半主动液阻型橡胶隔振器动态性能测试与计算分析
2011-06-02吴礼刚段小成
吴礼刚,段小成,黄 兴,徐 驰
(1.宁波大学 信息学院,宁波 315211;2.宁波拓普制动系统有限公司,宁波 315806)
被动式液阻悬置与早期的橡胶悬置相比,明显改善了汽车的行驶平顺性和舒适性,且悬置结构尺寸小,制造安装比较简单,成本较低,又不消耗发动机功率,能够在某一段频率对发动机的振动起到很好的隔振和减振作用,因此目前得到了广泛的应用。但被动式液阻悬置和橡胶悬置一样,一旦设计完毕,其结构参数固定,动刚度与阻尼等特性不可调,使得其性能不能随发动机的转速和工况的变化作相应的变化。解决这些矛盾的有效方法是通过在线调节悬置内部参数以实现其在不同工况下的动刚度与阻尼要求。
目前主流的半主动悬置主要分为两大类:第一类是将电流变、磁流变液等新型阻尼材料应用于悬置内部通过控制外界的电流或电压以实现在不同工况下悬置的动刚度与阻尼要求[1,2,3];第二类是通过改变被动式液阻悬置内部结构,如惯性通道长度、截面积、解耦膜刚度等实现悬置动刚度与阻尼的调节[4,5]。
对半主动液阻悬置的动力学特性实验和仿真分析,已经获得人们的广泛重视。研究的重点集中在电流变或磁流变在半主动或主动液阻悬置中的应用上[1,2,3,6]。目前国内对第二类半主动液阻悬置的研究较少。本文介绍了一种解耦膜刚度可调式半主动液阻悬置内部结构,并实验测试了半主动悬置的静态特性、动刚度和阻尼及其与激振频率和激振振幅的关系;建立了该半主动液阻悬置在电磁阀断电、通电两种状态下的动特性计算分析的集总参数模型,利用该模型分析了一半主动悬置的动刚度和滞后角;计算结果和实验值的对比结果证明了模型的正确性;最后给出了半主动悬置在解决发动机怠速抖动、巡航和由于粗糙路面激励引起的驾驶员座椅振动问题的应用实例。
1 半主动液阻悬置结构及其性能实测
1.1 悬置结构及性能参数评价
图1为解耦膜刚度可调式液阻悬置的结构示意图,其中A、B两端分别与发动机和车架相连,液室隔板中间为螺旋型惯性通道,两隔板端部固定环形解耦膜,其中解耦膜上膜面与上液室液体接触,而解耦膜下膜面与下隔板组成一密闭气腔,气腔一端与大气相连通,电磁阀活塞轴向运动可控制气腔是否密闭。
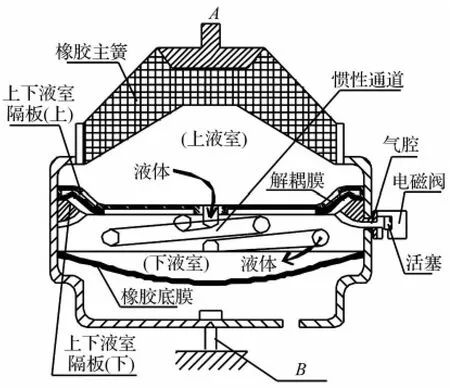
图1 解耦膜刚度可调式液阻悬置结构示意图Fig.1 SEM section with switchable stiffness decoupler
半主动液阻悬置的电磁阀端子与发动机控制单元(ECU)连接,ECU根据发动机转速控制电磁阀的通断,通过接通和关闭悬置内部空气通道来控制悬置的动态特性。
当电磁阀通电,电磁阀活塞在电磁力的作用下堵住气腔,此时解耦膜下膜面与气腔呈现类似空气弹簧的效果,解耦膜整体刚度变高;由于解耦膜刚度的提高会引起上液室体积刚度的变高,半主动液阻悬置会表现出大刚度、大阻尼特性。
当电磁阀断电,电磁阀活塞在复位弹簧的作用下使得解耦膜下膜面的气腔与大气相通,解耦膜整体刚度变小;由于解耦膜刚度的降低会引起上液室体积刚度的降低,液阻悬置在受到外界激励时会表现出小刚度、小阻尼特性。
半主动液阻悬置动特性的实验参考文献[7]在电液伺服激振实验台上进行,其动特性常用动刚度Kd和滞后角φ来表征。
1.2 半主动液阻悬置静、动态性能测试结果
半主动液阻悬置的静态、动态特性的测试是在宁波拓普测试中心MTS831振动实验台(见图2)进行的,实验方法、数据处理方法与常规液阻悬置类似[7]。
由图3可见,电磁阀通电时半主动液阻悬置静刚度比电磁阀断电时对应的静刚度略大,这是由于电磁阀通电时解耦膜下膜面与气腔组成密闭的气腔导致解耦膜刚度提高所致。电磁阀断电时解耦膜刚度有所降低从而导致悬置静刚度变低。
图2 半主动液阻悬置静态、动态测试示意图Fig.2 Static and dynamic performance test sketch of SEM
图4与图5给出了半主动液阻悬置主方向(轴向)受到不同振幅激励时的动态特性。由图可见,半主动液阻悬置的动刚度和滞后角随激振振幅和频率变化而变化,并且在电磁阀通电或断电状态下悬置的动刚度和滞后角各有差异。
低频大振幅激励下,电磁阀断电时悬置滞后角峰值频率为5 Hz,所对应的滞后角为20°,30 Hz处对应的动刚度为280 N/mm;而电磁阀通电时悬置滞后角峰值频率为9 Hz,所对应的滞后角为60°,30 Hz处对应的动刚度为500 N/mm。可见电磁阀通电与否对悬置的动刚度与滞后角影响较大:电磁阀通电时悬置动刚度、滞后角峰值频率与其滞后角峰值均比电磁阀断电时要高。汽车受到大振幅路面激励(如通过粗糙路面等)时电磁阀自动通电,可以充分利用半主动液阻悬置的大刚度、大阻尼特性以衰减路面激励引起的车内振动。
式中:H —循环泵设计扬程(m);HST—静扬程(m);∑hS —吸压水管路的水头损失(m);∑hd—输水管路的水头损失(m);Hsev—控制点最小自由水压(m)。
高频小振幅激励下,电磁阀断电时所对应的动刚度比电磁阀通电时的要小约一半,在汽车怠速工况下,由于发动机本身产生的激励主要为高频小振幅激励,因此可以充分利用半主动液阻悬置电磁阀断电状态下的小刚度、小阻尼特性以利于发动机隔振。
2 半主动液阻悬置动态特性计算分析
根据半主动液阻悬置的工作原理,可将其简化为如图6所示的集总参数模型,图中Kr、Br为橡胶主簧的刚度和阻尼系数。橡胶主簧的作用有两个,一是承受动力总成的静、动态载荷;二是起类似活塞的作用,使液体在上、下液室之间来回流动,用等效活塞面积Ap来表示该特性。
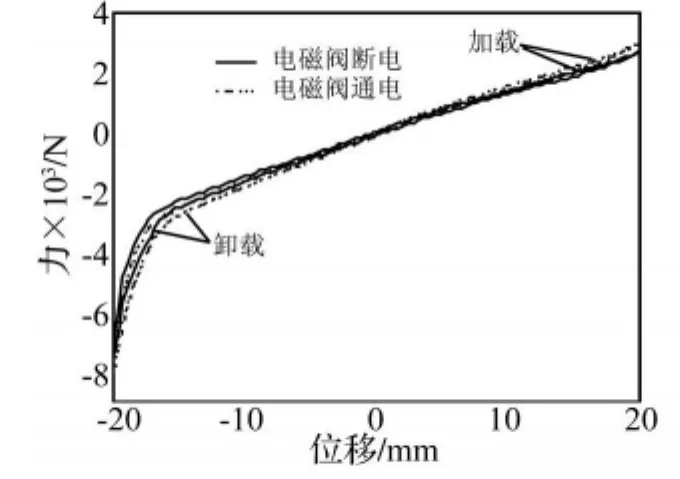
图3 半主动液阻悬置静态特性Fig.3 Displacement-force characteristics of SEM
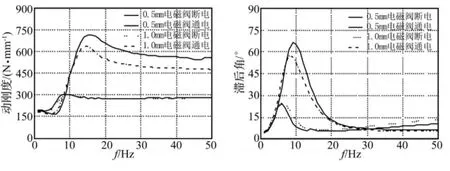
图4 半主动液阻悬置低频大振幅激励下动态特性Fig.4 SEM dynamic characteristics under low frequency and high amplitude excitation
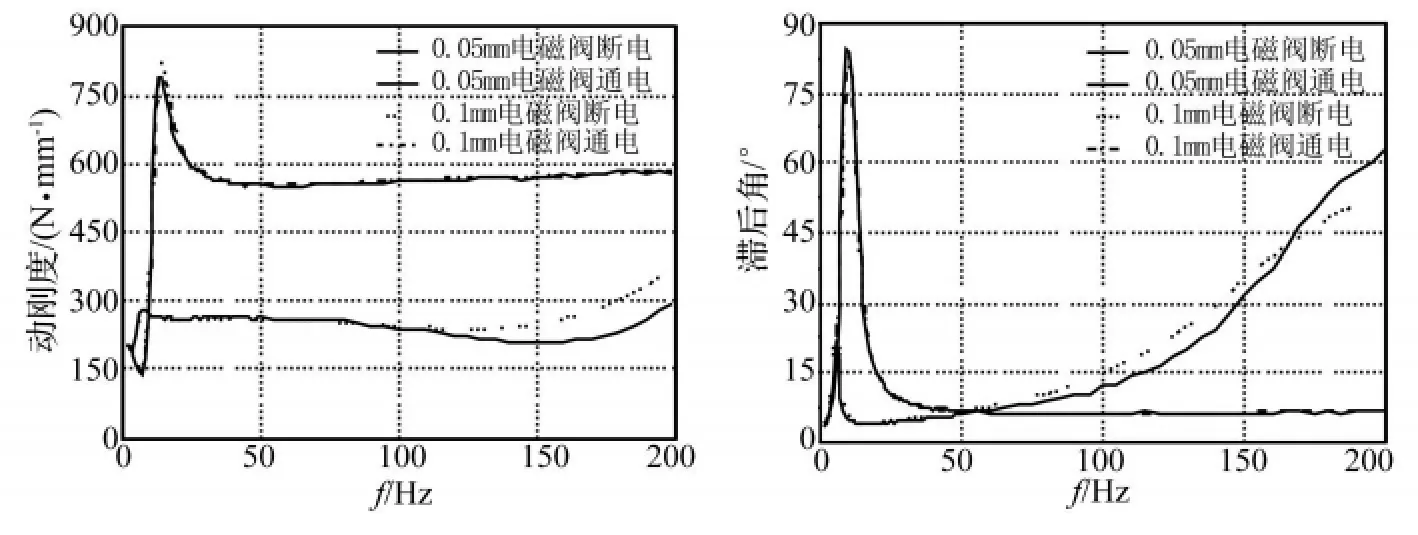
图5 半主动液阻悬置高频小振幅激励下动态特性Fig.5 SEM dynamic characteristics under high frequency and low amplitude excitation
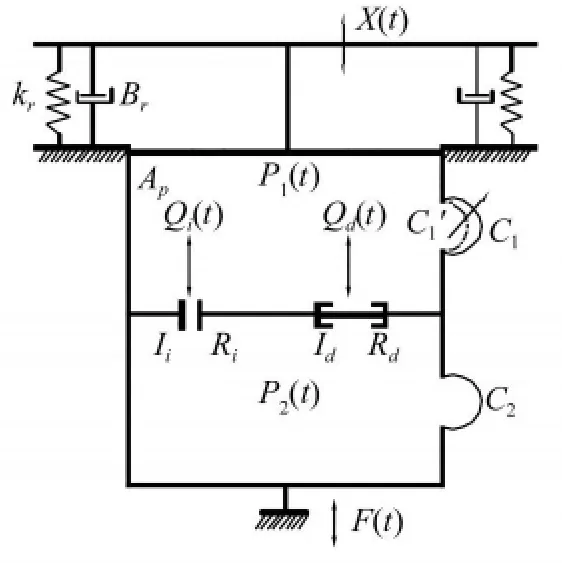
图6 半主动液阻悬置集总参数模型Fig.6 LP model of SEM with switchable decoupler
橡胶主簧在泵吸液体的过程中,由于上液室液体的压力使其有一定的膨胀,橡胶主簧的这种膨胀特性用体积柔度量来表示,定义为其体积的变化与作用其上压力的变化之比,即ΔV/ΔP,单位为m5/N,体积柔度的倒数定义为橡胶主簧的体积刚度,单位为N/m5。对本文的半主动液阻悬置而言,其橡胶主簧的体积刚度由主簧结构、液体粘度、解耦膜刚度等因素共同决定,因此在电磁阀接合与断开两种状态下,由于解耦膜刚度的大小不一致导致橡胶主簧的体积刚度也不一样。在图6所示的模型中,电磁阀断电时橡胶主簧的体积柔度用C1表示(其体积刚度为K1=1/C1);电磁阀通电时橡胶主簧的体积柔度用C'1表示(其体积刚度为K'1=1/C'1),K'1>K1。橡胶底膜的体积柔度用C2表示(其体积刚度K2=1/C2),由于橡胶底膜的厚度很薄(通常为2 mm左右),因此可以认为C2至少比C1(或C'1)大两个数量级[8,9],假定上下液室的压力为均匀分布[8,9],并以 P1(t)、P2(t)表示,Qi(t)、Qd(t)分别表示液体流经惯性通道的流量和随解耦盘运动的液体量。
定义Ii、Ri为惯性通道中液体的质量系数和惯性通道对其中液体流动的流量阻尼系数,Id、Rd为解耦盘及其附连液体的质量系数和液体对解耦盘的流量阻尼系数。Ii、Id、Ri、Rd的定义式为:

式中,Mi为惯性通道中液体的质量,Md为解耦盘及其附连液体的质量,Ai、Ad分别为惯性通道横截面积和解耦盘的面积,Bi为惯性通道对其中液体流动的速度阻尼系数,大小取决于液体的粘度、惯性通道的形状和壁面的粗糙度等,Bd为液体对解耦盘运动的速度阻尼系数,大小取决于液体的粘性、解耦盘结构尺寸等。
由液体的连续方程可得[7,8,10]:

由液体的动量方程可得:

传递到固定端的力F(t)为:

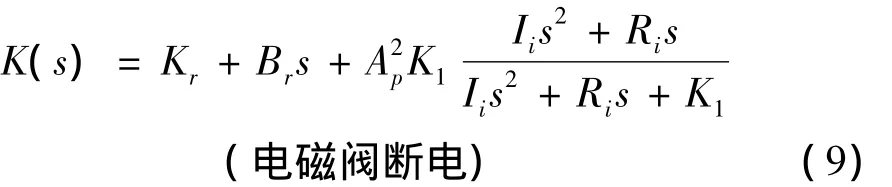
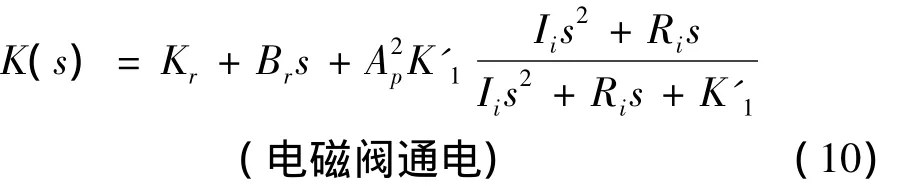
对式(4~8)进行傅里叶变换可得液阻悬置的复刚度:

在低频大振幅激励下,令Qd=0,得到液阻悬置的复刚度为[10]:

由于橡胶底膜主要起密封作用,且橡胶底膜的厚度很薄(2.5 mm),因此,下液室的体积刚度K2很小,可以忽略不计。令K2=0,可得:
半主动液阻悬置集总参数模型动特性仿真时所需的一些几何参数,如惯性通道的横截面积,解耦盘的面积等较容易测得,对于形状比较规则的惯性通道,其中液体的质量或者惯性系数可以通过计算的方法得到;可以由流体力学中的一些经验公式计算得到惯性通道对其中液体流动的流量阻尼系数和液体对解耦盘运动的流量阻尼系数,但往往不够准确;橡胶主簧体积刚度是液阻悬置动特性仿真时的一个重要参数,一般通过通过实验的方法得到[8,9]。
图7为利用公式(9)和(10)计算得到的半主动液阻悬置在振幅1.0 mm下的动态特性和实验值的对比曲线,计算所用的参数为:Kr=1.86e5 N/m,Br=0.236 Ns/m,Ap=0.0073 m2,Ii=8.506e5 kg/m4,Ri=2.61e7 Ns/m5,K1=1.36e9 N/m5,K'1=4.22e9 N/m5。由图可见,电磁阀通、断电状态下计算的动刚度值、滞后角峰值与峰值频率等与实验值基本吻合,证明了文中所建立的半主动液阻悬置集总参数模型的正确性。
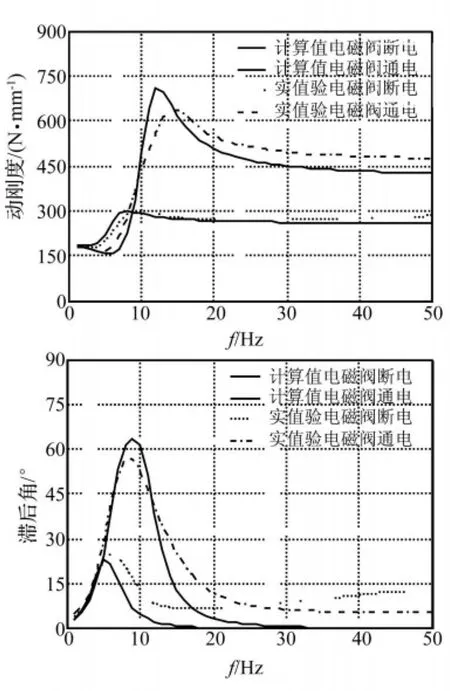
图7 半主动液阻悬置动特性计算值与实验值对比(激振振幅:1 mm)Fig.7 SEM dynamic characteristics comparisons between test and calculation under 1.0mm amplitude excitation
3 半主动液阻悬置在汽车动力总成悬置系统中的应用
对图8所示的一动力总成安装了半主动液阻悬置的汽车分别进行怠速、100km/h巡航与2-Poster大振幅扫频试验。汽车在正常怠速工况下,半主动悬置电磁阀断电,悬置呈现小刚度小阻尼特性;在正常行车工况下,若发动机转速高于设定值(如900 r/min),则电磁阀通电,悬置呈现大刚度大阻尼特性。
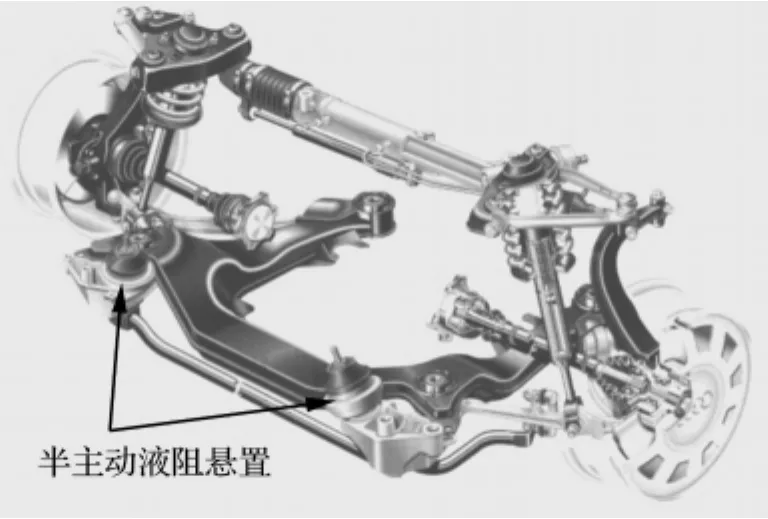
图8 半主动液阻悬置在动力总成悬置系统中的应用Fig.8 SEM application in powertrain mounting system
由图9可见在发动机怠速工况下由于半主动液阻悬置电磁阀断电时悬置表现的小刚度、小阻尼特性,有利于隔振,因而对应的驾驶员座椅Z向振动最小;电磁阀通电时悬置表现的大刚度、大阻尼特性不利于发动机隔振,因此其座椅Z向振动最大;而被动式液阻悬置与半主动液阻悬置通电状态的动特性类似,故其座椅Z向振动也偏大。
由图10可知100km/h巡航工况,当电磁阀通电时由于半主动悬置呈现通电状态下的大刚度、大阻尼特性,大刚度有利于控制动力总成位移,大阻尼有利于衰减路面的低频激励,因此所对应的驾驶员座椅Z向振动最小;电磁阀断电状态下悬置表现小刚度、小阻尼特性既不利于控制动力总成位移,也不利于衰减路面激励,故座椅振动最大;被动式液阻悬置的动刚度与阻尼介于半主动悬置电磁阀通、断电状态之间,故对应的座椅振动也介于两者之间。
图11为模拟汽车低速通过粗糙路面工况在室内NVH试验室进行的2-Poster台架前轮扫频试验,试验结果与汽车巡航工况所对应的驾驶员座椅Z向振动变化趋势一致。
从上述整车NVH试验结果看,采用半主动悬置时驾驶员座椅Z向振动加速度峰值可降低50%以上,大大改善了车内振动水平。
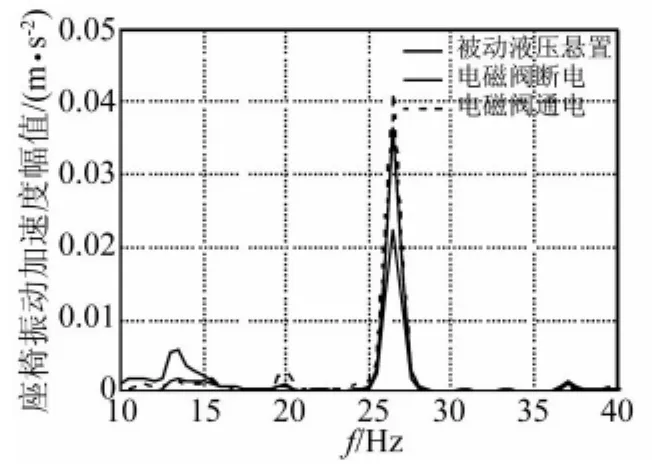
图9 怠速驾驶员座椅Z向振动Fig.9 Driver’s seat rail vibration in Z direction at Idle
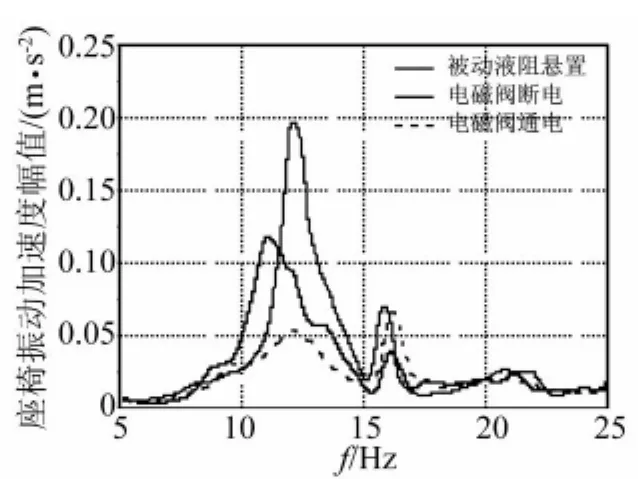
图10 100km/h巡航工况驾驶员座椅Z向振动Fig.10 Driver’s seat rail vibration in Z direction at 100 KPH cruise
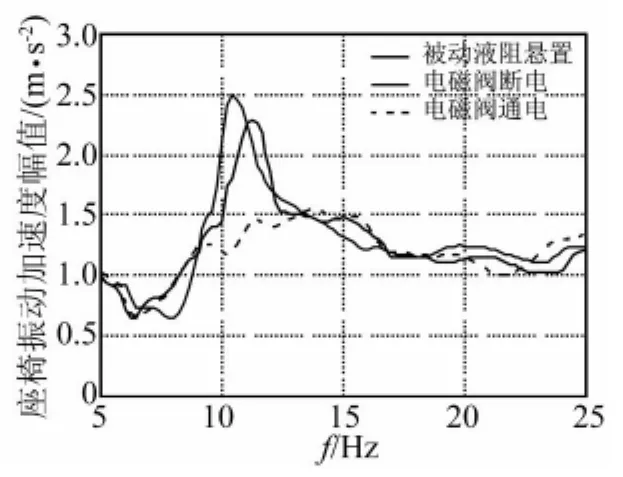
图11 2-Poster大振幅(2 mm)扫频激励下驾驶员座椅Z向振动Fig.11 Driver’s seat rail vibration in Z direction at 2-Poster with 2.0mm amplitude excitation
4 结论
本文论述了在汽车动力总成悬置系统中半主动液阻悬置的产生背景,实验测试了一解耦膜刚度可调的液阻悬置的静动态特性,揭示了半主动液阻悬置在电磁阀断电、通电状态的静动态特性。建立了低频大振幅激励下的半主动液阻悬置动特性计算分析的集总参数模型,利用该模型计算分析了一典型半主动液阻悬置的动刚度和滞后角,计算结果和实验值的对比证明了模型的正确性。最后给出了半主动液阻悬置用于解决汽车怠速、巡航与粗糙路面激励工况等NVH问题的应用实例。
[1]Choi S B,Hong S R.Dynamic Modeling and Vibration Control ofElectrorheologicalMounts [J]. Journalof Vibration and Acoustics,2004,126:537 -541.
[2]Lee B H,Lee C W.Optimal Design of Electromagnetic Type Active Control Engine Mount in Consideration of Actuator Efficiency[J]. SAE Technical Paper Series 2007-01-2424.
[3]Ciocanel C,Nguyen T,Schroeder C,et al.Performance Evaluation of a Semi-Active Magnetorheological Mount[J].SAE Technical Paper Series 2008-01-0429.
[4]Truong T Q,Ahn Y K,Ahn K K.Optimal Switching Parameter Control of Semi-Active Engine Mount[C].ICCASS2005,Korea.
[5]上官文斌,宋志顺,张云清,等.多惯性通道型液阻悬置动态特性的实测与分析[J].振动工程学报,2005,18(3):318-323.
[6]汪建晓,孟 光.磁流变液阻尼器用于振动控制的理论及实验研究[J].振动与冲击,2001,20(2):39-45.
[7]吕振华,上官文斌,梁 伟,等.液阻型橡胶隔振器动态特性实验方法及实测分析[J].中国机械工程,2003,15(2):182-186.
[8]Kim G,Singh R.Nonlinear analysis of automotive hydraulic engine mount [J]. Journal of Dynamic systems,Measurements,and Control,1993,115:482 -487.
[9]Geisberger A,Hajepour A K,Golnaraghi F.Nonlinear modeling of hydraulic mounts:Theory and experiment[J],Journal of Sound and Vibration,2002,249(2):371-397.
[10]Flower W C.Understanding Hydraulic Mounts for Improved Vehicle Noise,Vibration and Ride Qualities[J].SAE Technical Paper Series 850975.
