算载波相位测量整周模糊度(Ambiguity Resolution On The Fly,OTF)[3-4]。关于动态差分定位的基本理论和实践问题得到了较好的解决,尤其是短基线情况下,可以可靠地解算出整周模糊度,获得很高的定位精度。
在目前情况下,高精度GPS接收机实时动态差分定位的精度可达2cm[5]。下面以单基线为例来说明GPS测姿系统的基本原理并给出计算公式,假定沿飞机机身方向安装主副两个GPS天线,形成了短基线GPS相对定位系统,此时,副天线相对于主天线的高度差便反映了飞机俯仰变化,其基线在当地水平面的投影线与正北夹角便反映出了飞机机头指向(即航向角)。
这里以主天线相位中心为坐标原点O,x轴指大地北,y轴指天,z轴成右手系建立一个测量坐标系O-x,y,z.设在某一观测时刻ti,副天线的相位中心在 O-x,y,z坐标系中坐标为[xi,yi,zi],在前面假设条件下,既主、副天线连线与机身的纵轴平行,延机头方向副天线在主天线之前,则此时飞机的航向角Ai,俯仰角Ei可表达为

如果说此时主副天线安装连线与纵轴垂直的话,上式中的Ei就表征了飞机的滚动角。
实际应用中,一条基线是无法完整地解出3个姿态角的。而至少需要两条基线,即4天线构成的两条正交基线为四天线法。
其测姿精度可用下式估算
相对定位误差(cm)÷天线基线(cm)×57.3(°)(2)
1.2 典型的GPS测姿系统组成
目前的GPS测姿系统有两种典型的配置方式,其一是采用3~4台独立的精密测量型GPS接收机再加上专业的实时/事后处理软件组成;其二是选用自主解算的姿态测量型GPS接收机。
1.2.1 独立GPS接收机测姿系统
如图1所示,在动态载体上安装3~4台独立的精密测量型GPS接收机,同时安装用于数据采集和信息处理的工控计算机。GPS天线将来自卫星的信号转化为电信号并通过线缆传送到各自的GPS接收机,接收机完成对卫星信号的处理并将载波相位观测量通过串行数据接口送至工控计算机。运行于工控计算机上的姿态解算软件利用这些数据以及事先输入的GPS天线的位置实时完成姿态值的解算。

图1 独立GPS接收机测姿系统组成
1.2.2 自主解算的姿态测量型接收机测姿系统
此类接收机的典型结构图2所示,接收机内部的数据流向为三个从接收机将数据发送到主接收机,主接收机处理来自四个GPS数据,实时给出解算结果。需要说明的是,这四台接收机采用相同的时钟电路,可以在进行解算的时候减少由于接收机时钟引入的未知数的个数。另外,采用4台GPS接收机与4个GPS天线是为了克服在实际应用当中由于载体并非刚体而引入的不确定性。
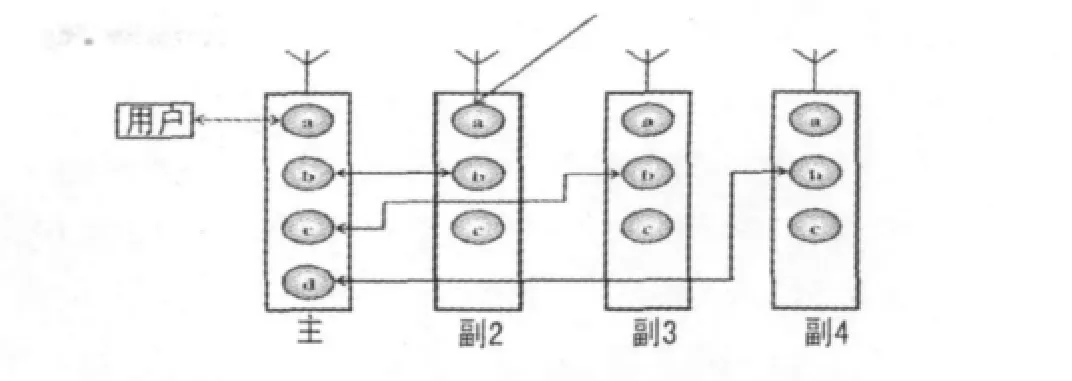
图2 自主解算的姿态测量型接收机测姿系统典型结构
1.2.3 两种方案的比较
上述两种方案从理论分析,都能够达到0.1°至0.2°的测姿精度(GPS测量基线在4m至8m的情况下)。但从性价比和系统用途的广泛性角度着眼,显然方案一的组成更加灵活、应用更加广泛。而方案二为专用于GPS姿态测量型的接收机,设备集中于一体且多为单频。因此,对于精度较高、多任务要求第一种方案为好。当然应用中可根据情况而定。
2 精度鉴定GPS测姿系统的组成和应用分析
2.1 精度鉴定中GPS测姿特点
靶场外测设备精度鉴定试验对GPS测姿有其自身的要求。从装机实际应用看,目前实现双基线四天线安装比较困难;从精度鉴定试验对飞机姿态变化情况看,由于精度鉴定数据比对段大多为直航路,三轴变化中滚动角变化较小(1°左右)影响不大,仅需完成偏航角、俯仰角的测量即可;从性价比和系统用途的广泛性看,应用独立GPS接收机测姿系统较好。
2.2 精度鉴定中GPS测姿系统的组成
根据靶场外测设备精度鉴定对试验飞机测姿的总体要求及测姿特点,为组成灵活、应用方便、提高性价比,采用独立GPS接收机测姿方案较好。具体为2台NovAtel DL-PLUS4型GPS接收机构成主副测量系统与便携式计算机及相关的软件等组成测姿系统。设备布局参照图1,主副接收机尽量安装于机背中心轴上。
2.3 精度鉴定GPS测姿系统应用可行性分析
为了验证和分析GPS测姿系统的可行性,通过静态试验即对测量数据进行动态相对定位和姿态解算,并同大地测量结果比对;利用实际飞行数据即从测姿型GPS实测数据中分流出主、副天线GPS测量数据,仿独立GPS接收机测姿数据处理结果进行精度分析。
2.3.1 静态试验及分析
在一宽阔的水泥场坪上选一中心点,以2m至20m的不同距离为半径画出5个同心圆,从正北方向开始每隔45°设一测量线其与同心圆的相交点上设为标志点。用精密的大地测量经纬仪进行中心点与各标志点测量,测出准确的基线长度与“中心点至标志点”连线的正北夹角(基线测量精度<3mm,角度测量精度优于10″)。
具体试验时,中心点放置一台高精度的GPS接收机做基准站并模仿GPS测姿系统“主接收机”工作,同时在各标志点依次放置另一台高精度的GPS接收机做基准站并模仿GPS测姿系统“副接收机”工作,记录所有原始测量数据。
试验后应用商业化GPS后处理软件处理得到的各标志点与中心点的基线及其连线的正北夹角数据,并与精密的大地测量结果比对,由于方差的大小反映了总体观测结果靠近真值的程度[6]。因此,利用方差式均方差(中误差)对比对结果作统计分析。
试验条件:数据采样率10c/s,卫星载止角15°,可见卫星6颗以上,共同采样时间10min,GPS精度品质因数Q=1。
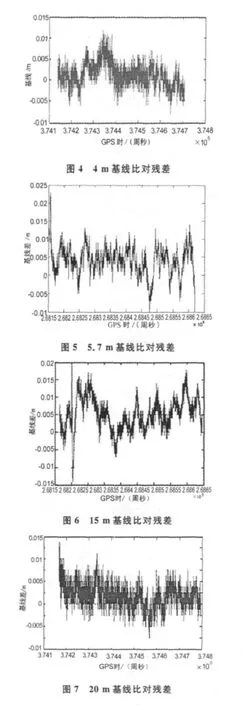
试验统计结果如表1、图3~图7所示。
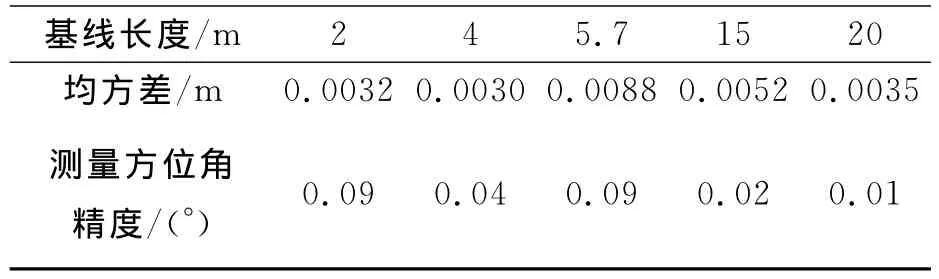
表1 静态测量统计结果

图3 2m基线比对残差
从表1中可以看出,GPS静态相对测量中,其基线测量精度优于1cm,地面水平角(相当于飞行时的航行角)测量精度优于0.1°。但基线长度小于2m和5.7m波长整数倍时,测角精度会明显降低。其中2m情况符合测姿原理,5.7m可能由于处理过程或其它原因使测角精度出现降低的现象。因此,应用中尽可能是基线长度大于2m(4~8m最好)和避开波长的整数倍。
2.3.2 动态试验数据分析
2009年上半年,在某运输机上安装了测姿型GPS系统,利用其实际飞行试验数据,对原始测量数据进行了信息复原与分流,得到了相对GPS主副天线的各自的测量数据,仿照独立GPS接收机测姿数据处理方法,应用商业化GPS后处理软件处理得到了飞机航行中每个时刻的主副天线基线长度及飞机的航向角,并与实际主副天线基线长度值及同时测量的高精度平台惯导系统测姿数据(直线段)进行比对,以检验GPS测姿的可行性和测姿精度。具体数据比对时,选用的GPS动态相对定位处理结果的品质因数Q均在2以内。统计结果如表2所示:

表2 动态GPS姿态测量与惯导姿态测量比对残差
2.3.3 试验结果分析
通过以上精度分析和与惯导系统测姿数据的残差比对结果:
一是静态姿态测量中测角精度达0.1°以内 ,基线长度对测角精度的影响符合测姿原理,随基线的增大而测姿精度提高,但基线长度为波长整数倍时精度变差,应同时注意。
二是动态试验中同惯导系统测姿数据的残差比对总误差只有0.144°。由此可见,GPS测姿用于航天测控设备精度鉴定试验完全可行,其精度可以达到0.2°以内(直线航路),较电子罗盘正常工作时测姿精度2°提高了一个数量级,可有效提高鉴定试验中目标不一致修正精度,且不受外界的影响,具有全天候、性能稳定、测姿精度高等特点。
2.4 试验任务应用情况
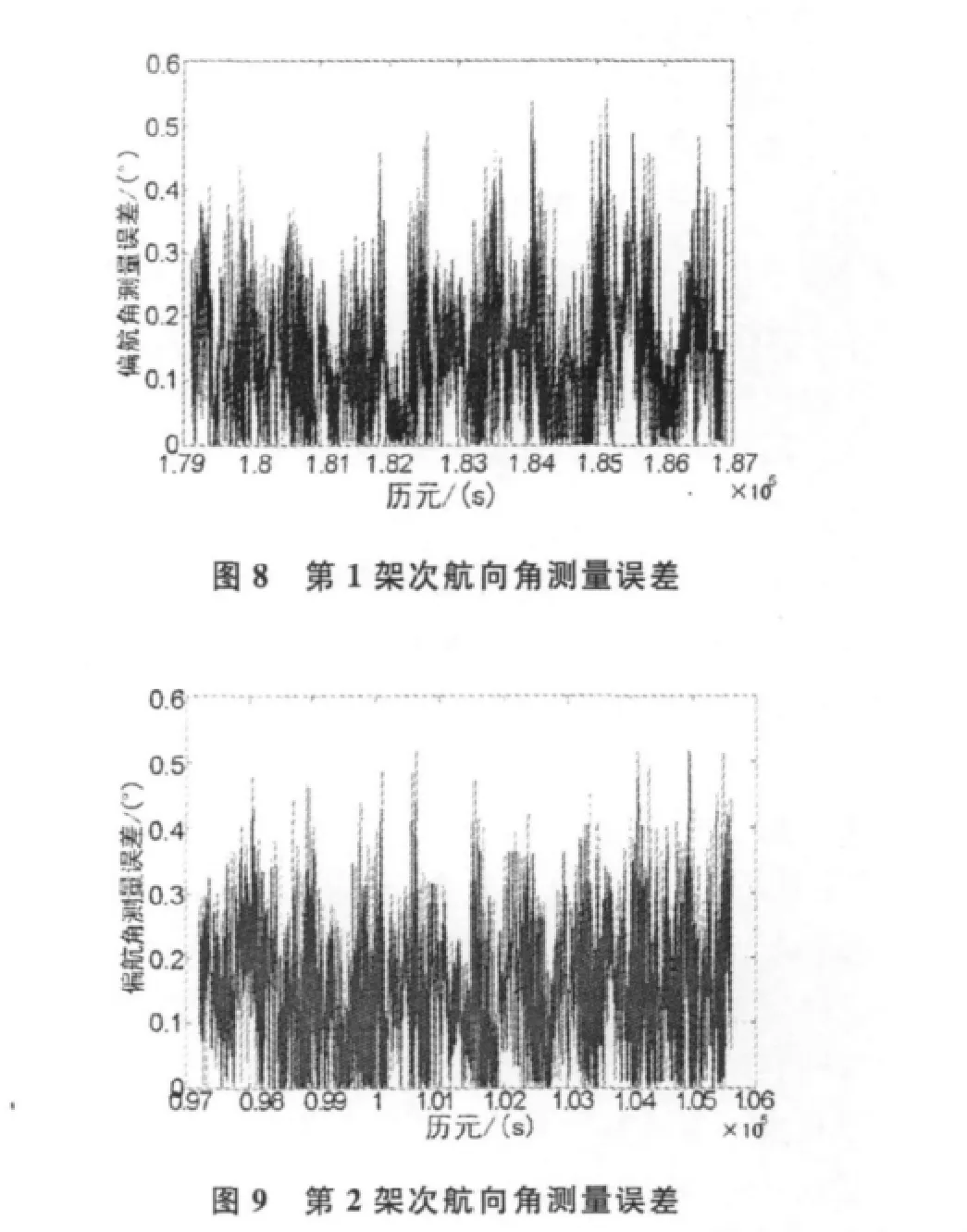
在2010年5月某靶场多地综合校飞试验中,使用飞机在其机背上安装两台高动态RTK双频GPS接收机,以求得飞机两维姿态方位角和俯仰角。由于安装受到飞机背部可用安装位置的限制,使主、副GPS接收机天线安装构成的基线与飞机的中轴线不可能平行,因此,通过大地测量进行了精确的标校,以便数据处理时进行姿态角的修正,而得到准确的飞机姿态。具体情况:主副接收机天线相距2.049m(应用中4m到8m较为理想),采样率10C/S,卫星载止角15°,品质因数Q在2以内,航路设计为南北走向的直线航路,共进行了5个架次的数据的处理。以下是依据大地测量标校主、副接收机天线相位中心测量数据2.049m为基准,按照式(1)测姿精度公式,对结果进行了误差统计、分析,统计误差如表3所示,给出了第1、2两个架次测量估算误差曲线,如图8、9所示。
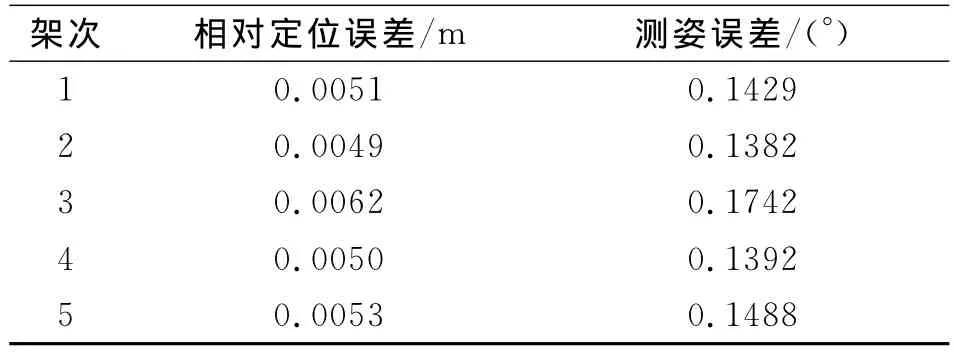
表3 动态GPS姿态测量估算误差
3 结 论
通过大量的试验数据分析、研究和实际任务应用验证,利用两台GPS接收机配以专业的实时/事后处理软件组成外测设备精度鉴定测姿系统,能够满足试验任务的要求。其方法可行,安装方便灵活、性价比高,测姿精度优于0.2°,较电子罗盘的测姿精度提高了一个数量级。GPS测姿技术在测控系统精度鉴定中的成功应用,开创了GPS应用的新领域,典型的组成方法将在相关试验和工作中得到推广和应用。
[1]刘丙申,刘春魁,杜海涛.靶场外测设备精度鉴定[M].长沙:国防科技大学出版社,2008.
[2]周朝猛,王 珏.GPS姿态技术在测量船上的应用初探[C]//空间定位技术应用研讨交流会论文集,2003.
[3]刘俊承 .GPS姿态确定技术研究 [D].华北工学院硕士学位论文,2002.
[4]张守信.GPS卫星测量定位理论与应用[M].国防科技大学出版社,1996.
[5]赵健康.利用GPS载波相位快速确定动态载体姿态及精度分析 [J].国防科技大学学报,1999,21(4):114-117.
[6]隋立芬,宋力杰.误差理论与测量平差基础[M].北京:解放军出版社,2004.
