多普勒全场测速技术中图像及数据处理
2011-08-02何春生张洪军王天宇
何春生,张洪军,王天宇
(中国计量学院 计量测试工程学院,浙江 杭州 310018)
出现于上个世纪90年代的多普勒全场测速(Doppler global velocimetry-DGV)方法是一种基于分子滤波原理来测量流场流速的技术.DGV系统中选用与分子吸收曲线相匹配的窄线宽激光.测量过程中,对经过分子滤波器后的流场散色光进行采集,流速引起的散射光频移体现在经过分子滤波器后的光强变化上,即通过分子滤波器将频移信号转化成光强信号,从而可以进行流场的速度测量.DGV在高超和大尺度风洞测量方面优势明显[1-4].
DGV技术最早在1991年由Komine等人开始研究[5,6].在1996年,McKenzie等人对实验激光进行了改进,采用脉冲激光进行实验[7].1997年,Clancy等人采用两个激光面测量平面速度[8].其后,欧洲风洞联合会、美国以及欧洲的多所大学都进行了这方面的研究[9,10],并将这一技术广泛的应用到风洞和发动机测试方面.国内DGV研究工作起步较晚,中国计量学院科研小组已经取得初步进展[2].
DGV技术对光强信号的检测有两种方法.一种是采用光电倍增管阵列来测量,这种方法响应速度快,但对流场的测量分辨率不够高.另一种是采用CCD相机采集流场的散射光信号.无论哪种方法,其图像和数据处理方法原理是相同的.本文针对采用CCD相机的DGV图像和数据处理方法进行研究,以期获得相关解决方案.
1 DGV的测量原理
DGV通过测量流场中运动粒子散射光的多普勒频移来测量速度.当激光经过流场被运动粒子散射时,会产生多普勒频移,发射光和接收光的频差Δf可以根据多普勒频移公式求得[4]:

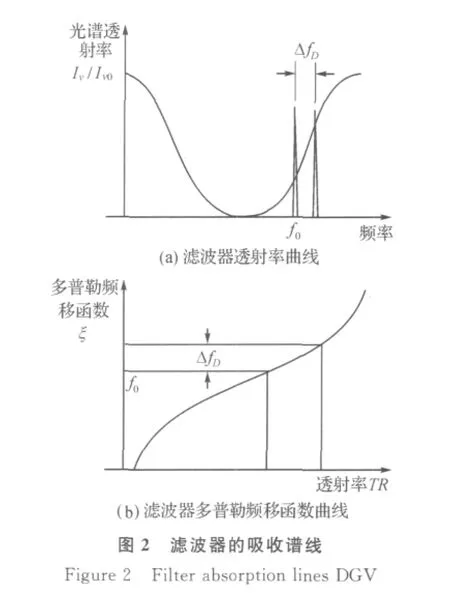
如图1,DGV使用片光来照亮流场中的某一平面,流场的散射光通过分光镜分成两条光路,一路经过分子滤波器被信号相机接收,另一路直接被参考相机接收.分子滤波器内装有吸收分子,吸收分子具有能够和激光光谱相匹配的吸收带.该吸收带能够形成一条具有有限长度斜边的透射率曲线(图2(a)),通过滤波器的光谱强度和光的频率有关是分子滤波器的光谱透射率,Iv定义为通过滤波器后的光谱强度,I0v为滤波器之前的光谱强度.通过滤波器的光谱强度是散射光的光谱强度与滤波器分子吸收线的卷积.信号相机的每一个像素记录了积分光谱强度,I=∫Ivdv,积分限取决于相机和光学系统的光谱感光度.参考相机采集了未通过滤波器的流场图像,即未经滤波器的积分光谱强度I0(I0=∫I0vdv).图2(b)是图2(a)的反函数,在实验过程中,选取一个基准频率f0,其它频率都相对于基准频率可以建立多普勒频移函数ξ与透射率TR之间的关系.这样粒子移动引起的多普勒频移就可以通过信号图像与参考图像光谱强度的相对变化得到,而示踪粒子运动速度可以由频移计算出.

在DGV系统中使用两台CCD相机,一台相机经过碘池来采集图像,称之为信号相机,所采集的图像称之为信号图像.另一台相机不经过碘池采集图像,称之为参考相机,相应的图像称之为参考图像.整个图像处理过程包括背景去除、灰度修正和几何校正三个部分.
1.1 背景去除
为了保证图像每个像素点上强度测量的准确性,除去实验过程中进入相机的非有效光,一般需要把背景图像采集出来,在图像处理的过程中减去背景图像.信号图像和参考图像分别记为SD和RD,信号背景图像和参考背景图像分别记为SB和RB,S′D和R′D分别记为去除背景后的信号图像和参考图像:
图3显示了背景去处的效果.

图3 图像的背景去除Figure 3 Background removal of images
1.2 灰度修正
DGV系统中,到达两台CCD相机的光路不同,另外,两台相机本身的感光度不同,使得信号图像和参考图像在灰度值上产生了一定的偏差.常用的方法是采用灰度修正的方法来修正这一偏差.具体操作是将激光频率调谐到碘池的吸收曲线以外,两台相机分别采集流场的图像,记为SG和RG,同样设置下的背景图像记为SB和RB,去除背景后的灰度修正图像为:
将两幅灰度修正图像上对应像素点的比值记为灰度修正系数k,即k=R′G/S′G,将需灰度修正的图像在对应像素点上乘上对应的灰度修正系数.修正效果,如图4.
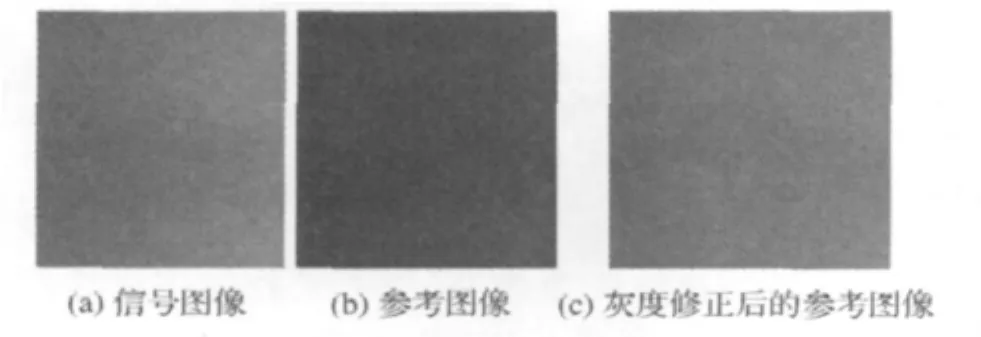
图4 图像的灰度修正Figure 4 Gray scale correction of images
图4显示,信号相机和参考相机对同一对象的图像存在明显的明暗差异.将图像(b)进行灰度修正后,效果如(c),(c)图灰度基本上与(a)保持一致.
1.3 几何校正
到达两台CCD相机的光路不同不仅影响到相机图像的灰度,而且造成两台相机对同一对象所采集的图像在几何形状上出现差异,为保证两幅图像在像素点上一一对应,必须对两台CCD相机所采集的图像做图像上的几何校正.通常将所有图像都绘制在一个对应于实际流场的图像中.将一个有标准尺寸的黑白方块相间的纸板(靶板)放在测试区域内,供每一个相机拍摄图像,靶板上的黑白方块的交接点为图像和实际尺寸的流场提供了一个纽带.将这些需要校正的图像进行数字化处理,可以创建了一个坐标系(xi,yi).対实际流场建立一个相对坐标系(x′i,y′i).两者之间的关系为[1]:

式(4)中,系数ai通过求解两组联立方程来确定,这些方程是通过靶板区域和实际流场的四个角建立起来的.方程式为:
上述式子中,点(x′i,y′i)和(xi,yi)是已知的结点,(x′,y′)是需校正图像中点(x,y)在实际流场中的位置,一般不是整数.因此,映射图像点的灰度赋值是最接近的四个像素点的加权平均值.这种双线性插值法一般分段用于以每个方块为边界的区域中.映射系数通过靶板图像确定后,将用来映射所有数据图像.几何校正前后的效果,如图5.
1.4 速度计算
完成了以上三部分图像处理后所产生的新的图像为S″D、R″D、S″G和R″G,这些图像中透视扭曲和放大倍率的差异已经被去除.这样可以得到每个像素点上的透射率,TR:

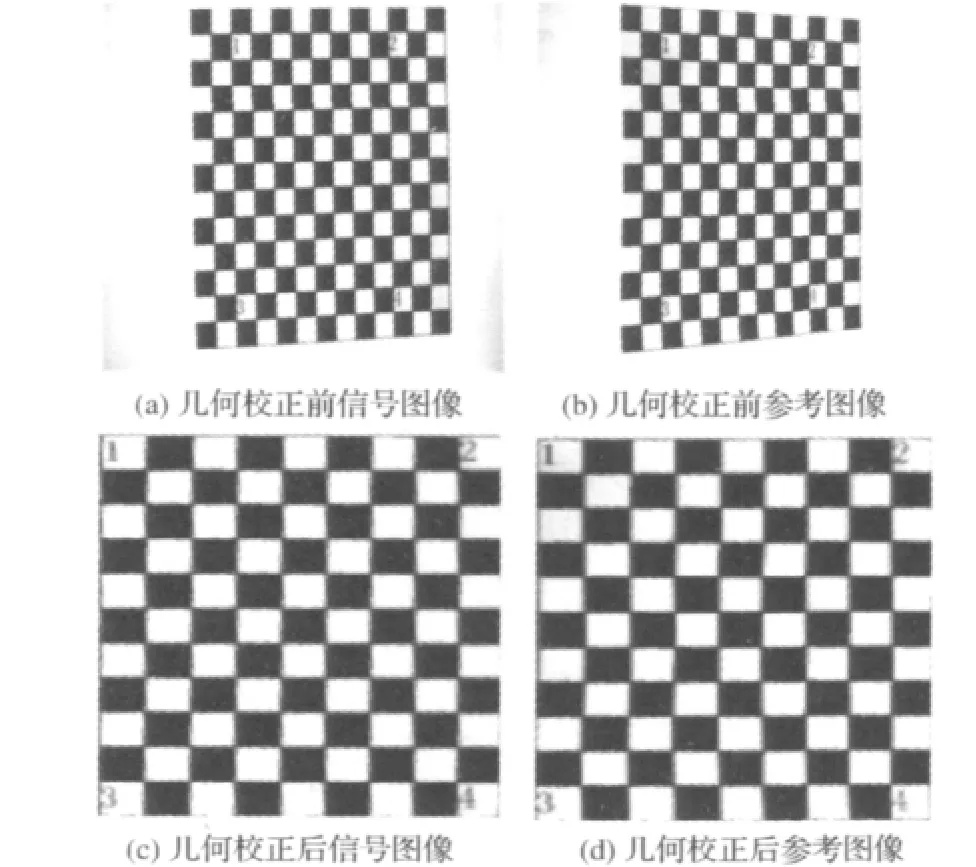
图5 图像的几何校正Figure 5 Geometric correction of images
其中,k=R″G/S″G为灰度修正系数.已知某个像素点上的透射率TR就可以确定接收光的频率ξ(TR),由多普勒频率转换速度公式可以计算出速度:
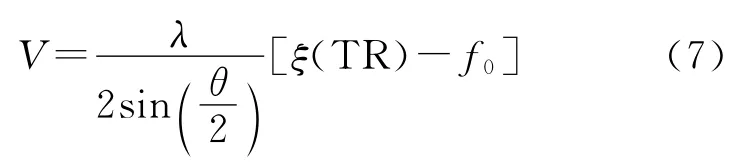
式(7)中f0是由系统监测到的激光频率,θ为激光入射方向和散射方向的夹角,ξ(TR)-f0为频差Δf.
2 实验测试
2.1 DGV实验测试系统
图6为DGV实验测试系统示意图.这个系统包括激光器、片光源光学设备、大小碘分子滤波器、CCD相机、辅助光学器件和转盘测试对象等.激光器发射一束激光,经过分光镜进行分光,大部进入流场用于速度场的测量,一小部分通过小碘池用于激光频率监测.CCD相机分别采集过碘池和不过碘池的流场散射光的图像.再将图像传输到计算机中进行处理.
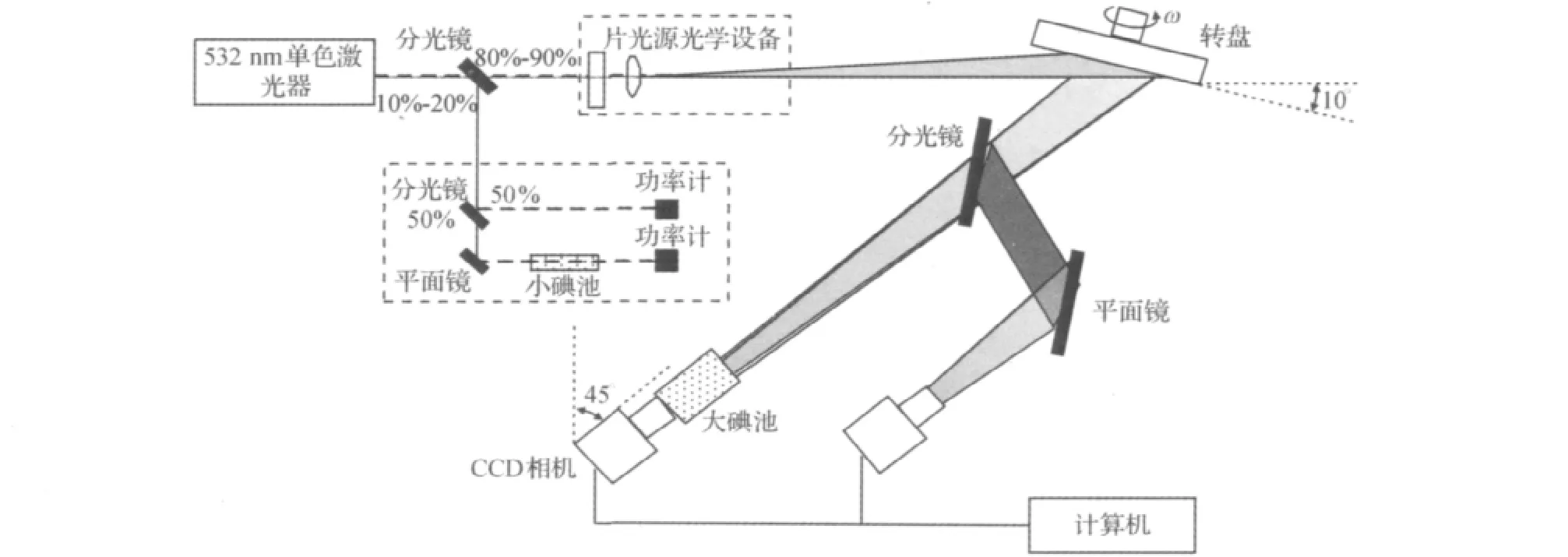
图6 实验测试系统Figure 6 Experimental system of testing
1)激光器
DGV技术对激光线宽、频率稳定性要求都很高.本系统中使用的是型号为SSLM-532-50的半导体激光器,该激光器能够产生一束波长为532nm的连续激光,线宽小于1MHz,最大输出能量为50mw.通过温度控制来改变激光的频率,温度调谐范围大约为30GHz.
2)碘分子滤波器
碘分子滤波器也称之为“碘池”,是由石英玻璃制成内部装有碘蒸气的圆筒,圆筒的两侧加上光学玻璃窗口.大碘池直径为75mm,长度为150mm.小碘池直径为25mm,长度为120mm.圆筒主体部分用电热丝缠绕加热,并用隔热胶带作绝热处理,保持圆筒主体温度在340-380K之间恒定,目的是保证圆筒两侧的窗口上不出现碘晶体.对滤波器筒体的温度控制精度为0.1K.对于从筒体主体上伸出来的冷指端,温度需要保持在310-325K之间,采用TEC对其温控.由于滤波器的冷指端的温度对吸收曲线的影响较大,其温度控制精度需要精确到0.01K.
3)CCD相机
实验中所采用的相机是JAI公司生产的型号为BM-141灰度相机,相机信噪比优于58分贝,有效像素为1392×1040.可以存储8、10和12位的图像,本文采用的是8位存储.
4)转动圆盘
转盘采用的是半径为10cm,最高转速到3500r/min的转动圆盘,转速采用数字显示.
2.2 DGV的数据处理
2.2.1 分子滤波器透射率曲线的标定
碘池的吸收曲线采用两个功率计测量.激光经过分光镜后,光路变成两条,一条经过碘池被功率计接受,能量记为E1(f),另一条不经过碘池被功率计接受,能量记为E2(f).假定吸收井外一点测得两个能量为E1(f0)和E2(f0).则某个频率f下的透射率记为[2]:

频率扫描得到碘池吸收曲线,结果如图(7):
从图7中,可以看出实验测得碘池吸收曲线光滑.选取吸收斜边上的6个点进行一次拟合后,效果如图7(b),拟合结果为:

式(9)中,TR表示像素点上的透射率,f表示透射率对应的频率.实验中选取基准频率f0,则f-f0为频差Δf,通过式(7)可以计算出速度.
2.2.2 转盘的速度测试
测量流场速度的实验采用半径为10cm,转速为0-3500r/min的转盘来测试.测试区域,如图8.图中标示的矩形区域就是实验的测试区域,矩形的长度L=5cm,宽度为2cm.矩形下端距转盘圆心为R0=3.5cm.在激光照亮的实验区域上切(横)向上的点做平均处理,径向未做多点平均,结果如图9所示.图9中给出了2000r/min到3500r/min四个转速下速度V与半径R之间的关系,同时也给出了实际速度以便于比较.结果显示转盘线速度的测试结果与实际速度基本吻合,径向不同位置上所测速度存在较大偏差,这主要来源于像素点的对正误差,如果进行径向多点平均,该误差可以减小.沿半径方向上紧邻的三个速度值进行平均后,得到图10的结果.可见,进行多点平均后,所得速度与实际速度吻合性更好,速度的最大示值误差变小.表1给出了图9和图10中数据所对应的速
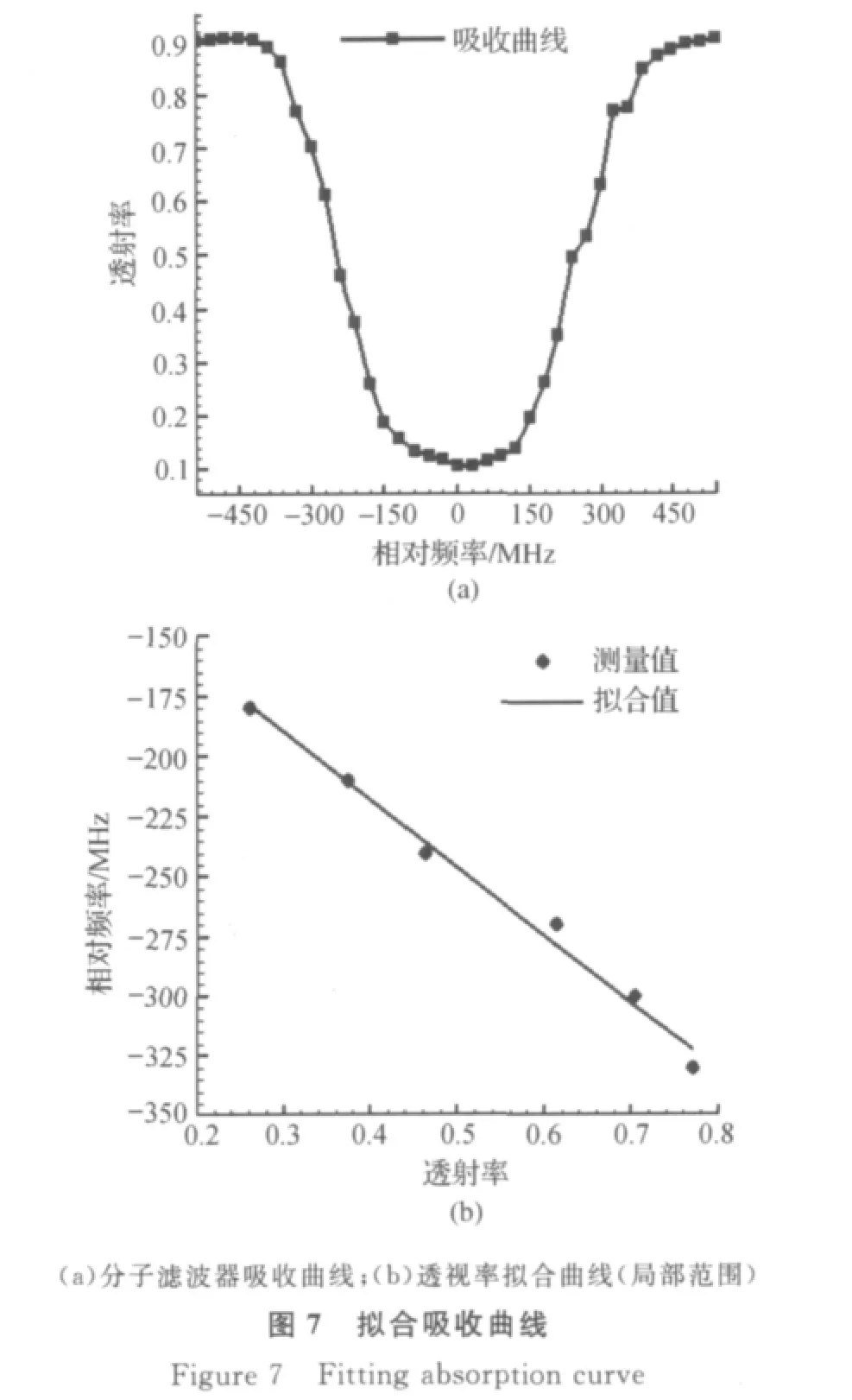

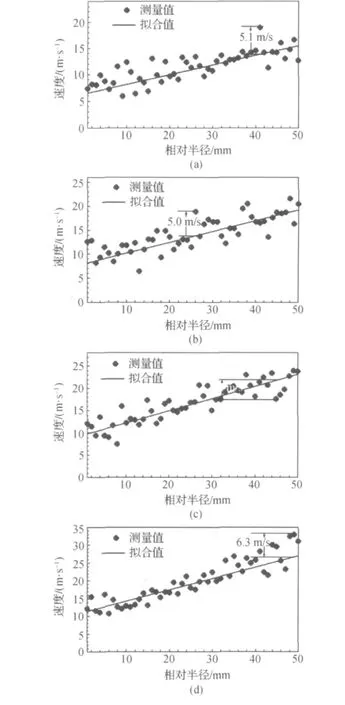
图9 转盘实验(径向未做多点平均)Figure 9 Experiment of disk(without radial average)
度偏差的均方根值

式(10)中Vm为i点的测量速度,Va为i点的实际速度.
可以看出,在进行多点平均后,对正误差影响得以减小,测量误差明显减小.
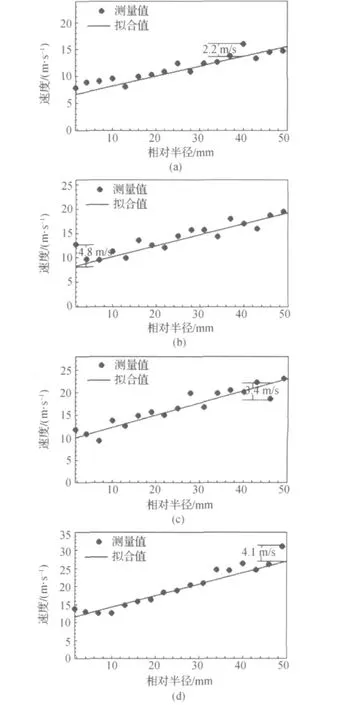
图10 转盘实验(径向做多点平均)Figure 10 Experiment of disk(radial average)
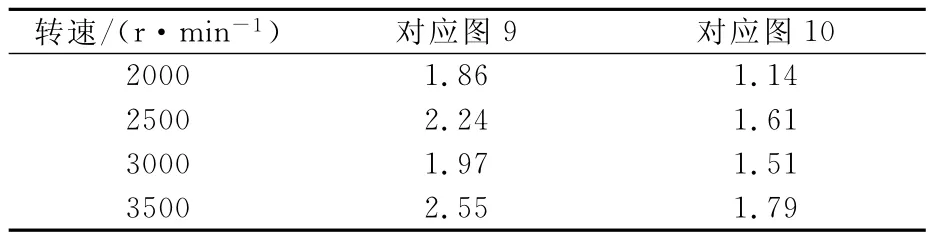
表1 测量速度偏差的均方根值ΔVrms/(m·s-1)Table1 RMS of measuring velocityΔVrms/(m·s-1)
3 结 语
本文进行了DGV技术图像处理和数据后处理方法的研究.对背景去除、灰度修正和几何校正等图像处理过程进行了分析并给出了处理方法.应用所得方法对DGV转盘速度测量实验图像进行了处理分析,结果显示测量速度与实际速度吻合较好;另外,像素对正误差对于局部速度测量值有较大影响,而采用多点(多像素)平均后,对正误差影响得以显著减小.
[1]张洪军,吕 进.多普勒全场测速技术的进展[J].力学进展,2007,37(3):428-442.
[2]张洪军,何春生,赵晓东,等.多普勒全场测速系统实现[J].仪器仪表学报,2010,31(增刊):119-122.
[3]BOGUSZKO M,ELLIOTT G S.Property measurement utilizing atomic/molecular filter-based diagnostics[J].Progress in Aerospace Sciences,2005,41:93-142.
[4]ELLIOTT G S,BEUTNER T J.Molecular filter based Doppler velocimetry[J].Progress in Aerospace Sciences,1999,35:799-845.
[5]KOMINE H,BROSNAN S J.Instantaneous,three-component,Doppler global velocimetry[J].Laser Anemometry,1991(1):273-277.
[6]MEYERS J F,KOMINE H.Doppler global velocimetry:a new way to look at velocity[J].Laser Anemometry,1991(1):289-296.
[7]MCKENZIE R L. Measurement capabilities of planar Doppler velocimetry using pulsed lasers[J].Applied Optics,1996,35:948-64.
[8]CLANCY P S,SAMIMY M.Two component planar Doppler Velocimetry in high speed flows[J].AIAA J,1997,35:1729-38.
[9]LAWSON N J.The application of laser measurement techniques to aerospace flows[J].Proc Instn Mech Engrs,2004,218:33-57.
[10]THUROW B,JIANG N,LEMPERT W,et al.Development of megahertz rate planar Doppler velocimetry for high speed flows[J].AIAA J,2005,43(3):500-511.
