基于GPS的虚拟应答器在调车监控系统中的应用
2011-07-30梁前浩
梁前浩 薛 峰
*卡斯柯信号有限公司 工程师,100044 北京
随着铁路列车运行速度的提高和运能需求的增加,调车作业的安全问题越来越引起关注。调车作业的安全防护不仅关系着列车运行的安全,而且直接影响列车编组计划的执行、列车运行图的实现、以及车辆周转等。目前,用于调车作业安全防护的无线调车机车信号和监控系统,都采用应答器作为定位设备。这需要改造站场,在调车作业站场大量铺设地面无源应答器。由于应答器设备成本较高,且需要专人定期维护,应答器的大量使用无疑增加了系统的建设及维护成本,并且给管理维护人员带来额外负担。
近年来,随着卫星导航技术的不断发展,其导航定位精度、可用性都大大提高。以GPS系统为例,GPS卫星的现代化和新型GPS卫星的运行,其在轨运行的卫星数也由24颗增加到32颗,每个轨道面有高达5~6颗卫星,它们沿平面不均匀分布,可提供冗余的覆盖,从而提高了定位精度和星座鲁棒性。此外,GPS卫星性能大幅提高,目前即使不使用差分技术,GPS的定位精度也能达到3 m(95%)。若采用差分技术,GPS的定位精度将进一步提高。
1 系统原理
采用虚拟应答器方案的调车监控系统模拟了地面无源应答器的定位方式。虚拟应答器对于调车监控系统车载主机来说是一个外部设备,它模拟安装在机车上的应答器设备以及安装在轨道上的无源应答器。当调车机运行到轨道上预先设定的虚拟应答器数据点并且GPS工作正常时,虚拟应答器就向车载主机发送一个应答器数据包,这个数据包与实际应答器查询主机发送的数据包相同,车载设备通过虚拟应答器信息确定位置。
系统设计中采用组建局域差分增强系统的方式提高GPS定位精度。局域差分系统由地面基准站、数据播发链路和车载部分组成。根据对精度的不同要求,可选用码差分和载波相位差分等不同差分增强方案:码差分精度可达到亚米级,载波相位差分精度可达到厘米级。局域差分增强系统原理如图1所示。
地面基站:在已知坐标的固定点上架设基准站,基准站连续跟踪观测GPS卫星,利用已知测量位置对误差进行估计产生RTCM修正数,并把校正信息通过数据链路发送给车载设备。
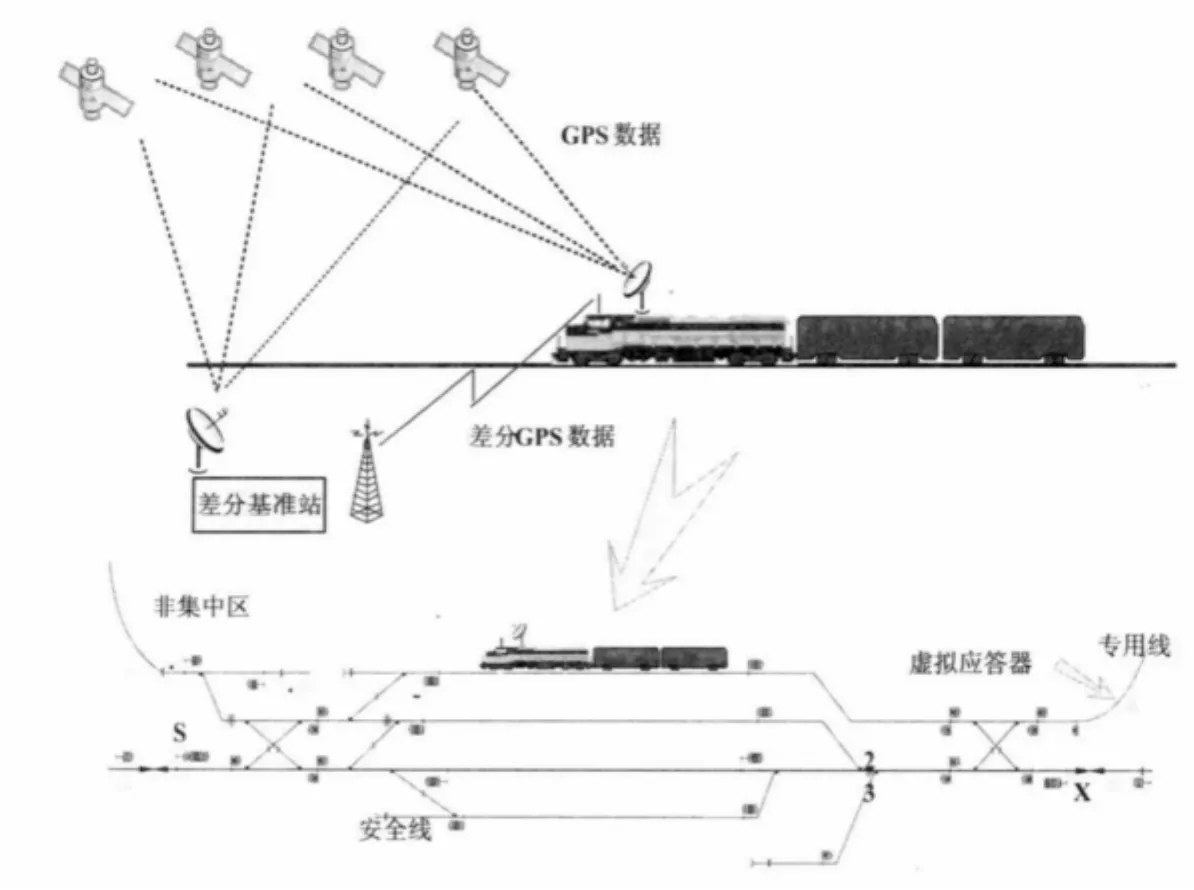
图1 调车监控系统局域差分系统原理
数据播发链路:系统复用调车监控系统中既有的车-地数传电台通道播发差分修正数据。
车载部分:车载主机接收由地面基站发送过来的差分数据并转发给虚拟应答器定位模块,GPS接收机利用差分数据对自己的定位数据进行修正解算,提高定位精度。
单一基站提供的修正信息的有效范围为10~100 km,足以覆盖车站调车作业范围。
2 虚拟应答器设计
2.1 虚拟应答器结构
虚拟应答器采用模块化结构,这种模块化结构可以实现结构和功能分离。虚拟应答器包括:定位模块、安全判别模块、报文处理模块以及通信模块。虚拟应答器结构如图2。
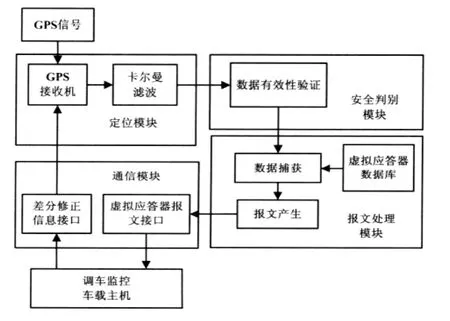
图2 调车监控系统虚拟应答器结构图
1.定位模块。定位模块接收GPS信号和差分修正信息,实时计算定位数据,并对数据进行卡尔曼滤波处理。定位数据经卡尔曼滤波后传递给安全判别模块。模块化的设计可根据不同的应用环境、技术指标,选择不同的接收机。
2.安全判别模块。安全判别模块对定位数据的精度进行估计,对于不满足系统精度要求的定位数据,认为是无效数据,予以剔除,从而保证定位数据的精度满足设计指标。有效的定位数据可将定位信息传递给报文处理模块。
3.报文处理模块。报文处理模块根据设计的数据捕获规则对定位数据进行处理,判定是否为压中虚拟应答器。此模块实时生成设备状态报文,如果压中虚拟应答器,则提取相关虚拟应答器信息,生成应答器数据报文。
数据校验规则根据不同的应用环境来设置“组校验方式”、“区域校验方式”,保证输出信息的可靠性和安全性。定位数据捕获设计为当数据满足设定的捕获判决后,在距离当前虚拟应答器点最近的地方,捕获前方虚拟应答器信息。
数据报文生成格式根据虚拟应答器数据库和报文产生规则进行设置,格式完全符合现有应答器报文标准。
4.通信模块。通信模块通过串口与车载主机连接,一方面接收车载主机转发的差分修正信息,并将其提供给定位模块的GPS接收机;另一方面向车载主机发送应答器数据包。通信模块每200 ms发送一次设备状态数据,当压过虚拟应答器时,向车载发送应答器数据报文。
2.2 软件流程
调车监控系统虚拟应答器软件流程图见图3。
3 定位精度
GPS水平定位精度可表示为水平精度因子和伪距误差因子之积。伪距误差因子取决于伪距和载波相位测量值以及广播导航数据的质量,其等效误差可以近似表示为均值为零的高斯随机变量,其方差由每个分量差之和来确定,采用距离均方根 (DRMS)描述。因此GPS水平定位精度可用以下公式来表示:
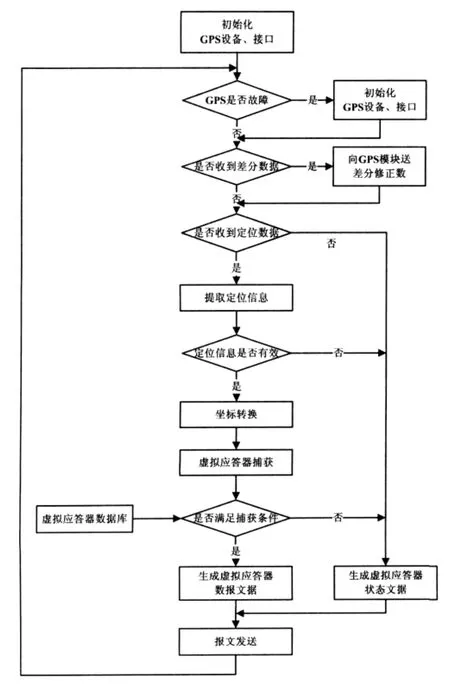
图3 调车监控系统虚拟应答器流程图

其中:HDOP是水平精度因子,表示卫星/用户的相对布局对误差的影响;σURE是伪距误差因子。
选取全球平均HDOP=1.0,单点测量的伪距误差估计σURE=0.36 m,差分测量的伪距误差估计σURE=1.4 m。单点、伪距差分水平定位精度估计如表1。
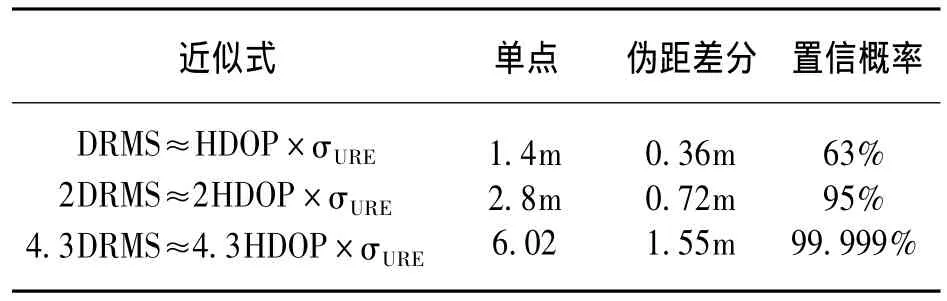
表1 单点、伪距差分水平定位精度估计
选用单频GPS接收机进行单点定位静态12h实验,伪距差分静态定位12h实验。实验结果见表2。
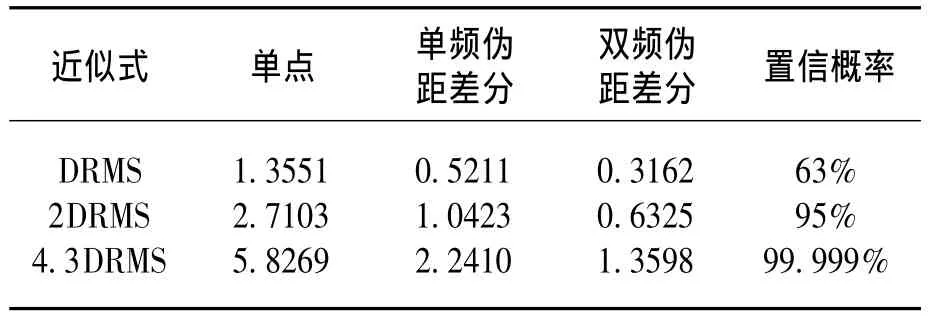
表2 单点、伪距差分定位精度实验结果
从定位实验的结果来看,通过组建局域差分增强系统,GPS定位精度得到有效提高,实验结果也符合单点、伪距差分水平精度估计。根据铁路技术管理规程的规定:客货共线铁路站内铁路线间距应大于4.6 m,也就是说单频GPS伪距差分定位精度:2.2410 m,99.999%,满足定位精度要求 (<2.3m,99.999%)。双频GPS伪距差分定位精度优于系统定位精度要求。在具体实施过程中可以根据现场实际情况选配不同特性的定位设备以满足现场的特定需求。
4 结束语
在调车监控系统中,车列初始定位及位置跟踪技术的选择直接决定了系统对调车作业的安全监控水平,利用卫星导航技术实现的虚拟应答器定位方案代替目前普遍采用的无源应答器方案,在降低系统建设和维护成本的同时,进一步提高了系统的控制精度、拓宽了系统的应用范围,对调车监控系统的推广和应用有着积极的意义。
虚拟应答器方案已在多个车站投入了实际应用,效果良好,深受用户欢迎。
[1]铁道部.无线调车机车信号和监控系统技术条件(暂行).2004.
[2]Elliott D.Kaplan and Christopher J.Hegarty.寇艳红译.GPS原理与应用[M].第二版.北京:电子工业出版社,2007:224-345.
[3]张雅静,王剑,蔡伯根.基于GNSS的虚拟应答器研究[J].铁道学报,2008,30(1).
[4]刘基余.GPS卫星导航定位原理与方法[M].北京:科学出版社,2003.
[5]张夫松,宋宇博.GPS在机车调车监控系统中的应用研究[J].兰州交通大学学报,2004,23(4).