晶片传递手指优化设计
2011-06-23谷德君张浩渊卢继奎
谷德君,张浩渊,卢继奎
(沈阳芯源微电子设备有限公司,辽宁沈阳110168)
芯片加工设备在使用中,有大量的晶片在各个单元间的传递动作,这一动作主要是由机器人及其附属手指来完成的。常见的机器人手指可分为I型和Y型,Y型手指如图1所示。手指的内部开有管路,管路的一端与机器人的真空管路相连接,管路的另一端与晶片相接触,从而将晶片通过真空吸附的方式固定在机器人手指上。

图1 机器人Y型手指
本文通过对沈阳芯源微电子设备有限公司星形匀胶显影设备的Y型手指进行优化设计,说明了优化设计的步骤,并将手指端部的下挠度减小到可接受的范围。
1 建模
ANSYS传统的建模方法比较费时费力,而使用APDL语言可以更加快速高效地完成这一工作。在手指模型中,并不是把每一个尺寸特征都参数化,而要根据总体的设计要求来确定。
模型中不变的参数有两个:一是手指的总长,它是由晶片所需要的传送距离所确定的;二是手指根部的宽度,它是由机器人手臂的连接槽尺寸所确定的。
需要参数化的尺寸数据一共有4个,圆弧半径R,手指宽度A,手指外侧长度B,收回尺寸C(如图2所示)。因手指为对称结构,为节省资源与计算时间,只建立其一半模型即可。
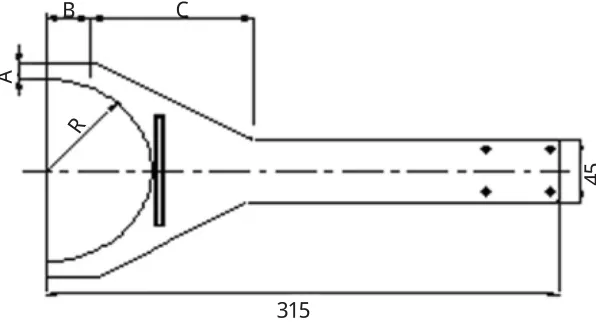
图2 需要参数化的手指尺寸数据
ANSYS程序提供了两种优化的方法,这两种方法可以处理绝大多数的优化问题。零阶方法是一个很完善的处理方法,可以很有效地处理大多数的工程问题。一阶方法基于目标函数对设计变量的敏感程度,因此更加适合于精确的优化分析。对于这两种方法,ANSYS程序提供了一系列的分析——评估——修正的循环过程。就是对于初始设计进行分析,对分析结果就设计要求进行评估,然后修正设计。这一循环过程重复进行,直到所有的设计要求都满足为止。
除了这两种优化方法,ANSYS程序还提供了一系列的优化工具,以提高优化过程的效率。例如,随机优化分析的迭代次数是可以指定的。随机计算结果的初始值,可以作为优化过程的起点数值。
本文分析的目标是手指的刚性。手指为薄壁金属件,故单元类型采用板壳单元shell63计算。手指右端通过螺栓与机器人手臂连接,左端以真空吸附的方式,将晶片吸附在手指上。故模型右端与机器人螺栓连接部分,可处理为刚性的全约束,晶片每次放置在手指上的位置是固定的,要保证手指圆弧的圆心和晶圆的圆心重合,为与实际情况更加符合,载荷加载方式为以晶片圆心处为中心,晶圆所覆盖的区域建立一个刚性区域,将晶片的自重加在中心处。
2 优化过程及结果分析
ANSYS优化模块中有设计变量、状态变量和目标函数。这些变量是由用户定义的参数来指定的。
设计变量(DVs)为自变量,优化结果的取得,就是通过改变设计变量的数值来实现的。每个设计变量都有上下限,它定义了设计变量的变化范围。手指的设计变量见表1。ANSYS优化程序最多可以定义60个设计变量。

表1 设计变量(单位:mm)
状态变量(SVs)是约束设计的数值。它们是因变量,是设计变量的函数。状态变量可能会有上下限,也可能只有单方面的限制,即只有上限或只有下限。在本文中,因为载荷较小,分析关心的是刚度问题而不是强度问题,所以此处不需要定义状态变量。
目标函数是要尽量减小的数值。它必须是设计变量的函数,也就是说,改变设计变量的数值,将改变目标函数的数值。在本文中,手指的最大下挠度,应该是目标函数。在ANSYS优化程序中,只能设定一个目标函数。
本文使用ANSYS的APDL语言对手指进行建模、求解和优化分析,下面是APDL语言的部分主要代码及其注释:


以上4个变量为设计变量,以挠度值最小为目标函数,得到的优化结果见表2。
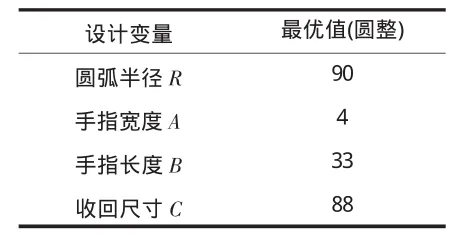
表2 优化结果 (单位:mm)
手指采用以上尺寸,分析结果如图3所示。此时手指端部的下挠由最初的2.276 mm降低到1.82 mm。
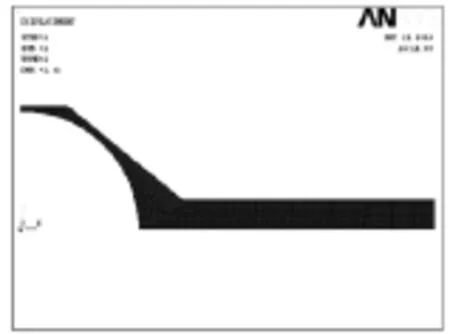
图3 手指尺寸分析结果
3 结束语
以ANSYS软件为平台,针对Y型手指结构简单、长度不同形状相似等特点,使用ANSYS优化模块对其外形进行优化,保证了传递手指端部的下挠度在可接受的范围内,最终得到了比较理想的优化结果。该分析方法及步骤,对相似零部件的设计具有一定的参考借鉴价值。
[1]王学文.ANSYS优化设计若干问题探讨[J].塑性工程学报,2007,(12):181-184.
[2]刘诗安.六角钢盘的ANSYS优化设计[J].中国科技信息,2005,(19):94-96.
[3]孙足来.真空电弧炉炉体提升机构的ANSYS优化设计[J].真空,2010,(7):55-57.