2D数字伺服阀的动态特性试验研究
2011-05-28邹正佳陈夷平
邹正佳,李 胜,阮 健,陈夷平
(浙江工业大学 机械制造及自动化教育部重点实验室,浙江 杭州 310032)
在电液伺服控制系统中,电液伺服阀是一个关键控制元件.它起着机电转换及信号放大的作用,在很大程度上对整个系统的性能起到决定性的影响,同时也决定了电液伺服系统不同的控制方式.2D数字伺服阀是电液伺服阀的一种,2D数字伺服阀除传统数字阀应具有的优点(可直接与计算机连接、不需要D/A转换器、结构简单、重复性好、功耗小、工作稳定可靠等)外[1],相对其他伺服阀更具有抗污染能力强、响应速度快、构成导控阀导控级的零位泄露(伺服螺旋机构泄漏)极小、无滞环、无死区以及良好的动静态特性等优点[2].
电―机械转换器作为连接电气元件和机械元件的桥梁,是电液伺服阀的核心元件,其性能的优劣直接关系到电液伺服阀的整体性能的好坏[3].2D数字伺服阀的动态性能除受阀体本身机械结构的频响影响外,很大程度上受电―机械转换器频响的制约.当阀体设计完成后,电―机械转换器的高频响是决定其实现的极为重要的因素.所以提高电―机械转换器的频响是实现2D数字伺服阀高频响的前提.2D数字阀选择步进电机作为电―机械转换器.
1 2D数字伺服阀的结构与工作原理
本实验采用的阀为三位四通2D数字伺服阀,其结构示意图如图1所示.2D数字伺服阀是由阀体、电―机械转换器、传动机构及位置传感器等组成.传动机构主要是用来连接电―机械转换器与阀芯,位置传感器是用来实时检测步进电机转子的角位移.
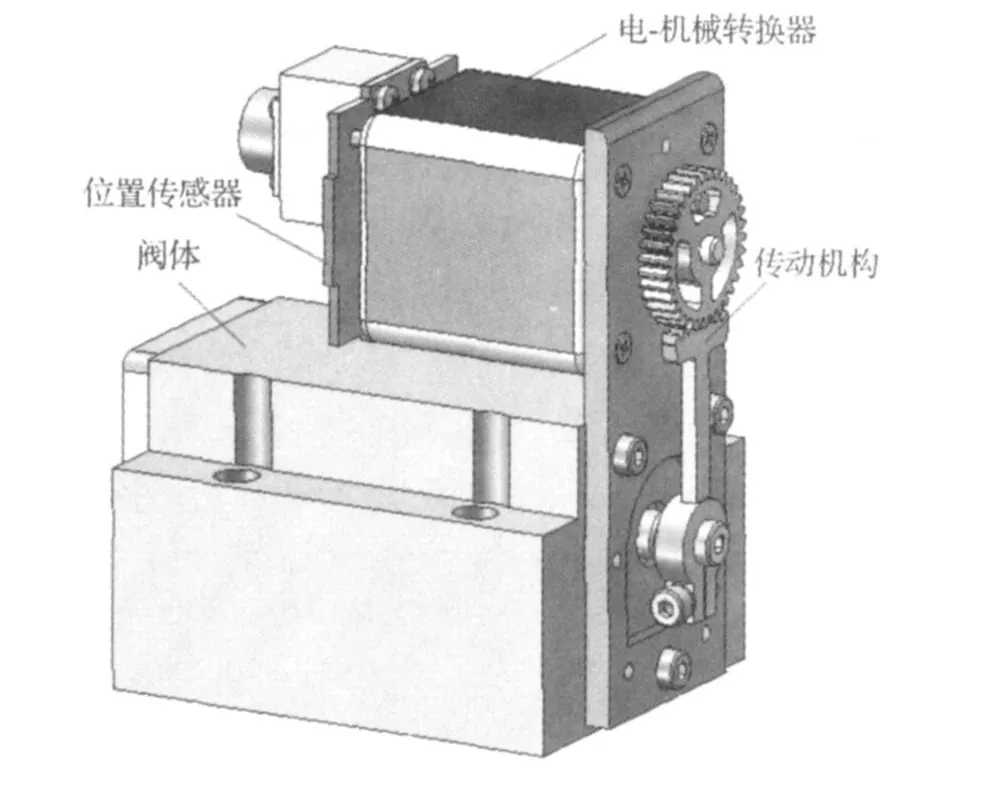
图1 2D数字伺服阀的示意图Fig.1 Construction Schematic diagram of 2D digital servo valve
1.1 2D数字伺服阀的工作原理
2D数字伺服阀是指利用阀芯双运动自由度及伺服螺旋机构设计的数字伺服阀[2].本实验采用的阀为三位四通2D数字伺服阀,其工作原理如图2所示.最左边是敏感腔,在阀芯的左端台肩上轴对称的开有一对与进油口相通的高压孔和一对与回油口相通的低压孔,在阀套左端内壁轴对称的开有两个螺旋槽.在初始位置,螺旋槽位于高压孔与低压孔的中间位置,此时流过高压孔与低压孔的油液平衡.当电―机械转换器带动阀芯顺时针转过一角度,如图2(a)所示,则高压孔的遮盖面积比低压孔的遮盖面积大,此时敏感腔的压力比右腔压力小,阀芯向左移动.随着阀芯向左移动,高压孔的遮盖面积逐渐变小,低压孔的遮盖面积逐渐变大,左右两腔的压力趋于平衡.当电―机械转换器带动阀芯逆时针转过一角度,如图2(b)所示,则敏感腔压力上升,阀芯右移[4-5].

图2 2D数字伺服阀的工作原理Fig.2 Working principle of 2D digital servo valve
1.2 电―机械转换器的工作原理
2D数字阀的电―机械转换器采用二相混合式步进电机.混合式步进电机又称感应子式同步电机,是一种低速的同步电动机,其工作原理如图3所示.在其A相与B相线圈中通入相位差为90°的正弦波电流,便会对转子产生类正弦波(因磁路的非线性不是严格的正弦波)的驱动力矩 TA和TB,该力矩合成后驱动转子使其角位移发生变化.

图3 混合式步进电机的工作原理Fig.3 Working principle of hybrid stepping motor
采用混合式步进电机作为电―机械转换器具有阀体设计结构简单,并且在工作过程中电机转子每运行半个齿距角,输入-输出的单调比例控制特性便重复一次.工作行程内的多次重复,将使非线性及摩擦力的影响被限制在很小的范围内,因此能得到较为理想的定位精度[6-7].但是在工作过程中,在任意输入信号的作用下,要求失调角大小必须保持在半个齿距范围内快速响应,否则将造成转子失步.解决方法是设计专门的嵌入式控制器对转子的输出角位移保持对输入信号实时跟踪控制.
设计的控制器的功能框图如图4所示.该控制器采用DSP(TMS320F2812)芯片设计的双闭环系统,一是位置反馈闭环,实时读取电机转子的角位移θ;一是相电流反馈闭环,实测两相电流的合成的旋转磁场的相位θm;然后计算出二者的差值得到失调角θm-θ,使其大小保持在半个齿距角范围内快速响应.为了保证步进电动机作为电―机械转换器既有较高的响应速度,同时又保证其具有较高的定位精度,步进电动机应采用同步电机的控制方法,在其定子各相通入一定相位差的连续变化的正弦电流,保证转子的输出角位移可以快速跟踪输入信号的变化.

图4 控制器功能框图Fig.4 Function block of controller
2 2D数字伺服阀的阀动态特性实验研究
动态特性是指在最大阀开口的25%,输入不同频率的正弦信号,得出阀芯位移的波形.为了测量阀的动态特性,专门设计了一样阀,并搭建了实验平台,如图5所示.实验平台包括标准的液压系统实验平台,2D数字伺服阀(其中包括电―机械转换器,选用混合式两相步进电机,其型号为FL42STH47-1684MA),无接触式磁感应位移传感器(AS5045),激光位移传感器(LK-GD500),信号发生器(Agilent 33250A),记录示波器(Agilent DSO6014A),工控机等.实验原理为:信号发生器产生一定幅值和频率的正弦信号传给2D数字伺服阀控制器,经嵌入控制器的控制算法处理后,DSP处理器中的EVA模块输出4路PWM波形控制混合式两相步进电机旋转运动,步进电机的轴通过传动机构与阀芯相连,再利用流过阀芯的油压,从而将步进电机的旋转运动转换成阀芯的轴向运动.通过激光位移传感器把阀芯位移传给记录示波器进行数据记录.在必要的时候通过工控机实行在线调节PID参数,避免重复往DSP中烧写程序的麻烦.输入正弦波的幅值为最大阀开口25%情况下,不同频率下的阀芯位移波形如图6(a-d)所示.



图6 2D数字伺服阀的动态特性Fig.6 Dynamic response of 2D digital servo valve
分析波形得出:由于阀的机械结构的影响,阀的波形在高频时明显不如电―机械转换器的波形.随着频率的增加,阀的相位滞后越来越严重,在140 Hz时,相位滞后已经超过90°.结合阀的幅频特性图7可以得出阀在-3 dB时的频宽约为130 Hz.

图7 2D数字伺服阀的幅频特性Fig.7 Amplitude-frequency characteristic of valve
3 结 论
设计专门的嵌入式控制器对转子的输出角位移保持对输入信号实时跟踪控制,解决了2D数字伺服阀采用混合式步进电机作为阀电―机械转换器存在的问题.保证了在工作过程中,在任意输入信号的作用下,失调角大小保持在半个齿距范围内快速响应,并且能精确定位,实现对输入信号的实时跟踪控制.分析实验结果表明:2D数字伺服阀具有良好动态特性,响应速度快,定位精度高.但随着频率的增大,相位滞后增大,阀芯位移幅值衰减增加.在幅值为25%的最大阀开口的正弦输入信号下,对应-3 dB的频宽约为130 Hz.
[1] 骆涵秀,李世伦,朱捷,等.机电控制[M].杭州:浙江大学出版社,2003.
[2] 阮健.电液(气)直接数字控制技术[M].杭州:浙江大学出版社,2000.
[3] 王传礼,袁桂峰.阀用电―机械转换器的应用研究[J].安徽理工大学学报:自然科学版,2005,12(25):41-44.
[4] 刘乃新.气液弹射机构的设计与关键控制元件的研究[D].杭州:浙江工业大学,2009.
[5] 易际研,李胜,阮健.2D数字伺服阀的频率特性研究[J].机床与液压,2009,37(11):67-70.
[6] BU RTON R,RUAN Jian,UKRAINETZ P.Analysis of electromagnetic nonlinearities in stage control of a stepper motor and spool valve[J].Journal of Dynamic Systems Measurement and Control,2003,125:405-412.
[7] RUAN Jian,BURT ON R,UK RAINETZ P.Some experimental considerations of stage control in digital valves[J].The Fluid Power and Systems Technology Division,2002,9:55-62.
