基于位置信息的宽带雷达目标距离段联合检测算法*
2011-06-07籍林峰
李 林 饶 起 籍林峰
(南京船舶雷达研究所 南京 210003)
1 引言
宽带雷达技术早在1960年就开始军事应用方面的研究,美国于1992年把发展超宽带雷达列入国防部计划,目前已建立了宽带/超宽带雷达基地,用于探测丛林目标和海上警戒[1]。与传统窄带雷达相比,宽带雷达具有许多特殊功能,例如:透视能力、反侦察能力、目标识别、以及高分辨成像能力。同时,宽带雷达相对窄带雷达而言还具有距离测量精度高、抗干扰能力强、提高微弱小目标、低空掠海飞行目标的检测概率等诸多优势,成为今后雷达发展的一个重要方向。在宽带情况下,目标和杂波的特性都发生了变化,飞机、舰船等目标不能再看成是点目标,其目标回波表现为多散射点形成的一维距离像[2~3],即目标变成了沿波束照射径向距离“走廊”上的一段连续距离单元对应的扩展目标。与此同时,雷达杂波的幅度分布明显偏离窄带情况下的瑞利分布[4]。因此,在窄带方式下行之有效的一些目标检测方法在宽带方式下未必适用。因而,亟需进一步研究宽带条件下的目标回波信号特性,寻找适用于宽带条件下的检测方法,充分利用宽带雷达大带宽和高距离分辨率所带来的好处。本文希望通过对宽带目标回波特性分析、目标回波的信号积累方法以及性能分析,解决宽带雷达下信号检测原理及方法研究,最终为宽带雷达目标检测提供有效的处理方法。
2 宽带信号目标回波特性分析
宽带信号目标的回波是沿波束照射径向距离“走廊”上的一段连续距离单元所对应的扩展目标,为一串具有随机参数的脉冲序列。每个脉冲是目标上散射点的回波,其波形除时延、相位、幅度为随机变量外,与发射信号具有相同的波形。目标的结构和雷达视角决定了脉冲串的排列,每个脉冲的幅度取决于对应目标亮点的雷达截面积,脉冲的极性则取决于散射信号的目标材质的磁导率。空间目标的散射面积随时间而变化,从而成为一种目标RCS,并含有目标一维距离像的特性[5~6]。
文献[7]对宽带雷达回波的幅度和相位特性进行了较为详细的分析,图1给出了单个发射脉冲回波脉冲串的幅度和相位波形。经过脉压以后,宽带信号脉冲宽度很小,为信号带宽的倒数,其对应的空间距离也很小,一般来讲小于目标长度。根据文献[8],如当信号带宽Δf=200MHz时,回波信号脉冲宽度τ=5ns,其对应的空间长度L=(c*τ)/2=0.75m。
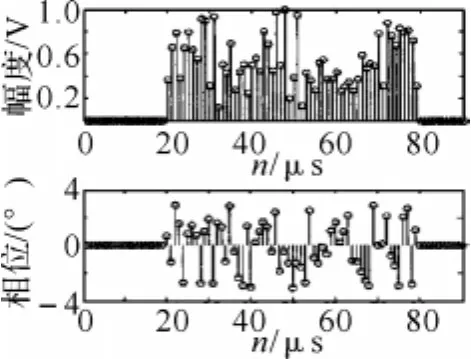
图1 单个发射脉冲回波脉冲串的幅度和相位

图2 理想情况下不同回波脉冲幅度(Vr=300m/s)
图1所示的幅度变化表示飞机不同位置散射强度不同。由于不同高分辨距离单元回波之间是不相关的,因此其相位分布是随机性的。
图2列出了理想情况下目标径向速度Vr=300m/s,脉冲重复周期Tr=500μs时,第10、20、30、40、50个回波脉冲的幅度变化。由计算可知,同一距离单元相邻脉冲回波之间的时间差为ΔT=2VrTr/c=1ns。
如果压缩后脉冲宽度τ=5ns时,目标的第6个回波脉冲与第1个回波脉冲对应的位置将平移一个距离单元,这就是不同重复周期之间的距离走动。
根据文献[7~10]进行归纳,宽带雷达回波信号具有以下特点:
1)宽带雷达下杂波的影响不如常规窄带雷达严重,随目标距离的增加而下降,且随着雷达分辨率的提高,信杂比(S/C)的改善会越好。因此,在同等条件下常规雷达不易检测的弱小目标,在宽带雷达下将变得容易检测。
2)宽带雷达每个脉冲重复周期的目标回波具有随机参数的特点,即当目标结构、姿态、雷达入射角改变时,回波脉冲串中各个子脉冲的幅度、相位、到达时间都会随之改变。
3 宽带信号目标检测技术
在宽带高分辨雷达照射下,飞机、舰船等目标已不能被看成点目标,而是沿波束照射径向距离“走廊”上的一段连续距离单元所对应的扩展目标,因此,常规雷达下的目标检测方法很难用来检测宽带高分辨雷达下的目标。
对于非瑞利型杂波,如果应用常规的均值检测器,则由于非瑞利杂波概率密度函数的较长拖尾导致虚警数加大;如果提高检测门限,则又导致检测概率的降低。由于高分辨雷达的背景环境较恶劣,可能含有角反射器等孤立强散射点的假目标(如人工的角反射器、毁坏的人工目标等),而人工目标(如飞机、舰船等)有一定的径向尺寸和一定数目的强散射点,我们可以利用人工目标与杂波等假目标在尺寸和强散射点数目上的不同而将它们分离[9]。
为此,提出一种基于位置信息的宽带雷达目标距离段联合检测算法,该算法可以检测出具有多个散射点特性的扩展目标,对于存在杂乱脉冲干扰或多个扩展目标存在的情况,该方法也能辨别出真假目标,将距离“走廊”上不同的扩展目标完好地检测出来。下面讨论该检测器的结构。
3.1 基于第一检测门限的位置检测
第一门限的选择方法很多,最常用的一种方法就是根据样本的特性来决定其大小,如样本幅度的均值等。根据高分辨雷达杂波的不均匀特性,由于样本中总是包含噪声和杂波等影响,因此,使用样本幅度平均的办法来选择第一门限是不太合理的。既然高分辨雷达的S/C比较高,在待检测的目标尺寸范围内的目标散射点回波强度,可以作为选择门限的依据,因此,我们根据目标散射点的最大回波幅度,来选择第一门限。假设在中(视)频输出端经脉压后得到的一个扫频周期的回波幅度序列为x1,x2,…,xN,我们从中选择最大值:

那么,第一门限可选择为:

其中,η为确信系数,可根据S/C比值大小(或虚警率的大小)来定,一般可选择0.3~0.7左右[11]。将回波幅度序列x1,x2,…,xN与门限Th1进行比较,并记录超过门限的样本位置序号:

其中,arg{·}表示取变元运算。因而,Ii代表xi的位置信息。
显然,

Ii为经过第一门限检测的输出超过门限的位置信息。如果将Ii=0的位置序号去除,则剩下的集合为

即有K个可能“目标”样本点超过第一门限,而且,它们分别分布在第i1,i2,…,iK个距离单元上。
3.2 基于位置信息的相关检测
设高分辨雷达的距离分辨率为ΔR,待检目标所占的最大距离单元数(即距离窗)为W,则目标所占的最大径向距离为L=ΔR*W,以L为参考距离窗,讨论K个可能的“目标”样本点在L中的个数,来判别该“目标”样本点是否为待检目标。为便于理解,将K个可能的“目标”样本点的集合I对应的位置信息转换成距离信息矩阵的形式:

式中,r(j,k)=(ik-ij)·ΔR,k>j,j=1,2,…,K-1,式中r(j,k)的几何解释如图3所示。

图3 r(j,k)的几何解释
我们可以建立以K个可能“目标”样本点位置对应的距离段信息为基准的第二门限。如果目标径向距离参考窗内的样本点(强散射点)数IU满足:
若:IU≥Th2⇒则判别有目标
式中,Th2为第二检测门限,代表散射点数,对于一般的目标(如飞机,舰船等)在5~10个左右[11]。不断将距离信息矩阵中的元素与目标的最大径向距离L相比较,并设置记数器IUc(c为可能的多个目标批次),计数在长度L内属于第c个目标的可能散射点数。
3.3 基于位置信息的距离段联合检测算法
算法流程如下:
·基于第一门限的检测
1)按式(1),从距离像幅度序列x1,x2,…,xN中选择最大值xmax;
2)选择确信系数η,按照式(2)建立第一门限Th1;
3)按式(3)、(4)检测超过第一门限的散射点数K,并记录其对应的位置信息;
·基于第二门限的检测
4)j=1,k=2,c=1,IUc=1,根据目标的实际尺寸估计出第二门限Th2,比较开始;
5)若k<K,转6);否则,转7);
6)若r(j,k)<L,则IUc=IUc+1,k=k+1,转回6);否则,转7);
7)若r(j,k-1)-r(j+1,k)<0,转8);否则,转9);
8)若r(j,k-1),则转9);否则,IUc=IUc-1,转9);

10)若IUc≥Th2,则第c个目标出现;否则,没有目标出现;
11)结束。
3.4 目标距离信息提取
假设在某次检测过程中,得到某一目标有N个强散射点,利用文献[9]给出的求质心方法,该次检测对应的目标平均散射中心的径向距离为[13]:

式中:σi为第i个散射中心的回波功率,xi为第i个散射中心对应的径向距离。当得到R0后,以该散射中心为距离门中心,设置一距离跟踪波门,就可实现对目标的自动跟踪。
4 仿真结果与性能分析
仿真条件为:雷达载频f0=5GHz,发射脉冲宽度τ=10μs,带宽B=500MHz,距离分辨率ΔR=0.3m,脉冲重复频率fr=1000Hz,距离窗长rrec=153.6m,假定在雷达扫描范围内的某一距离窗内存在两个目标,如下所示:
目标1有6个强散射点,最大径向长度为7.7m,分别为:50.2 51.8 53.6 54.9 56.2 57.9,散射点对应的RCS为:0.6 0.7 0.5 1.0 0.8 0.6。
目标2有7个强散射点,最大径向长度为9.1m,分别为:100.2 101.6 102.9 104.1 105.8 107.5 109.3,散射点对应的 RCS为:0.7 0.8 1.0 0.8 0.9 1.0 0.7。
图4~图6是仿真结果。
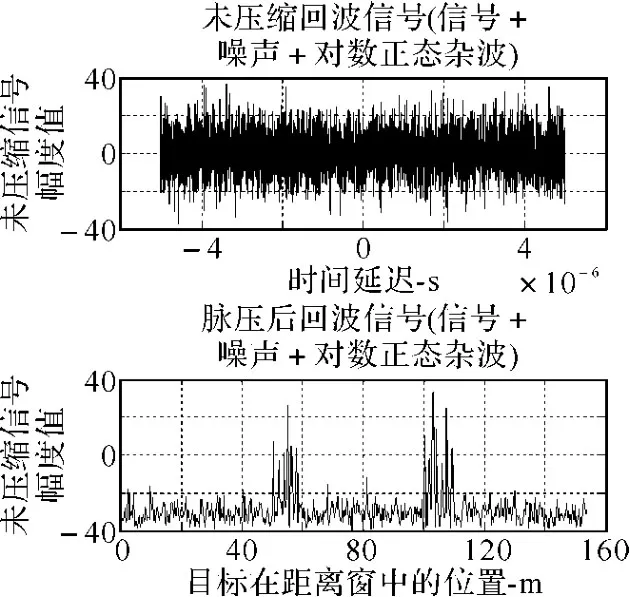
图4 未压缩回波信号

图5 被检测到的目标1回波距离像分布
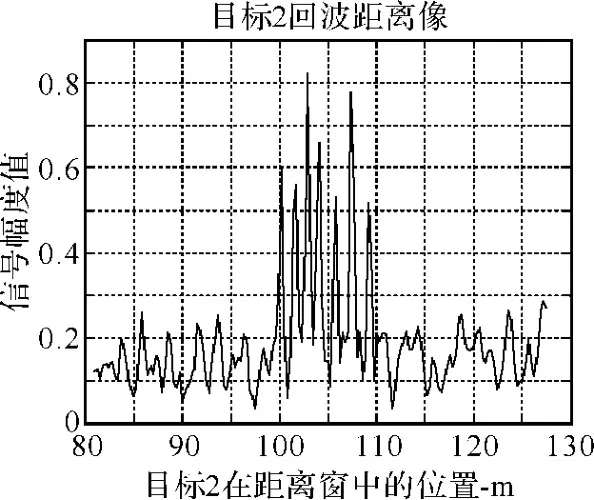
图6 被检测到的目标2回波距离像分布
图4中上图为未压缩的回波信号,里面夹杂着噪声和对数正态杂波,无法判别有无目标及出现的位置。下图为经过脉压后的回波信号,由于宽带条件下目标S/C较高,经脉压后目标的强散射点突出于杂波之上,但仍然存在一些幅度稍弱的强散射点,因此,需进行信号检测来判别是弱小目标还是杂波。
图5和图6所示为两个扩展目标经该算法检测后在强散射点中心距离门内的目标回波距离像分布情况。由此分析可得,目标的强散射点突出于噪声和杂波之上,孤立强杂波散射点由于不符合第二门限的条件而被滤除。由该算法提出的经两个门限检测到目标信号后,设置距离门分别“套住”目标信号即得两个目标对应的距离像分布。
由仿真结果分析知,该检测算法能够检测沿距离“走廊”上不同的扩展目标,因此,具有多目标检测的能力。然而,某些假目标尽管在径向上具有一定的长度,但一般比真实目标的长度短,因此,本文所提出的检测方法可以辨别假目标、检测出真目标来。
5 结语
本文研究了宽带雷达目标信号的检测方法,得出如下结论:
1)对于高分辨雷达下扩展目标的检测问题,可以利用扩展目标上多散射点前后之间的位置相关信息,以增强检测能力。
2)可以建立目标多散射点前后间的关联信息,如借鉴航迹相关技术,是宽带雷达目标检测的一个新的研究方向。
为此,本文提出了基于位置信息的宽带雷达目标距离段联合检测算法,该检测器是一种邻近单元的相关检测器,它利用超过第一门限的强散射点数据的相对位置信息来检测目标信号。通过仿真试验表明,在第二门限假设合理的情况下,该检测器不但可以检测出背景中的目标,而且,还具有剔除假目标(如孤立角反射器或被攻击而废弃的人工目标),以及将距离“走廊”上不同的扩展目标完好地检测出来等优点。此外,本文提出的算法计算复杂度低,工程上易实现,因而,它是高分辨雷达目标检测的一种好方法。
[1]D.R.Wehner.High-Resolution Radar,2nd ed.Bos
ton,MA:Artech House,1995
[2]Wehner D R.High Resolution Radar.Artech House,1987
[3]Mensa D L.High Resolution Radar Imaging.Artech House,1981
[4]Currie N C,Hayes R D,Trebits R N.Millimeter Wave Radar Clutter.Boston,London:Arteeh House,1992
[5]A Farina,F A Studer.Detection with high resolutionradar:Great promise,big challenge[J].Microwave Journal,1991,(5):263~273
[6]Merrill Skolnik,et al.An UWB microwave conceptual design[C]//IEEE International Conference.Geogia,Atlanta:Institute of Electrical & Electronics Engilneer Pub,1995:16~21
[7]黄巍.宽带课题研究报告[D].成都:电子科技大学电子工程学院,2003
[8][美]Merrill I.Skolnik.雷达手册[M].北京:电子工业出版社,2003
[9]黄德双.高分辨雷达智能信号处理技术[M].北京:机械工业出版社,2001
[10]黄巍.相关检测在宽带雷达信号处理中的应用[J].现代雷达,2005,27(2):36~39
[11]D.S.Huang,Y.Q.Han.A detection method of high resolution radar tergets based on position correlation[J].Journal of Electronics,1998,15(2):107~115
[12]林文耀,覃亚丽,胡海容.基于分数傅立叶变换的机载SAR多运动目标检测[J].计算机与数字工程,2009,37(1)
[13]陈希信,刘刚.宽带雷达信号检测技术研究[J].现代雷达,2005,27(8):28~31
