开关磁阻电机考虑互感下仿真模型的建立
2011-04-27臧小杰孟德军刘祥鹏
臧小杰,孟德军,刘祥鹏
(中国民航大学 航空自动化学院,天津 300300)
开关磁阻电机考虑互感下仿真模型的建立
臧小杰,孟德军,刘祥鹏
(中国民航大学 航空自动化学院,天津 300300)
目前开关磁阻电机仿真模型的建立很少考虑互感的影响,但实际电机电流换相过程中,相邻相产生的互感最大值可以达到自感的6.4%~7.0%。根据所测得的互感磁链值,在Matlab下建立了考虑互感的开关磁阻电机模型,并对考虑互感和没有考虑互感的仿真结果进行比较,结果可知,考虑互感下电机模型的仿真结果更接近实际情况。
开关磁阻电机;仿真模型;互感
1 引言
开关磁阻电机结构简单、启动转矩大、效率高、容错能力强等,并且可以实现启动/发电功能,因此,它在航天、工业和汽车中的应用具有广泛的前景。
针对开关磁阻电机的设计、参数评估和高特性控制等,都需要绕组磁链的精确值。然而绕组磁链与转子位置和电流密切相关,导致不易获取电机精确的磁链值。很多学者给出了关于磁链的获取方法,文献[1-3]采用了静态特性方法或者有限元模型方法,通过等效空间转子位置和等效空间电流的方法求解开关磁阻电机的数学模型,获取磁链信息,忽略了电机的动态影响和相间互感。文献[4]采用有限元分析的方法,得出两邻相产生的互感值最大可达到自感值的6.4%,非邻相产生的互感值最大可达到自感值的0.07%。在采用瞬时激励两邻相下,必须考虑互感磁链对相磁链的影响。目前的开关磁阻电机控制仿真模型,忽略互感的影响,并不能准确地得出电机各参数的变化波形[5]。
本文以8/6级开关磁阻电机为研究对象,考虑了互感的影响,给出了考虑互感和未考虑互感下的仿真波形。
2 电机绕组连接方式
电机的磁场分布主要与绕组的连接方式、相邻相极性、通电相数及相绕组之间有关。8/6级四相开关磁阻电机,定子磁极排列为NNNNSSSS时,如图1a所示,其中A,B相,B,C相和C,D相为长磁路励磁模式,而D,A为相邻相且磁极极性相反,为短磁路励磁模式,当定子磁极排列方式为NSNSSNSN时,如图1b所示,励磁模式则反之。
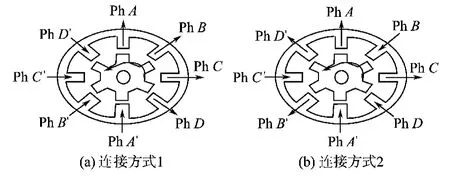
图1 8/6级开关磁阻电机连接方式Fig.1 The connection of 8/6SRM
文献[8]中得出,在某一定电流和转子位置下,D相自感、A相自感、长磁路励磁模式下互感及短磁路励磁模式下互感的比例关系为4.74∶3.14-1.0∶-0.2,长磁路励磁模式下的互感值是自感值的20%以上,可见不可忽略互感。本文绕组连接方式选择图1所示的连接方式1。
3 电机仿真模型
3.1 互感磁链获取与仿真模型实现
文献[1]中的磁链测量方法:激励某一相,其他相保持开通状态,这种离线式测量方法并未考虑其他相对激励相产生互感的影响。电机运转过程中,不仅一相处于开通状态,而且每一开通相都会受其他开通相影响,因此,除了各相的磁链特性外,准确的模型和精确的分析更需要互感磁链的信息。
在一个完整的电角度周期内(对于本文的四相8/6级电角度周期为60°)激励电机的某一相,其他相接通电压为零并处于关闭状态,可在非激励相产生互感电压Vjk(激励j相在k相产生的感应电压),互感磁链的计算公式为

相邻相之间产生的互感影响较非邻相产生的互感明显,可忽略非相邻相之间互感的影响[4,6]。
开关磁阻电机的电磁方程为


则整个电机仿真模型实现如图2所示。

图2 考虑互感的仿真模块Fig.2 The module considering the mutual inductance
在Matlab的电机模型中,未考虑互感的影响,只根据自感产生的磁链值以及转子位置信息,通过查ITBL表(i(Ψ,θ)关系曲线)确定各相电流值,再根据电流值以及转子位置信息,通过查TTBL表(Te(i,θ)关系曲线)确定各相产生的转矩值,最终求取转矩之和进行输出。在考虑了互感的影响下,如图2修正的仿真模型,在某一相通电情况下,其相邻的两相电流分别对通电相产生互感,根据测得的互感磁链值再次查表,确定互感电流以及互感转矩,最终与自感转矩相叠加确定输出总的转矩值。其中互感磁链最大值不超过自感磁链的6.4%,所以由自感磁链和互感磁链分别查表确定各自的互感电流和自感电流时,可以忽略绕组饱和特性。图3给出了A相互感磁链的计算的仿真模块[6]。

图3 A相互感磁链Fig.3 The mutual flux of phase A
图3为A相互感磁链,在A相激励状态下,根据邻相D和B相各自的电流值以及转子位置信息,通过查Table(i(Ψ,θ)关系曲线),获取各自的互感磁链值并叠加得出总的互感磁链值,所得到的总的互感磁链值再次查如图2中TTBL(Te(i,θ)关系曲线)表得到总的互感转矩值。本文在文献[6]中得到的互感磁链曲线簇,是在一套实际测量平台下获取的,由式(1)计算所得磁链值,而且文献中可以得到不同位置和各相相电流下对应的磁链值大小。B,C,D相互感磁链模块与A相类似。
3.2 电机绕组仿真模型实现
电机模型的输入电压与绕组的压降进行积分得到绕组的自感磁链,如图2所示,模型的输入为所测得的定子相电压,输入端应用可控电流源,可控电流源的控制端接的是通过查ITBL表得到的定子绕组的电流。图4给出了A相绕组的仿真实现,其中ia为A相相电流(由ITBL表查得),Va为A相输出相电压,即对应图2中的输入电压[7]。
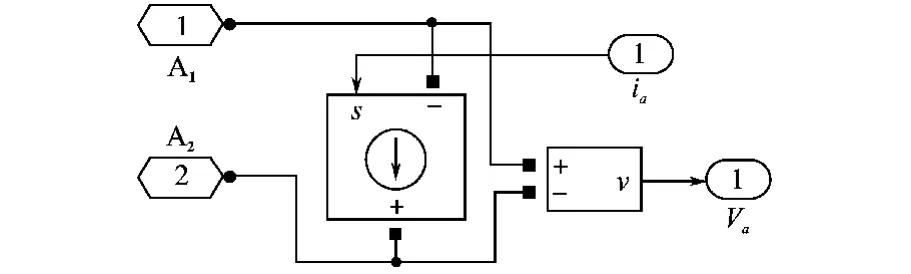
图4 A相绕组实现Fig.4 The winding of phase A
图4为绕组实现,A1,A2可直接与功率变换器相连,实现了Simulink模块与SimPowerSystems模块的连接。B,C,D相绕组模块与A相相同。
4 控制策略的实现

式中:J为转动惯量;B为粘滞系数。
当系统在某一角度处于平衡时,有dω/dt=0。由式(5)可得:Te=Bω+TL,在时间间隔Δt足够小,Bω和TL视为恒定,且
根据开关磁阻电机的机械方程:
5 仿真分析
仿真中,选定电机功率为2.2kW,外加电压DC 220V。基本参数如表1所示。

表1 开关磁阻电机基本参数Tab.1 The basic parameters of SRM
本文采用速度闭环控制,速度调节采用PI控制器,再经滞环控制各相通断。参数设置为:滞环参数为±0.1;PI控制器:P=20,I=0.1。仿真系统如图5所示。
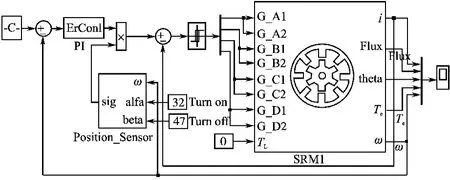
图5 仿真系统模型Fig.5 The simulation model
直接电流滞环控制下,采用的是单相顺次激励,开通角和关断角分别选为32°和47°,未考虑互感和考虑互感下的电流、转矩波形如图6所示。
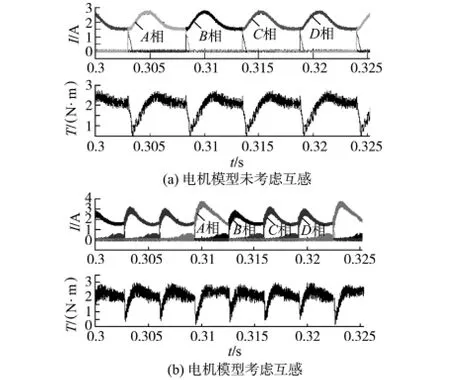
图6 电流滞环控制的仿真波形Fig.6 Simulation waves with current hysteresis control
图6a中为未考虑互感下,在各相换相期间有相对较大的转矩脉动产生,各相之间相互独立,每一相通电时不受其它相的影响,相电流波形之间幅值变化一致。实际电机通电相受其它相的影响,会使得各相电流幅值不同,而且具体每相电流幅值相差多少还与绕组的缠法有关,在本文采用的定子绕组连接方式下,图6b为考虑了互感的影响,在电流换相期间也有相对较大的转矩脉动产生,电流波形更趋近于实际电机电流波形,A相电流峰值最大,其它相电流峰值基本一致,各相生成转矩大小略有不同,因此实际各相绕组利用不等。
6 结论
本文在基于Matlab/Simulink下搭建了考虑互感影响的开关磁阻电机模型,并与未考虑互感下结果进行对比,验证了此模型的有效性。因此,在对开关磁阻电机仿真控制研究时,为使得仿真结果更能反映实际电机参数的变化,可参考本文建立的考虑互感的开关磁阻电机模型。
[1] Miller T J E.Switched Reductance Motors and their Control[M].Oxford,U.K:Clarendon,1993.
[2] Radirnov Nikolay,Ben-Hail Natan,Rabinovici Raul.Inductance Measurements in Switched Reluctance Machines[J].Transactions on Magnetics,2005,41(4),1296-1299.
[3] Zhang Jinhui,Radun Arthur V.A New Method to Measure the Switched Reluctance Motor′s Flux[J].Transactions on Industry Applications,2006,42(6),1171-1176.
[4] Bae Han-Kyung.Control of Switched Reluctance Motors Considering Mutual Inductance[D].Virginia,Virginia Polytechnic Institute and State University,2000.
[5] 吉攀攀,马瑞卿,李星耀,等.多电飞机开关磁阻电机转矩控制系统研究[J].计算机仿真,2009,26(9):285-288.
[6] Debiprasad Panda,Ramanarayanan V.Mutual Coupling and Its Effecton Steady-state Performance and Position Estimation of Even and Odd Number Phase Switched Reluctance Motor Drive[J].Transactions on Magnetics,2007,43(8):3445-3456.
[7] Hoang Le-Huy,Patrice Brunelle.A Versatile Nonlinear Switched Reluctance Motor Model in Simulink Using Realistic and Analyticacl Magnetization Characteristics[J].IEEE Xplore,2005,30(3):568-577.
[8] 曲兵妮,宋建成.开关磁阻电动机互感特性及其对转矩的影响[J].电机与控制学报,2009,13(3):332-336.
修改稿日期:2010-11-02
Simulation Model of Switched Reluctance Motors Considering Mutual Inductance
ZANG Xiao-jie,MENG De-jun,LIU Xiang-peng
(DepartmentofAeronauticalAutomation,CivilAviationUniversityofChina,Tianjin300300,China)
At present,the set up of simulation model of switched reluctance motor,with little regard the impact of mutual inductance,however,in the actual motor current commutation process,the adjacent phases and the mutual inductance can achieve maximum self-inductance of 6.4%~7.0%.According to measured the mutual inductance flux values considering the mutual inductance of SRM,set up the model of simulation,and consider the with mutual inductance and without mutual inductance,the simulation results were compared,results suggest that considering mutual inductance of the motor model simulation results closer to the actual situation.
switched reluctance motor(SRM);simulation model;mutual inductance
TP391.9
A
臧小杰(1957-),男,教授,硕士研究生导师,Email:xjzang@cauc.edu.cn
2010-09-13
