基于虚拟现实的导航试验系统*
2011-06-07王爱民
王 颖 王爱民
(东南大学仪器科学与工程学院 南京 210096)
1 引言
惯性导航[1]是利用惯性元件测量载体相对于惯性空间的运动参数、并经计算后来实施导航任务的一种尖端技术。惯性导航系统的组成设备安装在载体上,它不依赖外界信息,也不向外辐射能量,不易受到干扰,是一种自主式导航系统。与平台式惯性导航相比,捷联式惯性导航省去了惯性平台,陀螺仪和加速度计直接安装在载体上,系统体积小、重量轻、成本低、维护方便。随着高速、大容量的数字计算机和一些新技术的发展,捷联惯导已经得到越来越广泛的应用。
把虚拟现实技术[2]应用到捷联惯性导航系统开发是新的设计思想,它是在建造真实器件和物理样机之前,利用虚拟现实技术建立三维模型,通过动态试验仿真,给出系统的可视化运行过程。相比运用Matlab或Labview进行导航算法仿真的传统方法,利用虚拟现实技术的导航试验系统有以下优点:1)给用户提供了更丰富的信息、人—机配合效率高;2)采用面向对象的设计思想开发,明确划分各模块功能,系统组件化、扩展性强;3)突破环境限制,以虚拟景象和声音给人以身临其境之感。
2 系统总体方案
2.1 系统构架
基于虚拟现实的捷联惯性导航试验系统可简单概括为捷联惯导数字仿真加图形可视化。捷联惯性导航虚拟试验系统的基本组成包括高性能计算机、计算机网络、图像生成与显示系统、数据库(包括捷联惯导算法数据、惯性器件数据、导航数据、三维模型数据)以及相应的人机接口和软件支撑环境,系统结构图如图1所示。

图1 基于虚拟现实的捷联惯导仿真系统拓扑结构图
2.2 系统功能组成
基于虚拟现实的捷联惯性导航试验系统主要包括:虚拟建模系统、虚拟试验环境生成系统、轨迹仿真系统、惯性导航仿真系统、试验管理系统、虚拟试验可视化系统、虚拟试验运行支撑环境、试验结果评价系统几大部分。考虑到虚拟视景仿真部分对计算机运算能力的较高要求以及系统实际运用中的灵活可用性,系统采用分布式的组织形式。以上组成要素分为四块:虚拟可视化部分、惯性器件仿真部分、捷联惯导解算部分以及试验管理、结果评估系统。各部分由局域网相互连接,如图2所示。

图2 基于虚拟现实的捷联惯导试验系统功能框图
3 捷联惯性导航系统仿真
3.1 惯导仿真设计
捷联惯导系统仿真主要是指惯性导航仿真系统和轨迹仿真系统,包含惯性器件(陀螺仪和加速度)数学模型的程序实现、类接口设计,以及导航捷联算法的程序实现、类接口设计和导航轨迹的实现。关系框图[3]如图3所示。

图3 捷联惯性导航系统仿真框图
3.2 捷联惯导算法
姿态微分方程是捷联系统的动态方程之一。根据姿态微分方程计算姿态矩阵是捷联惯性导航最重要的一部分工作,由此确定载体坐标系与导航坐标系之间的方向余弦矩阵,是导航计算和准确控制的基础。姿态矩阵即时修正算法主要有三种[4]:欧拉角法(三参数法)、转动四元数法(四参数法)、方向余弦矩阵法(九参数法),它们通过解不同的微分方程得到姿态矩阵。考察验证算法的运行效果是导航试验的主要任务之一。为了满足多样性需求,研究各种不同算法的特性,系统内置了多种算法。
3.2.1 四元数毕卡迭代法
捷联陀螺的输出一般情况下是采样时间间隔内的角增量,为了避免噪声的微分放大,应直接用角增量来确定四元数,而不应该将角增量换算成角速度。毕卡算法[5]就是由角增量计算四元数的常用算法。
四元数微分方程为:

用毕卡算法求解微分方程得:


3.2.2 四元数四阶龙格库塔法
龙格库塔算法是一种便于使用计算机求解微分方程的数值积分算法,表达为当已知方程式解的初值时,可在解存在的区间各点上,逐点求出方程式的近似解,算法的阶次越高,计算精度越高。
利用四阶龙格-库塔法求解四元数微分方程:

4 虚拟环境建模
虚拟环境建模是虚拟环境生成中非常关键的一环。导航仿真的场景为虚拟船舶在海洋环境中航行,航行过程中场景的真实感主要依赖于周遭地理环境的自然变化来体现,这使得地形的建立在整个虚拟环境的建模中尤为重要[6]。
常见的地形可视化分为根据地学图形数据的精确描述以及模拟自然场景中的地形两种[7~8]。为了增加导航虚拟仿真系统的真实性,更好地模拟运载体的实际航线并考察实际航线下的导航误差,本文采用基于数字高程模型(Digital Elevation Model)[9]的地形模型生成。
建立三维地形模型的过程为:
1)组织准备:根据系统仿真的需要确定模型的位置和范围,选取合适的地理数据,并对数据进行一些必要的转换与处理。
2)创建与测试:使用数字高程数据创建地形数据,并组织层次细节。测试创建好的模型,检验其是否能正常和高效的运行。
3)增加特征属性:测试正常后,决定仿真系统所需要的信息特征,在确保信息数据准确的前提下,将这些特征属性加入到数据中。
4)检验与优化:在实时仿真系统中运行,检验是否正常满足要求。并在此基础上,对数据进行进一步的优化。
最后生成的群岛模型如图4所示。

图4 基于真实地理信息的海岛模型
5 基于Vega的实时场景绘制
三维场景绘制是将建模时生成的三维几何模型,采用透视投影的方法,将其绘制到计算机屏幕上去。本文采用三维可视化视景仿真软件Vega实现虚拟场景的绘制。
基于Vega开发视景仿真程序的基本步骤[10]是:
1)利用ADF(Application Definition Files)文件进行初始化设置;
2)编写仿真程序,调用初始化系统和模块的函数,读入ADF文件中数据并装载相关的数据库,创建并配置类的实例;
3)完成初始化,调用循环函数,执行相关功能的程序库以渲染、刷新场景。
典型Vega应用程序的框架如图5所示。
Vega应用程序可以分成两个主要的阶段,首先是静态描述阶段,然后进入Vega系统的动态循环[12]。
第一个阶段主要为通过读入应用定义文件ADF对Vega系统正确运行进行必要的系统配置,包括内存分配,参数设置,Vega类的定义等。
ADF文件建立在Vega的应用开发界面LynX中完成[13],主要完成以下任务:
1)加载航行场景所需的各种模型:包括建立的舰船模型、地形模型,以及Vega中的海洋模块等航行场景中的必需元素。
2)设置调整模型对象参数:包括对象的方位、运动方式以及深度使用等一些高级功能。
3)添加环境效果:包括光源、天空、各种大气层物理现象、天体运行等等。
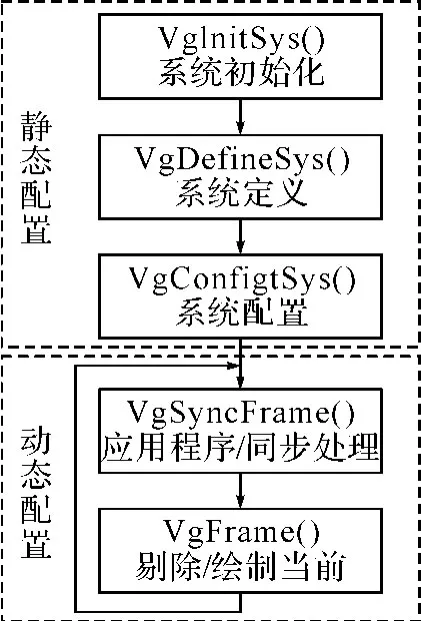
图5 Vega应用程序框架图
4)设置显示通道、窗口。
而Vega仿真应用程序主要是在第二个阶段Vega动态循环中实现的。在该阶段视景仿真系统部分通过与捷联惯导仿真部分通信得到的舰船实时信息控制虚拟船舶航行。
系统最终运行效果如图6所示。

图6 系统运行效果图
6 结语
基于虚拟现实的捷联惯性导航试验系统是惯性导航与虚拟现实技术相结合的产物。虚拟现实技术多感知性、交互性、沉浸感和想象性的引入使得系统的仿真效果相比传统的导航仿真有了质的飞跃,方便了用户深入了解不同导航系统的特性,并且提供了系统演示、教学等一系列新的应用方向。
仿真中真实地形的应用使运载体能够模拟实际运行中的航线,大大增强了虚拟可视化的真实性并使导航仿真精确度的提高成为可能。
算法和惯性器件的多样性,可以使系统实现不同的组合,辅助捷联惯导系统的快速开发,缩短开发周期。
由于条件所限,目前的捷联惯导虚拟试验系统还是桌面式的非沉浸虚拟现实系统。通过使用一些虚拟现实设备如立体眼镜、头盔式显示器、数据手套、3D跟踪设备能够大大提高系统的真实感、沉浸感以及与用户之间的交互水平。
[1]秦永元.惯性导航[M].第1版.北京:科学出版社,2006
[2]洪秉镕,蔡则苏,唐好选.虚拟现实及其应用[M].北京:国防工业出版社,2005
[3]赵玉霞.捷联惯导系统仿真算法的研究及其实现[D].大连理工大学,2005
[4]孙丽,秦永元.捷联惯导系统姿态算法比较[J].中国惯性技术学报,2006,14(3):6~10
[5]周绍磊,丛源材,李娟,等.方向余弦矩阵中四元数提取算法比较[J].中国惯性技术学报,2008,16(4):415~418
[6]罗双艳.气垫船海上运动的视景仿真技术研究[D].哈尔滨工程大学,2007
[7]李庆忠,高秀荣.三维可控真实感地形生成方法研究[J].系统仿真学报,2008,20(11):2938~2941
[8]齐敏,郝重阳,佟明安.三维地形生成及实时显示技术研究进展[J].中国图象图形学报,2000,5(4):269~276
[9]何辉明.数字高程模型DEM的建模及其三维可视化研究[D].东南大学,2004
[10]王乘,李利军,周均清,等.Vega实时三维视景仿真技术[M].武汉:华中科技大学出版社,2005
[11]孔艺权,王文娟.模拟器和虚拟机在网络协议虚拟实验的应用[J].计算机与数字工程,2008,36(7)
[12]Vegaprogrammer's guide.version 3.7.1MultiGen-Paradigm Inc.,2001
[13]Vega Lynx User's Guide Version 3.7.1MultiGen-Paradigm Inc.,2001
