双绕组永磁同步电动机冗余控制与故障分析
2011-07-20张东宁
沈 蕾,孙 伟,钱 儿,王 真,张东宁,陈 兰
(中国电子科技集团公司第二十一研究所,上海200233)
0 引 言
永磁同步电动机系统以其体积小、效率高、控制精确等优点已经在许多领域得到应用。但一些可靠性要求高的场合,要求电机系统具有更高的可靠性。提高电机系统可靠性成为研究热点之一。
本文介绍一种基于双绕组永磁同步电动机的控制策略,在电机及控制器部分通道发生故障后仍能完成任务,使系统的可靠性大大提高。
1 电机结构
本文控制对象为一种新型结构永磁同步电动机[1],作为两轮平台电动车的主要动力驱动电机使用。该电机的突出特点是体积小(Φ66 mm×90 mm)、输出功率大(总输出功率达到1 500 W)。电机结构及绕组示意图如图1所示。电机采用双绕组的冗余设计,提高了系统的可靠性;定子部分采用整体封装的形式,减少了传统电机的前后端盖;转子部分采用不等气隙的永磁体,有利于产生正弦波磁场;位置传感器使用线性传感器元件,结构简单,便于安装。
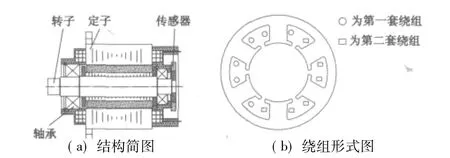
图1 永磁同步电动机简图
2 控制策略
2.1 控制方案
双余度永磁同步电动机控制系统[2-3]框图如图2所示。
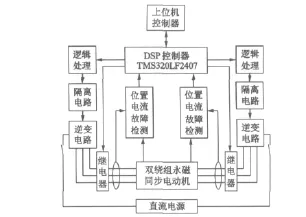
图2 双余度永磁同步电动机控制系统框图
系统采用一个TMS320F2407作为系统的主控芯片,TMS320F2407包括两个功能完全一样的事件管理模块EVA和EVB,两发事件管理模块各包括两个定时器和带死区的PWM输出,能够满足电机双绕组控制的需要。本系统针对电机的位置传感器、隔离电路、逆变电路及绕组等故障点做了冗余设计。
在控制系统硬件设计的基础上,采用永磁同步电动机矢量控制的方法对电机实行精确控制。矢量控制以磁场定向控制为基本原理,通过速度反馈、电流反馈等构成速度环、电流环,实现双闭环控制,以维持系统运行速度的稳定性、电流响应的快速性。双冗余永磁同步电动机矢量控制系统的原理框图如图3所示。
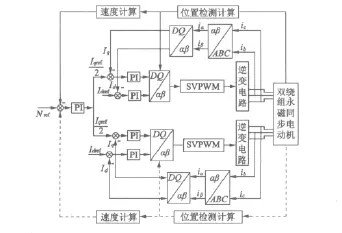
图3 双绕组永磁同步电动机矢量控制系统原理框图
本系统采用热冗余工作模式,即电机正常工作时,两套绕组同时通电产生转矩。由于在电机加工中,两套绕组的电磁性能不能达到完全一致;逆变电路的功率器件之间管压降也存在差异,所以在两套绕组上加相同幅值的电压矢量容易引起绕组电流的不平衡[4]。电机采用id=0的控制方式,所以iq=is,则电机的额定电磁转矩:

此时电机的铜损:

从式(1)和式(2)中可以看出,电机的铜损和各套绕组电流的平方和成正比关系,而电机的转矩与两套绕组电流之和成正比关系,所以当输出额定转矩时电机的铜损随着两套绕组的电流变化而变化的。表1为额定负载下电动机铜损分析,表中数据为标幺值。
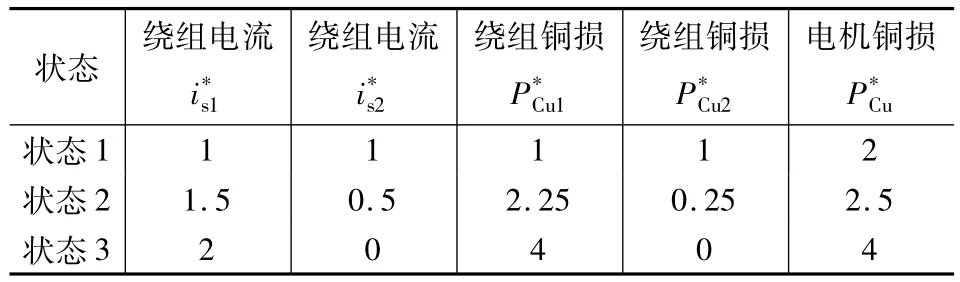
表1 不同电流下电动机的铜损耗
由表1分析可知,当两套绕组电流平衡时,铜损达到最小值。随着绕组电流差别变大,铜损也变大。铜损是电机发热的主要因素之一,电机过热将引起电机绝缘性能下降甚至烧毁绕组。因此,在控制中采用图3的电流分配方法,由速度环计算所得的电流给定值平均分配个两套绕组,作为绕组的电流给定值,使电机在相同出力的情况下铜损达到最小。
2.2 冗余运行分析
当电机一套绕组发生故障后,另外一套绕组要单独运行。如果此时电机还需要输出额定转矩,则工作绕组需要通额定电流的两倍,此时电机上的铜损如表1中状态3。若单绕组工作时不允许铜损增加,可以使工作绕组的铜损等于电机额定工作时的铜损,则可得:

式中:iN为电机正常工作时一套绕组的额定电流值,则电机额定转矩TeN=2KeiN。可得is=,则单套绕组工作时在铜损不变情况下允许的电磁转矩:

由此可知,如果要使电动机在单绕组工作时铜损不增加,则只能出额定力矩的70%。
如果要求单绕组长时间运行、能够输出额定转矩,则电机设计时需要做降额设计。
3 故障检测及冗余控制
电机绕组与逆变电路连接图如图4所示。

图4 电机绕组与逆变电路示意图
3.1 逆变电路断路故障[5]
根据图4分析,逆变电路断路故障可分为单管断路和两管断路。当单管断路时,假设T1断路,则绕组A中只能检测到反向电流;若T4断路,则绕组A中只能检测到正向电流;若T1和T4同时断路,则绕组A中没有电流。所以我们可以根据检测到的绕组电流情况判断出是否发生故障。如果发生断路故障,电机会有较大的转矩脉动,则应通过软件变换,将电机切换到单绕组工作模式。
3.2 逆变电路短路故障
控制器对母线电流有采样及硬件过流保护功能。假设T1发生短路,则当控制信号开通T4时,母线电压通过T1和T4形成短路回路,此时过流保护电路发出过流信号,控制器立即对控制信号进行封锁,暂时停止过流部分电路工作。为了防止干扰引起的误动作,对过流电路重复通电三次,当连续三次发生过流时,判定为发生逆变器短路故障。此时需要切断故障部分电路,即切断图4中的k1和k2。
3.3 电机绕组断路故障
当电机绕组发生断路故障时,故障检测与逆变电路上下功率器件同时断路相同,即断路绕组无电流。
3.4 电机绕组短路故障
电机绕组短路可分为两种情况,当发生严重匝间短路或者相间短路时,短路绕组将发出大量热量,这时加装在电机上的温度传感器将发出电机过热信号,电机停止工作。
电机正常工作时,绕组电流:

当发生匝间短路时,则该匝线圈所感应出的反电势在该匝内形成环流,短路匝电流:
一般反电势都为外施相电压的85% ~95%,所以短路匝电流为正常电流的5.7~19倍。可见短路线圈也会快速发热,并最终造成烧毁。当电机匝间短路达到一定值时,由于短路绕组的影响,母线电流会产生周期性的脉动,因此需要检测母线电流。当母线电流出现周期性的脉动时,则判定电机匝间短路,此时电机应该停止工作。
3.5 位置传感器故障
电机采用两套线性霍尔元件作为位置传感器,每套传感器的三个霍尔相隔120°电角度安装。由于线性霍尔感应到得是正弦波,则对三个霍尔传感器进行模拟采样所得值相加应该为一个常数,当采样得到的值相加超出该值一定范围(考虑到模拟采样干扰问题),则判定该套传感器故障,同时换用第二套传感器作为位置传感器。
3.6 冗余运行
电机系统正常运行时两套绕组都通电流,进行热冗余运行;当控制系统发生短路或者断路情况以及电机绕组发生断路情况时,电机系统进入单套绕组运行;当电机绕组发生短路故障时,电机系统停止工作。图5为电机正常工作切换到单绕组冗余运行的相电流对比。
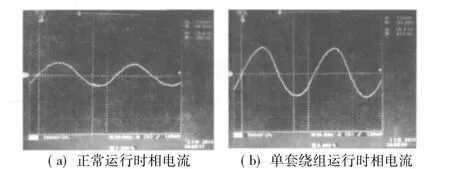
图5 电机波形照片
4 结 语
电机驱动系统在军用和民航等多种领域的广泛应用,使得可靠性问题成为了相关领域学者关心的重要问题。因此,研究具有高可靠性和高功率密度的电机系统具有非常重要的现实意义。本文在分析了双绕组永磁同步电机基本结构特点的基础上,对该电机的单DSP冗余控制系统进行了分析研究,取得了如下的研究成果:
(1)电机系统正常运行情况下两套绕组电流分配问题;
(2)电机系统发生故障时的检测及冗余运行问题。
[1] 王真,张东宁,王思远.新型车用高可靠永磁同步电动机设计及控制[J].微特电机,2009(1):9-10.
[2] 刘卫国,马瑞卿.双余度无刷直流电机控制系统[J].电气系统,2006(7):11-13.
[3] 王颖光,李岩,张洪阳.六相永磁同步电动机矢量控制系统研究[J].沈阳理工大学学报,2008,27(5):57 -60.
[4] 董慧芬,周元钧,顾福深.双通道无刷直流电动机控制系统的均衡问题[J].电气传动,2005,35(10):36 -39.
[5] 郭农生,周元均.复合式余度机电作动器的故障检测[C]//第十届小电机技术研讨会论文集,2005:254-259.