低惯量耐高压直动式电磁铁的静态特性仿真分析
2011-05-28鲁立中
鲁立中,孟 彬,阮 健
(浙江工业大学 特种装备制造与先进加工技术教育部重点实验室,浙江 杭州 310032)
近来,电液伺服技术与信息控制技术的结合越来越紧密,数字阀通过直接接口计算机,能够减少外部环境的干扰,输出量准确,可靠.通过引入先进的控制算法,全面提升电液伺服阀的动静态特性.电-机械转换器是数字阀的关键元件,其功能是将输入的控制信号转换成相应的阀芯转角或位移,其性能的优劣直接影响数字阀的品质.常规的电液数字阀用电-机械转换器,为按照交流伺服方式控制的混合式步进电机[1],为了实现从步进电机的旋转运动到数字阀阀芯直线运动的转换,必须在电机和液压阀阀体之间增加丝杠或凸轮等机械转换环节[2],而机械转换环节的存在不仅使得阀的结构复杂,而且带来了一系列的间隙、摩擦和磨损问题,导致控制上未知的死区和零点漂移,会造成液压系统大的误差[3];另外,其控制线圈与转子工作腔之间并无密封耐高压结构,油液一旦进入工作腔,控制线圈将会浸入油液里而损坏,因此无法在湿式状态下工作;再者,常规的混合式步进电机的转子为实心硅钢片叠压而成,其转动惯量大,响应速度较慢,从而限制了阀以至整个电液伺服系统的频宽,因而对于需要快速动态响应的使用场合并不适用.
针对目前传统旋转式商用步进电机在电液控制领域应用的不足,笔者提出了一种耐高压低惯量直动式电磁铁新结构,并且基于有限元方法建立了数学模型,通过理论分析和仿真探讨了其静态特性.
1 结构及工作原理
低惯量耐高压直动式电磁铁,主要由轭铁部件、衔铁部件、前后端盖和激磁线圈组成(图1),衔铁部件包括衔铁和推杆,衔铁安装在推杆上,推杆通过直线轴承支撑在前后端盖中,轭铁部件由四块轭铁组成,通过在隔磁环上开槽安放密封圈,可以使控制线圈不受高压油侵蚀,实现在湿式环境下工作;由于电磁刚度的存在,该直动式电磁铁无须象传统的电-机械转换器那样外加大刚度的机械弹簧,从而使数字阀结构得以简化;为降低运动惯量,提升电-机械转换器的动静态品质,衔铁采用空心杯形状;圆筒形结构,磁路对称性好,容易做到基本消除径向磁拉力,因此推力对衔铁重量的比值得以提高;为改善工作稳定性,永磁体采用高内禀矫顽力N35稀土永磁材料,轴向磁化成N极和S极;轭铁部件和衔铁采用高磁导率较高饱和磁感应强度软磁合金1J50,推杆和前后端盖则由非导磁材料制成.

图1 直动式电磁铁结构简图Fig.1 Structural drawing of direct drive electromagnet
四块轭铁的内圆周面均开有轴向均匀分布的多个小齿(图2),且四个轭铁的齿数相同;第一轭铁和第二轭铁之间的距离Gt和第三轭铁和第四轭铁之间的距离相等,且第一轭铁和第二轭铁之间的距离为齿距的整数倍;永磁体的轴向尺寸St符合以下关系:

式中:bt为齿宽;λt为齿距;K 为任意正整数.
而衔铁的外圆周面上同样开有轴向均匀分布的多个小齿,其齿距要求和轭铁的齿距相等.由此保证第一轭铁的齿和衔铁的齿对齐时,第三轭铁和第四轭铁的齿中心分别都正好处在衔铁齿中心和槽中心之间,为电—机械转换器下一步运动做好位置准备.四块轭铁组成4个磁极,与衔铁的外圆周面共形成4个有效工作气隙.当控制线圈不通电时,磁场中只有永磁体产生的磁通,在理想的没有漏磁的情况下,以图2所示位置为例,当极3下齿对齐时,衔铁受到极1和极2的磁力相反,由于极2靠近永磁体,因此衔铁受到向左的力大一些,但是此刻极3下的磁力提供电-机械转换器一个电磁刚度,起到了弹簧的作用,即衔铁如果偏离了稳定平衡点一个微小距离,极3下工作气隙内能立即提供一个与偏离方向相反的力使其保持位置不变.因此,在没有外力的情况下,总是会有一个极上的齿和衔铁的极对齐,并保持稳定.

图2 直动式电磁铁工作原理简图Fig.2 Working principle of direct drive electromagnet
当控制线圈通电时,电流控制磁场和永磁极化磁场在各级下的工作气隙中差动叠加,根据不同的通电方式而增强或者减弱相应极下的磁场力,从而推动衔铁正反双向运动[4].倘若两个控制线圈同时通入相位差为90度的正弦波电流,则可实现衔铁的平滑均匀的连续运动[5].
2 理论分析和仿真
在静态磁场情况下,麦克斯韦方程组可以简化[6]为

式中:B为磁感应强度;H为磁场强度;J为电流密度.
磁矢位:B=▽×A在电流励磁的条件下,满足泊松方程▽2A=-μ J.
电磁场的分析和计算通常可以归结为求微分方程的解,静磁学问题需要确定边界条件以使得解唯一.边界条件即表达场的边界所处的物理情况,最常用的是两种:
(1)Dirichlet边界条件 :φ|Γ=g(Γ),也称为约束边界条件或本质边界条件,规定了边界处势的分布,其中 Γ为Dirichlet边界;g(Γ)是位置函数.
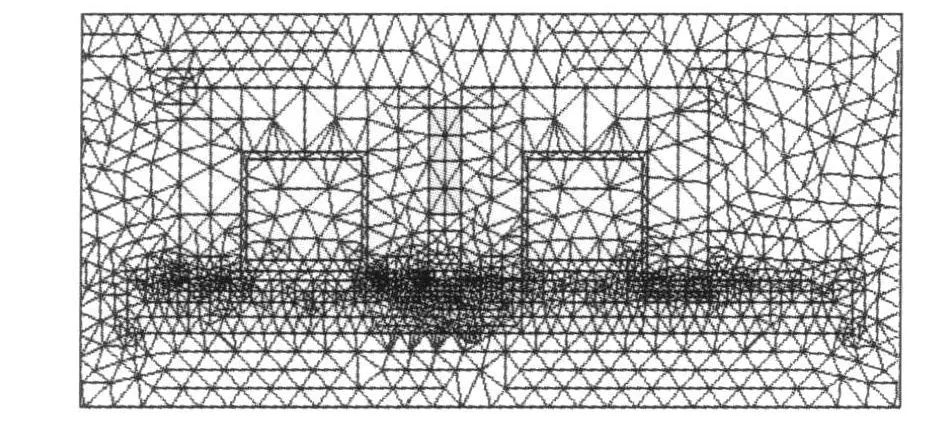
图3 有限元仿真模型Fig.3 Finite element simulation model
通过Ansoft对所建立的模型进行求解计算,可以得到电磁铁的磁场分布图,得以进一步分析电磁铁的静态特性.图4为衔铁处于一稳定平衡点位置时,不同控制电流时的磁场分布图.仿真参数设置如下:电磁铁的控制线圈匝数为100.由于电磁铁结构是圆筒形,从图4中可以看到,磁力线从气隙中通过,经永磁体、轭铁和衔铁构成闭合回路,若衔铁离开平衡位置,气隙内的磁场变化,磁通作用于衔铁轴向合力将发生改变,推动衔铁向零位移动.当控制线圈通入某一极性的控制电流后,永磁体产生的磁场和控制线圈产生的磁场发生差动叠加,使得衔铁朝磁场增强的方向移动.
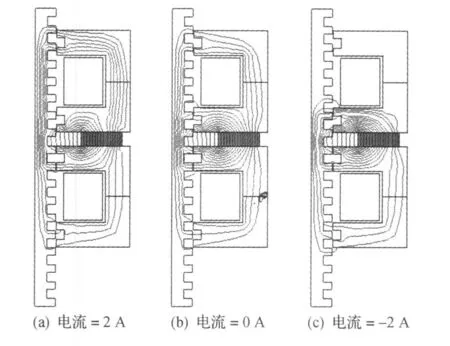
图4 不同控制电流时的磁场分布图Fig.4 Magnetic field distribution generated by different currents
通过改变控制线圈产生的磁动势,大小为NI,其中:N为线圈匝数,I为控制电流.得到电磁铁在不同控制条件下的力位移特性,如图5所示.当电磁铁处于工作状态时,其力位移特性近似为正弦波形.从图5中可以看到,增大控制电流或增加线圈匝数都有利于波形的改善和输出力的增加.因此在设计过程中,控制线圈产生的磁通需要和永磁体的磁通进行匹配,否则不合适的控制电流会对数字阀的伺服控制带来困难.图6是衔铁在图4位置时,不同控制条件下衔铁受到的推力,从图6中可以看出,当线圈匝数确定时,一定范围内,输出推力与控制电流的大小具有较好的线性度,但是当电流过大或控制电流产生的磁场和永磁体产生的磁场同向的时候,输出推力将不再线性变化.
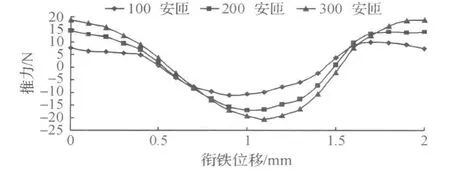
图5 静态力位移特性Fig.5 Static force-displacement characteristic

图6 力—电流特性Fig.6 Force-current characteristic
3 结 论
提出了一种新型直动式电—机械转换器,具有耐高压,运动惯量小的特性,使用了高磁导率的铁镍合金和高磁能积的钕铁硼作为软磁材料和永磁体以增大输出的电磁力矩.理论分析和仿真结果表明,该直动式电—机械转换器具有线性的力位移特性和较大的输出力,可用于直接驱动数字阀,具有工程实用价值.
[1] BU RTON R,RUAN Jian,UKRAINETZ P.Analysis of electromagnetic nonlinearities in stage control of a stepper motor and spool valve[J].J Dyn Sys M eas Control,2003,125(3):405-413.
[2] 裴翔,杨继隆,郑家锦,等.直动式电液数字伺服阀性能分析研究[J].浙江工业大学学报,2001,29(1):30-33,39.
[3] 王成宾,权龙.直线步进电机闭环控制的数字阀研究[J].机床与液压,2008.36(11):92-95,66.
[4] 孟彬,阮健,邢彤,等.耐高压低惯量直动式电-机械转换器:中国,ZL200920116954.3[P].2010-01-20.
[5] 丁志刚,蒋黔麟,陶志鹏.微特直线电机及其控制[M].杭州:浙江大学出版社,1987.
[6] GURU B S,HIZIROGLU H R.Electromagnetic field theory fundamentals[M].2nd ed.Beijing:China M achine Press,2005.
