全自动电池箱更换设备定位技术研究
2011-07-12赵明宇路致远王国梁
赵明宇,路致远,王国梁
(国网电力科学研究院,南京 210061)
0 引言
电动汽车已成为未来汽车工业发展的方向,它主要有整车充电与电池更换两种能量供给方式,采用电池更换模式可大幅减少电动汽车的电能补给时间,同时有利于提高动力电池利用效率及使用寿命,正得到越来越多研究人员的关注。在电池更换模式中,由于电动汽车停靠位姿的误差以及不同电池箱在车身上的位姿变形误差等因素,全自动电池箱更换设备对电池箱位姿的自动精确定位是首先要解决的难题。
为了减小机器人定位误差,国内外学者提出了多种方法。密歇根大学机器人实验室Borenstein和Feng两人提出的UMBmark校核算法对测程法的系统误差进行了研究[1,2]。Lionis和Walthelm等人从离散的激光扫描数据中提取线段特征来定位机器人[3,4]。Hashem等人则采用序列Monte Carlo定位算法实现机器人的自定位[5]。在国内,上海交通大学自主机器人研究组基于FRONTIER-I自主移动机器人平台,提出了基于单向[6]、全景视觉[7]等移动机器人的自定位算法。文献[8]基于激光和视觉传感器模型的不同,分别采用加权最小二乘拟合方法和非局部最大抑制算法来提取二维水平环节特征和垂直物体边缘,以完成高精度定位过程。文献[9]在UMBmark校核算法的基础上定义了测程法系统误差模型以及其算法来提高定位精度。本文通过对电动汽车电池箱位姿的综合误差进行分析,基于多传感器融合技术,对全自动电池箱更换设备的定位技术展开了研究。
1 定位对象分析
1.1 辅助定位停车
无论采用何种定位技术及算法,电动汽车需停在电池更换设备可操作的行程范围内。因此,应使用车辆导引装置辅助电动汽车停至规定位置范围内,完成车辆导引、定位和固定功能。
1.2 车身位姿误差
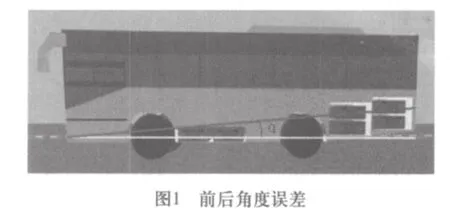
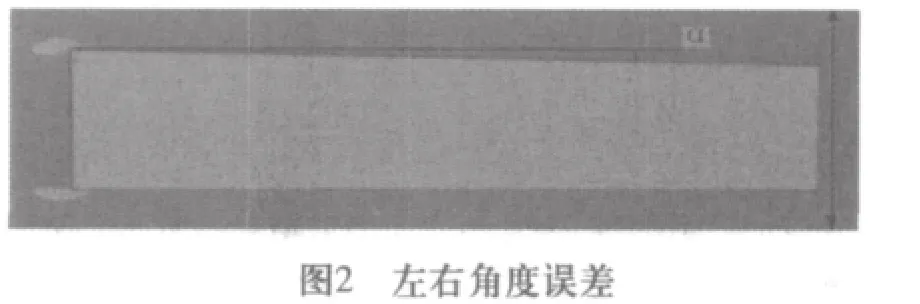
电动汽车通过车辆导引装置停泊后,其车身空间位姿仍然会有较大误差,包括车身空间坐标及相应偏转角度,如图1 图3所示。
1.3 电池箱位姿误差
理论上,电池箱在车身上相对位置固定,定位到电动汽车位姿,即可定位到电池箱位姿。但事实并非如此,车架在焊接加工以及车辆运行过程中产生的累积误差,可多达20-30mm左右,对应到电池箱上变形也较为可观。此外,车身不同位置电池箱的误差也不尽相同,因此,电池箱更换设备在对整车位姿进行过定位分析后,仍需对每个电池箱位姿进行单独定位。

2 定位原理
2.1 概述
根据以上对电动汽车位姿误差的分析,本文提出以下基于视觉传感器和激光传感器的多重定位技术步骤来解决电池箱更换设备对车辆的全局定位和局部定位:
1)车辆初定位
借助车辆导引装置辅助车辆初步定位,将电动汽车停靠在预定的电池箱更换设备操作行程范围内。
2)矩形目标全局粗定位
矩形目标安装在车身固定位置上。从某种意义上说,矩形目标的位姿即代表了电动汽车车身的整体位姿,通过全局定位确定车身的先验位姿。
3)三角目标局部精定位
三角目标就近安装在每个电池箱附近的固定位置,可以说,三角目标的位姿即代表了电池箱的位姿。三角目标一般设置比车架变形误差的尺寸要大,比矩形目标尺寸要小。局部定位实际上是对先验位姿重新修正的过程,体现了融合多传感器数据以产生更精确计算位姿的思路。
2.2 基于视觉传感器的矩形目标全局粗定位
视觉定位的核心任务是从这些视觉传感器捕捉的图像中提取出期望的图像特征并与环境特征建立某种一致性的联系。在这里对矩形目标的定位,实质上是对直线段进行提取和定位的过程。针对我们的应用背景是二值图像的原因,简化了直线提取的算法,这一过程,我们使用直线支持区的概念。先用搜索和计算的方法获得属于某条直线的所有点,即获得该直线的支持区点集,然后在此基础上结合最小二乘法求出精确的直线参数,最后求出矩形目标的位姿参数。
由于任意一条直线与凸多边形最多只有两个交点,所以对于凸多边形物体边缘的二值图像,若存在三个相距足够远的像素点处于同一条直线上,则这三点必然位于该凸多边形的一条边上,由此确定该多边形的一条边。该算法主要步骤如下:
1)从图像中搜索出位于同一条直线上相距足够远的三个像素点,由此确定第一条粗糙直线,并找出所有属于这条直线的点,这些点就构成该直线支持区点集;
2)对1)中得到的点集进行最小二乘法拟合,得到该直线的精确方程;3)从原图像中删除1)中所得的直线支持区点集;4)重复以上步骤,在剩余点中找出矩形目标剩下的三条直线段;
5)通过计算出的四条直线段即矩形目标的四条边在视觉坐标系xz平面中的投影,据此计算出矩形目标的位姿参数。
2.2.1 粗糙直线段提取
首先,提取目标直线段上相距足够远的三个像素点,其方法是采用从上到下、自左向右逐行扫描图像的方法,遇到第一个黑像素点便停止该行的扫描,并记下该点坐标。隔数行或数列用类似方法搜索出第二个和第三个黑像素点。
其次,将这三个像素点两两相连,可构成三条直线,若计算出两两直线之间的夹角(取锐角)α1,α2,α3均小于设定的阈值αmax,则认为此三点构成一条直线,若不满足则去除第一像素点,并继续扫描计算;若找不到满足的第一像素点,则去除第二像素点,并重新扫描计算,直到找到一条直线段。
最后,对已找到的直线进行验证。扫描整个图像,找出所有该直线段充分小邻域内的像素点,若所得像素点的数目大于设定的阈值Ts,则可判定该直线正确,否则重复以上所有操作,直至找到满足上述要求的一条直线段。以此类推,找出剩下的三条直线段。
2.2.2 精确直线段提取
由于采用随机所得的三点确定一条直线段,存在一定的误差,因此,本文利用最小二乘法进行精确直线的拟合。上节所得粗糙直线段充分小邻域内的像素点定义为该直线段的支持区点集,记为:


其中,L为法线长度,θ为法线与x轴夹角。
直线段的支持区点集P内所有点到粗糙直线的距离的平方和为:

为使D最小,就是要求出参数θ和L,故对θ和L求偏导,令:


由式(4)可得:

将式(8)代入式(6),就可求得参数L,将求得的θ和L代入式(2),可确定直线精确的法线式方程。

2.2.3 矩形目标位姿确定
通过上一节算法可依次确定矩形目标的四条直线段,此四条直线段组成的四边形即矩形目标在视觉坐标系xz平面内的投影,如图4所示,矩形目标的位姿误差即反映车辆停靠位姿的偏差。由于四边形的直线精确方程已计算出,可求得矩形目标位姿参数,包括中心点坐标及其偏角。
2.3 基于激光传感器的三角目标局部精定位
通过上述方法确定了矩形目标的中心坐标及其偏角后,可依据三角目标和矩形目标的中心坐标的理论空间关系,计算出三角目标中心的粗糙位置。值得注意的是,由于电动汽车运行中车架变形等诸多因素,计算出的三角目标中心坐标与其实际位置会有偏差。通过电池箱更换设备的双激光传感器对电池箱附近的两个三角目标进行一次同时扫描,即可据以下方法进行二次计算修正。
以人为本,实质上反映的是一种人本管理理念,既保留人性化管理对人的尊重,调动起人的主观能动性,用每个人的发展来推动高校整体的发展,又不丧失以制度为标准的原则,让管理仍然有章可循。建设以人为本的高校文化建设,可以将高校内控制度化的一面内化到高校成员的言行中,将高校内控的控制意识转化为高校成员的潜意识。以人为本思想的普及,可以自上而下带动优秀高校文化建设进一步进行巩固,高校内部控制系统得到持续完善。
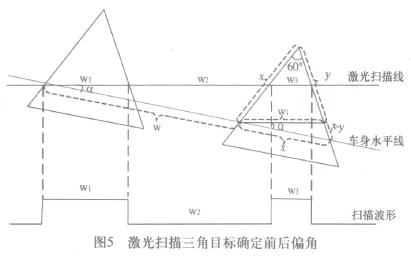
2.3.1 三角目标前后偏角
为确定电池箱前后方向偏角,采用电池箱更换设备的双激光传感器对电池箱附近的三角目标进行激光扫描,如图5所示。
结合图5,由三角形余弦定理:

由式(9)和式(10),可得出:

根据三角形关系:

根据式(10)、式(11)和式(12),计算电池箱前后偏角:
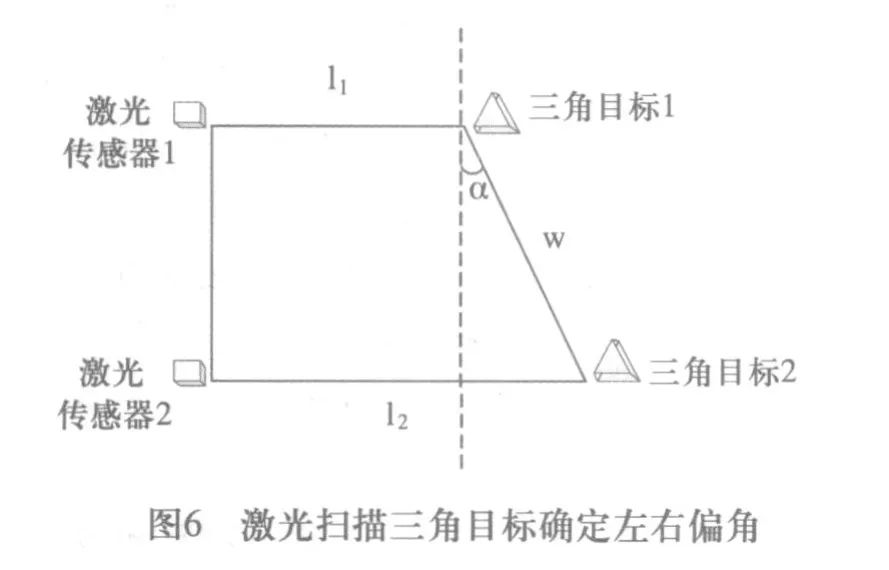
2.3.2 三角目标左右偏角
对三角目标前后偏角修正后,激光传感器扫描三角目标确定左右偏角就变得简单了。图6为扫描示意图,w为两个三角标之间的固定距离,l1和l2为测得的激光传感器和三角目标距离,使用如下方法计算左右偏角即可:

3 工程应用
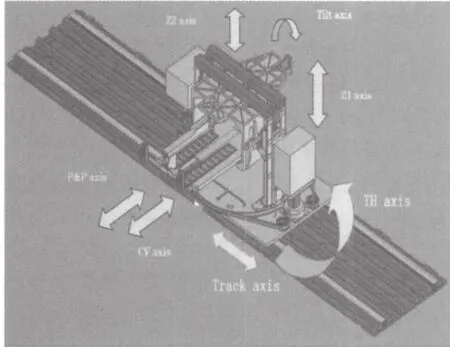
图7 电池箱更换设备各轴动作
基于视觉传感器和激光传感器的多重定位技术步已经成功运用于国网电力科学研究院最新研制的全自动电池箱更换设备上,解决了电池箱更换设备对车辆的全局定位和局部定位问题。电池箱更换设备通过安装在车身固定位置上的矩形目标定位车辆的整体位姿,通过电池箱附近就近安装的三角目标定位电池箱的精确位姿。计算出车辆电池箱的不同位姿后,通过调整电池箱更换设备的各轴运动参数即可实现对电池箱的高精度装卸动作,如图7所示。
4 结论
本文提出了基于视觉与激光等多传感器信息融合的定位方法,实现了全自动电池箱更换设备对电动汽车的全局粗定位和局部精定位,使得电池箱更换设备对电动汽车电池箱具有更好的适应性,更好地服务于电动汽车充换电设施的建设,进一步促进电动汽车的快速、健康发展。
[1] Borenstein J, Feng L.Measurement and correction of systematic odometry errors in mobile robots[J].IEEE Transactions on Robotics and Automation, 1996, 12(6):869-880
[2] Borenstein J, Feng L.UMBmark-a method for measuring,comparing, and correcting dead-reckoning errors in mobile robots[J].Technical Report UM-MEAM-94-22, University of Michigan, 1994.
[3] Lionis G S, Kyriakopoulos K J.A laser scanner based mobile robust SLAM algorithm with improved convergence properties.[C] In: Proceedings of the 2002 IEEE International Conference on Intelligent Robots and Systems.Lausanne, Switzerland October 2002.582-587.
[4] Walthelm A.New approach to global self-localization with laser range scans in unstructured environments[C].In: Proceedings of 2002 Intelligent Vehicle Symposium.2002.17-21.
[5] Hashem T, Henrik A, Andre T.Localization of Mobile Robots with Omnidirectional Vision Using Particle Filter and Iterative SIFT[J].Robotics and Autonomous Systems,2006,54(9):758-765.
[6] 潘良景, 陈卫东.室内移动机器人的视觉定位方法研究[J].机器人, 2006, 28(5): 504-509.
[7] 王景川, 陈卫东, 曹其新.基于全景视觉与里程计的移动机器人自定位方法研究[J].机器人, 2005, 27(1): 41-45.
[8] 庄严, 王伟, 王珂, 等.移动机器人基于激光测距和单目视觉的室内同时定位和地图构建[J].自动化学报, 2005,31(6): 925-933.
[9] 王卫华, 熊有伦, 孙容磊.测程法系统误差的测量与校核[J].机器人, 2004, 26(5): 454-460.
