大阵面天线液压折叠技术研究与实现
2011-07-14孟国军倪仁品陈建平
孟国军,倪仁品,陈建平
(中国电子科技集团公司第38研究所,安徽 合肥 230031)
0 引 言
该文研制的某平面相控阵雷达天线的口径达6.4 m×4.2 m,分上、下 2 个阵面[1],上、下阵面从高度方向均分,分割后的上、下阵面尺寸为6.4 m×2.1 m。下阵面通过4个铰接点固定于天线座的转盘上,上阵面通过2个铰接点与下阵面相连接,运输时整个阵面在俯仰机构的作用立直,然后上阵面向后折叠180°与固定于下阵面的支撑架相连接,实现了雷达天线工作状态与运输状态的快速转换,使整个雷达有较高的机动性、快速反应能力和战场生存能力[2]。经过充分的分析论证,采用液压及伺服控制技术,解决了该天线自动展开/折叠和锁定难题,完成了天线的自动展开和折叠,实现了公路、铁路运输的兼容[3],并经受住了实际恶劣环境的长期考验。图1为该雷达运输、架设/撤收中间状态和工作状态示意图。
1 系统指标
天线系统的结构指标如下:
(1)天线阵面口径:宽×高=6.4m×4.2m;
(2)天线阵面面精度:均方根值σ≤0.7mm;
(3)展开/折叠时间:3~5min;
(4)天线质量:6t;
(5)运输方式:公路、铁路;
(6)抗风能力:8级风正常工作,12级风不破坏。
2 天线展开/折叠系统设计[4]
根据天线结构指标必须将天线分为上下2个阵面,运输时使2个阵面背向折叠成“∏”字型垂直立于机动轮拖车上,才能满足整车运输的要求。工作时将上阵面翻转180°与下阵面拼接成一个完整天线阵面,然后再倾斜整个天线阵面使天线阵面与水平面夹角83°到天线工作角度,如图1所示。

2.1 翻转方案选择
天线的分割是为了满足运输要求,而天线的最终目的是用来发射和接收电磁波。因此不论天线如何分割,天线自动拼装的实质就是实现天线各个分块之间的定位和重复定位精度,并锁固,从而确保天线的面精度。如果把天线架设过程进行分解,天线展开由天线上阵面合拢、定位、锁固;天线阵面运动到预定的仰角;天线分解进入运输状态、锁固等动作组成。
如此大口径大质量天线的分块处理,无法采用以前成熟的机电式展开/折叠方案来解决,因为驱动能力严重不足。同时又因空间有限,不允许重新设计新的机电式展开/折叠系统来解决此问题。
鉴于以上特点,经过计算、比较和分析论证,天线展开/折叠方案采用液压控制技术。对于展开/折叠来说,液压控制技术有其明显的优点:
(1)驱动力矩大,承载能力强;
(2)执行机构体积小,质量轻,结构紧凑;
(3)传动平稳,负载平衡能力好;
(4)速度可以可无级调整;
(5)容易实现手动应急操作及过载保护。
2.2 翻转机构设计
在确定了驱动机构采用液压控制技术之后,那么采用何种器件作为驱动元件成为必须解决的首要问题。经过调研和论证最后采用了液压回转缸来驱动。液压回转缸具有以下特点:(1)正反向扭矩一致;(2)结构紧凑简单;(3)用于回转运动无需外部连接;(4)具有良好的负载平衡能力;(5)具有较大的扭矩输出(压强21 MPa时,输出扭矩34 000 N·m);(6)到位无冲击;(7)无外漏。
对于6.5m宽天线口径,采用单支撑点进行翻转传动和锁定不易于保证上阵面的刚度,故采用双机构驱动翻转天线上阵面。但是单独一套具有足够的能力和强度在各种恶劣气候条件下支撑天线停在任意角度。当某一个驱动机构突然失效,系统具有足够的安全性确保天线不损坏。
液压控制系统构成和工作原理如图1所示。天线下阵面用铰接方式固定于转盘上,而上阵面则在驱动机构的带动下围绕一个固定的转轴旋转,实现天线的展开/折叠。系统采用双套驱动机构可以使天线在展开/折叠的时候受力均匀,并且可以在一个驱动系统传动出故障时确保天线上阵面不致跌落。
2.3 液压控制系统
天线展开/折叠液压控制系统[5]原理图如图2所示。为保证系统功能的实现,采用电机驱动油泵作液压系统的动力源,在液压控制系统中采用了换向阀、调速阀、单向阀、溢流阀、平衡阀、防爆阀、压力表等器件。换向阀用于控制液压回转缸输出轴的正反转,从而控制天线上阵面的展开与折叠;调速阀用于调整油缸运动速度;单向阀用于防止系统长期不工作时油缸和管路中液压油的回流;溢流阀用于控制整个系统的压力;平衡阀用于保证平衡重力和风载,防止油缸超速下行,保证油缸运动平稳可靠;防爆阀用于防止当系统管路突然失效时天线上阵面不发生跌落失效;压力表用于检测管路油压。

图2 液压控制系统原理图
2.4 伺服控制系统
伺服控制系统[6]最关键的要求是双驱动机构的同步问题,天线定位精度和重复定位精度的问题实际上已转化为机械问题。驱动控制系统只要解决好油缸同步,以PLC为中心的控制系统构成原理如图3所示。PLC含有I/Q开关量模块、AI/AQ模拟量模块。图3中各个单元功能如下:
(1)折叠机构。通过换向阀的切换和平衡阀的共同作用使折叠机构同步正反转,共同实现天线上阵面的展开和收拢。
(2)控制器。液压控制系统换向阀的驱动装置。控制信号来源于PLC控制器[7]。
(3)PLC控制器。系统的核心控制单元,所有控制指令都是从这里发出去的,各种反馈信号也都回到这里,使各个物理量的控制构成多个相对独立的闭环系统。
(4)接近开关。用于检测天线和定位机构所处物理状态。
对于两折叠机构同步,它就是油缸输出轴转速的同步问题。在该系统中采用平衡阀来实现双折叠机构的实时同步。天线上阵面的设备布局是左右严格对称,折叠机构的布局也是左右严格对称,这就基本保证了两折叠机构的负载是基本相等的,因而在此条件下采用平衡阀来保证两油缸的实时同步是可行的。当两折叠机构出现不同步时,因天线上阵面的刚性会使两油缸的负载发生明显变化,此时平衡阀发生作用,使负载小的油缸进油量大于负载大油缸,从而使两油缸负载基本平衡,输出轴转速达到一致。经过多次天线展开/折叠试验,对于负载对称的该天线系统采用平衡阀来实现双油缸同步是成功可靠的。
2.5 定位与锁定
天线上阵面的定位,在上下阵面的结合部位安装如图4所示的4对定位销,并与翻转机构配对使用,实现翻转、定位和锁定三位一体[8]。由图4可知,翻转机构与定位销已限定了天线上阵面的X、Y、Z、X旋转和Y旋转5个自由度,只留下了Z轴顺时针旋转这一个自由度。只要再限制Z轴顺时针旋转这个自由度即可实现重复定位。在上阵面接近预定位置时精确设定翻转机构的输出行程,使上阵面与下阵面通过定位销结合后定位端面保持预定的正压力并锁定传动轴。这个正压力可以使传动齿轮消隙实现具有风负载条件下的定位锁定刚度,同时也约束了Z轴顺时针旋转自由度,从而保证就保证了整个天线阵面的重复面精度。

图3 天线伺服控制系统的控制框图

图4 上阵面的重复定位原理示意图
天线上阵面的锁定,对于该天线上阵面到位不再需要另加锁定机构,直接由天线上阵面的自重和回转液压缸自身的特性就可以实现有效可靠的锁定。天线系统的实物照片如图5和图6所示。
3 安全性、可靠性设计
该天线的安全性集中表现在天线展开/折叠系统上。对于如此大型天线的展开/折叠,安全性的问题尤为突出[9]。为此采取了如下措施:
(1)采用双驱动机构。当一个驱动机构出现损坏,另外一个驱动机构可以把天线停在任意位置,并且允许把损坏的驱动机构完全拆除。
(2)设置防爆阀保护。在油缸的2个油口全都装了防爆阀,所以系统在天线处任意位置出现破坏性失效时,天线都会锁定在相应的位置,不会产生跌落现象。
(3)设置溢流阀保护。液压控制系统压力超过额定值时系统自动停止,不会损坏天线。
(4)采用叠加阀。阀集成设计,减少连接管路,减少管路连接故障。
(5)采取软件互锁。在控制软件中设置互锁,保证只有在正常的状态下才可以进行相关的下一步操作,不可跨步操作,从而可以防止误操作以保护天线安全。
4 系统解决的关键技术
该液压展开/折叠系统解决了以下关键技术:
(1)天线上阵面的自动展开与收拢。采用液压回转缸作驱动元件来实现天线上阵面展开与收拢,系统简单,动作可靠稳定,机构精巧。
(2)天线上阵面的自动定位和重复定位。采用4组定位销与翻转机构共同来实现天线上阵面的自动定位与重复定位,结构简单、经典、可靠,重复精度高。
(3)天线上阵面的自动锁定。通过对天线上阵面受力分析及液压回转缸特性的了解,天线上阵面的自动锁定不需额外的锁定机构,整个系统简单又可靠。
(4)天线骨架与翻转机构一体化设计。经过优化设计,把翻转机构有机地融合于天线骨架内,既实现规定载荷下的天线的刚、强度[10],又实现了天线的展开/折叠的功能。

图5 天线展开状态
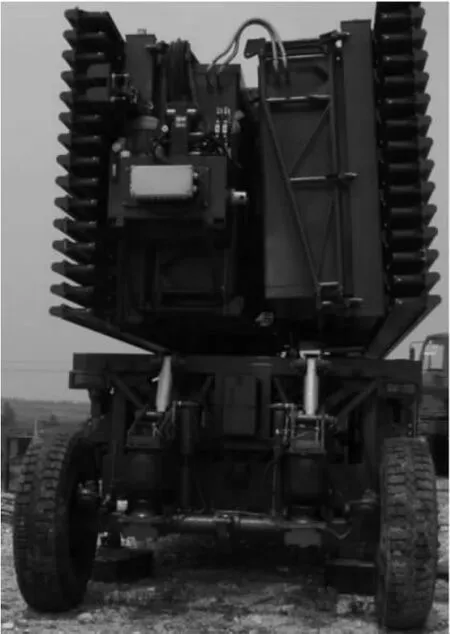
图6 天线折叠状态
(5)驱动、控制系统的软硬件设计。采用经典的控制系统和可靠成熟的元器件,保证了控制系统的可靠性和系统的安全性,具有高可靠、抗干扰能力强、能运行于恶劣环境和强大的功能指令集等特点;
(6)系统适用性、可维性、可靠性和安全性设计。
5 结束语
经过大量的实践,液压式大面天线自动展开/折叠系统实现了以下功能:天线自动展开、折叠,双机同步,驱动机构过载自动保护,驱动机构掉电时防天线跌落保护,天线自动锁定、解锁等功能。该系统成功地把执行机构和锁定机构进行了一体化设计,具有体积小、质量轻、可靠性高、无级调速、双机同步、系统掉电后可长期锁定等特点;具有加工、维修简单,环境适应能力好、成本低等优点。该系统成功实现公路、铁路运输,成功地做了大量的可靠性试验并已交付部队使用,证明该系统达到设计要求、安全可靠。
[1]陈建平.大阵面天线自动展开/折叠设计与系统实现[J].现代电子,2002,79(2):46-50.
[2]程辉明,许统融.地面高机动雷达集成化设计技术[J].电子机械工程,2005,21(3):22-23.
[3]张增太.机动式3D雷达结构总体设计探讨[J].电子机械工程,2004,20(5):11-13.
[4]孟宪源.现代机构手册[M].北京:机械工业出版社,2006.
[5]张利平.液压控制系统及设计[M].北京:化学工业出版社,2006.
[6]胡佑德.伺服系统原理与设计[M].北京:北京理工大学出版社,1995.
[7]宋德玉.可编程序控制器原理及应用系统设计技术[M].北京:冶金工业出版社,2006.
[8]张润逵.雷达结构和工艺[M].北京:电子工业出版社,2007.
[9]戚仁欣.雷达天线结构设计的安全设计和安全操作[J].现代电子,2004,81(4):48-51.
[10]李黎明.ANSYS有限元分析实用教程[M].北京:清华大学出版社,2005.