纯电动汽车实验台架用直流电源稳压控制器设计
2011-06-05毕恩兴
毕恩兴
(西安铁路职业技术学院 陕西 西安 710014)
电动汽车具有高效、低噪声、零排放等显著优点,在环保和节能方面具有不可比拟的优势,其应用和普及已成为汽车工业可持续发展的必然趋势。目前国内外进行电动汽车的研究主要通过室外道路实车试验 (包括道路试验和试验场试验)、实验室台架试验和计算机仿真试验3种方式。台架实验将使汽车的研制周期缩短至原来的1/4,而实验经费仅为室外道路实车实验的1/3左右,所以建立电动汽车台架实验系统十分必要。
电动汽车台架实验系统主要由供电电源、加载装置及控制系统、测试系统、被测试对象(电机及控制器)和机械台架等组成。其结构如图1所示。

图1 电动汽车实验台架结构Fig.1 The structure of electric vehicle test bench
目前对电动汽车驱动控制系统进行台架实验所使用的供电电源大致有两种:蓄电池和大功率整流电源。不论采用何种蓄电池供电,由于蓄电池容量有限,在经过一段时间实验后,需要对蓄电池进行充电,其势必影响试验的连续性和长期性。采用大功率整流方法实现的电源系统可以从一定程度上解决实验连续性及长期性的问题,但是直接采用整流电源输出的电压波形一方面不满足蓄电池近似恒压源的输出特性,另一方面由于其纹波系数过大、高频谐波分量多、易导致输出电流不连续,进而造成直流电机额定空载转速过高,机械特性软等缺点,不利于对实际驱动控制系统进行测试[1-2]。针对以上缺点,文中采用对整流电路加大电容负载以稳定输出电压的方法,使其近似具有恒压源的输出特性,并且对其输出电压采用电压闭环PID控制,动态稳定了输出电压。具体的直流电源结构如图2所示。
1 稳压控制器硬件组成
稳压控制器主要通过单片机最小系统与信号处理电路连接,通过传感器实时采集输出电压信号,依据实时电压值闭环控制此时的输出电压使输出电压动态稳定,同时通过RS232串口与虚拟仪表进行通信实时显示此时的电源状态,具体的稳压控制器硬件结构如图3所示。

图2 直流电源结构Fig.2 The structure of DC power
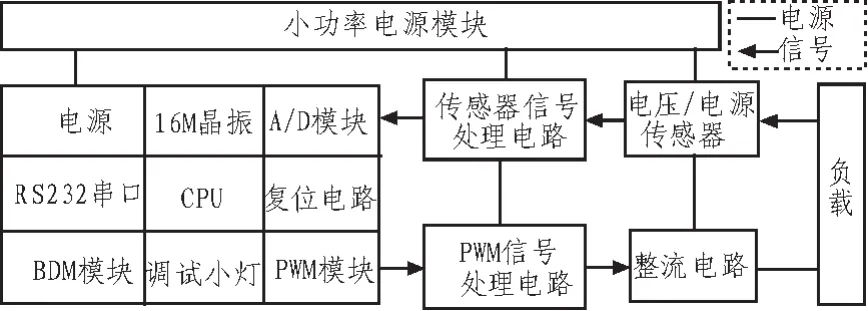
图3 稳压控制器硬件结构Fig.3 The hardware structure of regulator controller
1.1 控制器最小系统
文中采用了freescale公司生产的MC9S12DG128型16位单片机。该单片机的总线频率为8 MHz,具有256 KB FLASH程序存储器,12 KB的RAM存储器、4 KB的EEPROM,可以完成16位乘法和32位除16位的整数乘除运算指令,集成了看门狗系统、时钟监视系统。内部集成了常规的定时器、串行接口、并行接口,具备16个10位精度的模拟输入通道,具有多路数据采集器和采样保持。具备2个SCI接口以及3个SPI接口。具有BDM模式,可在线程序调试和对寄存器监视。其最小系统主要包含以下5部分[3-5]:
1)时钟电路给单片机提供一个外接的16 MHz的石英晶振。
2)串口的RS232驱动电路可实现TTL电平到RS232电平的转换。
3)BDM接口让用户可以通过BDM调试工具向单片机下载和调试程序。
4)复位电路是通过一个复位按键给单片机一个复位信号,调试过程中十分有用。
5)调试小灯和PORTB口相连,供程序调试使用。
最小系统与信号处理电路的接口采用欧式插针设计,具体的接口如图4所示。
1.2 传感器及信号处理电路
1)传感器选型
首先,稳压控制器的稳压原理是对整流电路中的输出直流电压进行测量,根据实时的电压测量值来对被控制对象进行调整从而达到稳压的目的,故快速、精准的电压测量对稳压控制而言是十分重要的[6]。其次,在测量原理的选择上应该尽量避免影响主电路的工作,因此要考虑测量电路与主电路的隔离设计。综合两方面因素,在电压、电流的测量传感器选取上采用了磁平衡式霍尔电压、电流传感器,在满足测量速度要求的同时也满足了电路隔离测量的要求[7]。具体的传感器参数如表1所示。

图4 最小系统接口Fig.4 The interface of minimum system

表1 霍尔传感器参数Tab.1 Hall sensor parameters
其中,交流电压、电流传感器分别用来测试输入电网端电压电流值,直流电压、电流传感器用来测量输出直流端电压、电流值。为了解电容的充放电情况也对电容的充放电电流进行了检测。
2)信号处理电路设计
针对文中采用的霍尔电压、电流传感器都为输入范围与输出范围呈线性关系且输出都要求为电压信号的特点。信号处理电路的设计主要从抗高频干扰、阻抗匹配、具备调零电路方便传感器校准等方面考虑。具体的信号处理流程如图5所示。对应的信号处理电路如图6所示[8]。

图5 传感器信号处理流程Fig.5 Sensor signal processing flow

图6 传感器信号处理电路Fig.6 Sensor signal processing circuit
其中,为了满足单片机A/D转换的要求,采用电压转换电路将电流信号转换为电压信号,采用二阶低通滤波器减少高频干扰,采用调零比较电路对传感器进行零点校准,采用放大电路对传感器输出进行调整使其输出最大可满足A/D转换最大电压的要求,采用稳压保护电路限制进入单片机的电压信号,采用低通滤波器减少单片机引脚处的高频干扰。
1.3 调压控制电路
采用了山东淄博整流器厂生产的MZKS-ZL-800型集成三相整流智能模块,该智能模块通过输入0~15 V的直流可调电压控制三相全控整流电路的触发角a,从而达到控制输出电压的目的。因此为了满足智能模块的控制要求,采用PWM控制方式将占空比可调的PWM信号通过D/A转换电路转换为0~15 V的可控制直流电压信号从而达到控制智能模块触发角的目的。具体的PWM信号处理流程如图7所示,PWM信号处理电路[8]如图8所示。

图7 PWM信号处理流程Fig.7 PWM signal processing flow

图8 PWM信号处理电路Fig.8 PWM signal processing circuit
其中,PWM信号由单片机的PWM模块产生,为实现阻抗匹配,采用电压跟随器作为第一级输入电路,采用二阶低通滤波器作为D/A转换电路,由于滤除了输入信号的高频分量使得输出直流信号值无法达到控制端的电压要求,因此设计采用同相比例放大电路进行信号放大。由于驱动模块要求控制信号的驱动电流要足够大,因此采用TIP142型功率放大管构成的驱动电路实现了功率放大。为保障控制端的稳定性,输出采用稳压滤波电路设计,减少了高频干扰。
2 稳压控制器软件设计
2.1 稳压控制算法
由于在实际的使用过程中,电机负载的变化有可能是突变的或者是随机的。采用整流电路直接连接直流电机的方式会由于负载的变动导致整流电路输出电压的变化,使其并不满足恒压源的特性,究其根源是由于负载的增加导致整流电压的相位发生了滞后,导致相同触发角度的情况下输出电压减小。考虑到这个因素,可以采用单片机根据整流电路输出电压值对整流电路触发角进行修正从而使输出电压动态稳定,本课题中采用了数字增量式PID控制算法。将传统模拟PID控制器的积分项、微分项分别由求和项与差分项代替就可以得到数字PID控制器的数学表达式。其表达式如公式1所示,PID控制模型如图9所示。

图9 PID控制模型Fig.9 PID control model

根据式(1)递推可得

式(1)减去式(2)可得:

式(3)中:

令:

则得到:

该算法的优点是不需要直接输出全值,e(t)不需要进行累加,故单片机故障时不会导致U(t)发生大幅度变化。
2.2 算法实现
为了稳定输出电压,故将输出电压作为反馈信号。电压反馈的数字增量式PID算法的流程图如图10所示。
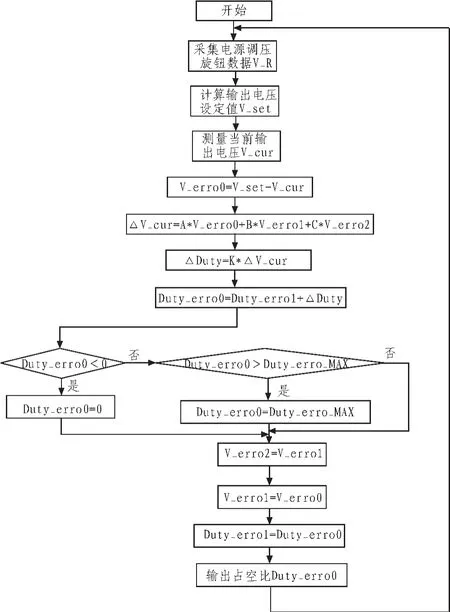
图10 数字增量式PID算法流程Fig.10 Digital incremental PID algorithm flow
其中V_R为电源调压旋钮电压的AD转换值。通过线性A/D转换,将调压旋钮电压转换为输出电压设定值V_set。通过测量当前电压输出值V_cur,将其与V_set相减得出电压差值V_erro。利用增量式PID算法得出ΔV_cur,因为控制输出电压的信号是PWM信号,所以要将电压差值转换为PWM占空比。k为转换系数,k的值等于:

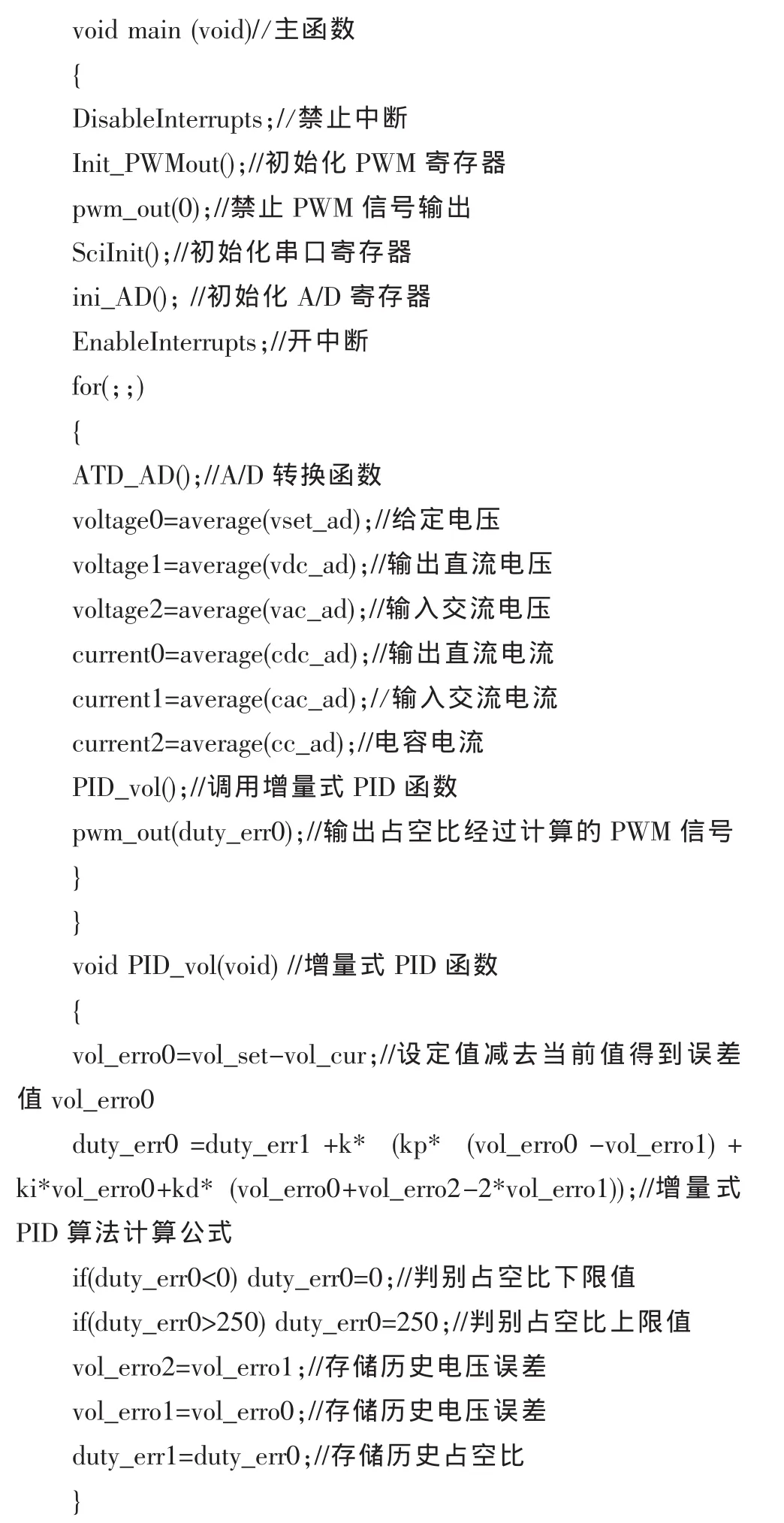
通过单位转换后得到ΔDuty占空比增量。利用上一次的占空比与占空比增量之和就可以得到将要输出的占空比。具体的数字增量式PID算法程序代码如下:
3 测试及分析
3.1 实验测试
1)无附加设备的整流电路测试
为了确认闭环稳压控制效果,以及在加大电容负载情况下的电压改良效果,首先应该保障无附加设备情况下整流电路能够可靠工作,在负载恒定的情况下通过调整电压旋钮控制三相全控整流电路输出波形如图11所示。
2)闭环控制加电容滤波
在闭环稳压控制、加滤波电容、电机负载稳定的情况下,此时由于滤波作用输出电压波形与恒压源一致,测试波形如图12所示。
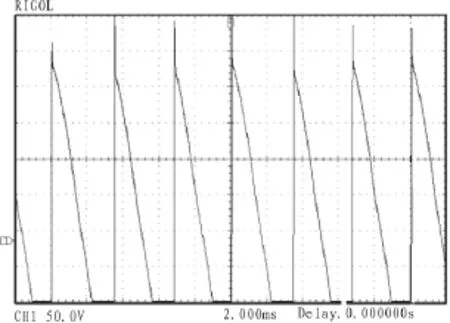
图11 无附加设备的整流电路测试波形Fig.11 The test waveform of rectifier circuit without additional equipment

图12 闭环稳压控制加电容滤波情况下的波形Fig.12 The test waveform of Closed-loop control with capacitor filter
3.2 结果分析
通过对加闭环控制、电容滤波、负载稳定情况下的输出电压波形进行测量,为对所测电压波形的纹波系数进行观察将所测电压波形进行放大,所得波形图如图13所示。
通过对输出波形进行观察,发现在负载恒定的情况下,整流滤波电源在闭环控制下输出电压比较稳定,电压抖动范围基本在1 V以内,纹波系数较小,近似可以满足恒压电源的输出特性。在电机负载发生变化的情况下,控制器会通过电压反馈PID控制自动校正整流电路的触发角,使输出直流电压值保持动态稳定。
4 结束语

图13 放大后的输出电压波形Fig.13 The amplified output voltage waveform
采用大功率整流电路代替传统蓄电池对纯电动汽车台架实验具有现实的意义。利用三相全控整流电路加滤波电容组克服了整流电路输出电压纹波过大的缺点,并采用单片机构成的智能稳压控制器,在负载变化时对整流电路触发角进行校正,从而对输出电压进行自动稳定。实验结果证明了该方法的可行性和有效性。
[1]伍乾永.一种数控直流电源的设计[J].科技信息,2010(27):462-463.WU Qian-yong.A design of numerical control DC power supply[J].Science and Technology Information,2010(27):462-463.
[2]刘杰,刘培,王琦,等.开关稳压电源系统设计[J].通信电源技术,2011,28(3):34-38.LIU Jie, LIU Pei, WANG Qi, et al.A design of switching mode power supply system[J].Telecom Power Technology,2011,28(3):34-38.
[3]邵贝贝.单片机嵌入式应用的在线开发方法[M].北京:清华大学出版社,2007.
[4]刘晓生,王宜怀.嵌入式系统使用HCS12微控制器的设计与应用[M].北京:航空航天大学,2008.
[5]孙同景,陈桂友.Freescale 9S12十六位单片机原理及嵌入式开发技术[M].北京:机械工业出版社,2008.
[6]陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社,2003.
[7]彭军.传感器与检测技术[M].西安:西安电子科技大学出版社,2003.
[8]莫力.Protel电路设计[M].国防工业出版社,2005.
