一种实用两相混合式步进电机细分驱动电路
2011-04-27康惠林
康惠林
(中南大学 信息科学与工程学院,湖南 长沙 410083)
一种实用两相混合式步进电机细分驱动电路
康惠林
(中南大学 信息科学与工程学院,湖南 长沙 410083)
阐述细分驱动技术、单极性驱动电路、电流检测技术等内容,给出一种在实际应用系统中稳定、可靠工作的两相混合式步进电动机细分驱动电路。对电路结构、电动机运动与停止状态时电路的工作过程进行了仔细分析,给出了实验测试结果和相关分析。理论和应用结果表明,该电路有利于步进电动机的平稳、快速运动,且减少了对外部电源的干扰。
步进电机;细分驱动电路;续流;续流回路
1 引言
步进电机以其结构简单、可靠性高、不累积误差、无需反馈就可构成开环系统、容易控制等优点,成为数控系统的最佳执行元件之一而得到广泛应用。混合式步进电机的分辨率较高,绕组电感较小,效率高,其细分驱动逐步成为步进电机应用的主流。本文扼要阐述了与细分驱动电路相关的细分驱动技术、单极性驱动电路、电流检测技术等内容之后,给出一种实用的细分驱动电路,对其电路结构和工作过程进行了分析,并给出实验测试结果和实验分析。
2 细分驱动电路要点
2.1 细分驱动技术
细分驱动技术实现方法较简单,对步进电动机运行性能有较大改善,逐步成为步进电机驱动技术的主流。本文涉及的系统也采用细分驱动法。细分驱动的本质,是在细分数和时序状态控制下,跟踪给定电流波形,对电动机相绕组电流进行控制。步进电机根据组合电磁铁理论进行设计,内部磁场非线性特性严重,如何事先确定合适的绕组电流波形,使电机在全频域范围内获得理想的转矩特性并保证步距精度,是细分驱动技术面临的问题和实现关键。现阶段许多研究者针对不同的应用需求,分别采用理论分析、试验测定、拟合算法、神经网络,或者是外加位置闭环校正的办法得到不同的电流给定值[1]。
“正弦阶梯波给定法”以正弦波为参照设定绕组电流的阶梯波给定波形,对绕组电流进行闭环控制,得到均匀的步距角,定位准确,具有合适的输出力矩特性。本文涉及的系统也采用该法。
利用电流跟随PWM技术和电力电子器件可以很容易实现绕组电流波形控制,使其值以一定精度跟随精心给定的参考电流值,从而实现细分驱动,改善电机运行性能。
2.2 单极性驱动电路
依据主电路结构的不同,混合式步进电机驱
两相混合式步进电机要求电机励磁绕组有时通正向电流,有时通反向电流[2]。如果将电机绕组双线并绕,将一相绕组分成二相,其中之一正向通电,另一相则反向通电,就可以达到采用单极性供电对电机进行正、反向励磁的目的。典型的单极性驱动电路如图1所示。
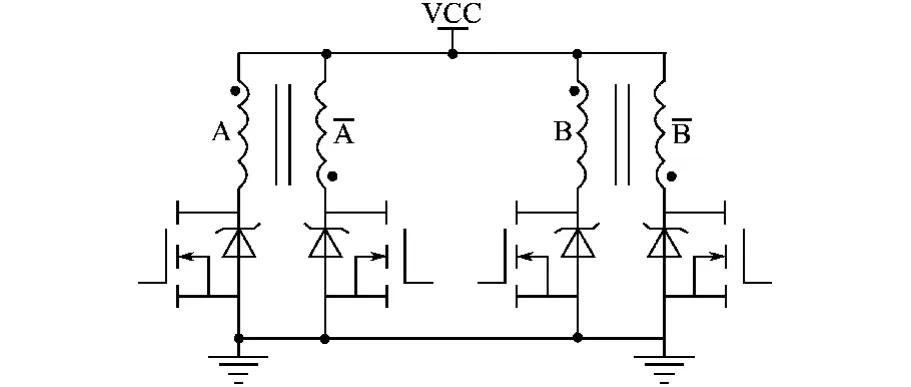
图1 单极性驱动电路Fig.1 The unipolar drive circuit
图1所示的驱动电路只用4个功率开关管,结构简单,电机的绕组在同一时刻只有一半通电,绕组电感小,有利于电机的高速运动,但这也导致其在中低速运行时转矩不如整个绕组同时励磁的运行状态或只能整绕组励磁的电机。根据实际系统的负载转矩特性和运行速度要求,从降低成本的角度出发,本文设计的细分驱动电路采用单极性驱动的方式。
2.3 电流检测技术
实现细分驱动必须灵活地控制绕组电流。实现电流控制的方法很多,且都要求精确、完整地检测电流,将电流值实时、准确地传送到相关环节(如放大环节)进行处理,才能驱动开关功率器件,实现绕组电流的准确控制。
当电机采用单极性驱动电路时,只需在绕组上串接一个电阻,就能检测到完整的电流波形;当电机采用双极性驱动电路时,如果只在绕组上串接一个电阻,检测到的电流波形是离散的,且不能完整地检测到电流。为了得到完整电流,人们或采用HALL电流传感器,或对采样电压进行采样保持,或重新构造电流检测电路。还有人提出“恒频脉宽调制型细分驱动法”解决这个问题[3]。
执行电流采样任务的器件选择要根据实际情况进行。分立器件存在温漂、可靠性差、调节难度大等问题,提高成本去采用精度高、温度稳定性好的集成芯片实现时,可消除这些问题,又提高采样的抗干扰能力[4]。
由于本文采用了单极性驱动电路,采样电流时只在绕组与地端串接一个采样电阻,采用模拟运算放大器按一定规则进行采样,再在软件设计时采用一定的数字滤波方法对A/D采样值进行处理,就可以较低成本完成电流检测的任务。
3 细分驱动电路结构与分析
3.1 细分驱动电路结构
本文设计的驱动电路采用单极性驱动的方式,在绕组与地之间串接了一个电流采样电阻,检测绕组电流,用于控制相绕组电流跟踪给定的正弦电流波形,从而实现电动机的细分驱动。驱动电路的整体如图2所示,采样电路如图3所示。
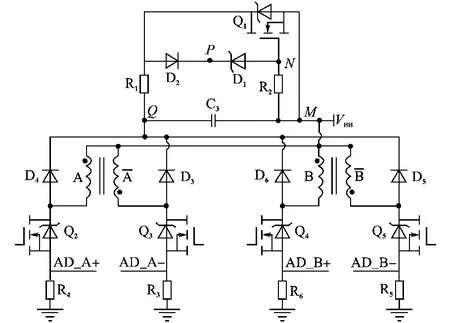
图2 细分驱动电路Fig.2 The micro-stepping drive circuit

图3 采样电路Fig.3 The sampling circuit
图2中,VBB是驱动电路的直流工作电压。绕组A被分为A相和相,绕组B被分为B相和相。C3用于削减绕组电势尖峰,稳定回路电压。D1是瞬态抑制二极管(TVS管),它能大大加快绕组放电速度。D2,D3,D4,D5,D6是二极管,D2起单向导电作用,D3,D4,D5,D6为绕组提供续流通道。Q1,Q2,Q3,Q4,Q5是 N 沟道 MOSFET,Q1为绕组提供续流通道,也为C3提供放电回路,Q2,Q3,Q4,Q5用于控制电机绕组的通电状态。R1可提高绕组放电的速度,限制C3通过Q1放电的速度。R2在有微电流经过时抬升N,M间的电压,使Q1管导通。R3,R4,R5,R6为采样电阻,用于绕组电流的检测。图3为绕组A的电流采样电路,绕组B类似。如果各电阻值满足R4=R1=3R2=3R3,则有:VAD_A=Vr+3(VAD_A--VAD_A+)。电路采用单电源运放,偏置电压使交流信号变为直流信号,对电流信号进行差分放大,绕组在一个PWM周期平均电流就可以被采样到控制器。
3.2 细分驱动电路分析
细分驱动电路没有为每相绕组设置续流回路,而是采用一个由R1,D2,D1,R2构成的续流通道给所有绕组续流。为了通过多绕组的较大电流,将Q1与续流通道并联,且利用R2两端电压驱动Q1,形成大电流续流回路。在各相绕组连接的开关管关断瞬间,绕组产生尖峰脉冲,被C3吸收,绕组电流通过 R1,D2,D1,R2和 R1,Q1构成的2个续流通道而迅速衰减。细分驱动电路既减少了器件的使用数量和PCB面积,又实现绕组快速放电,是一种实用的电路。
驱动电路所在系统中,控制器输出的每一路PWM波经驱动电路整理后形成极性相反的两路PWM驱动信号,用于控制与同一绕组(A或B)连接的2个MOSFET。这使得在每一个PWM周期内,连接绕组的2个MOSFET在同一时刻一个导通,另外一个截止,且都要经历一次导通与截止的状态。为简单起见,下面以电动机的绕组A为研究对象对电路工作过程进行分析,绕组B的工作情况类似。
3.2.1 一个PWM周期内的动作
3.2.2 电机运动与停止时的动作
绕组断电瞬间的感应电动势较大,加载在R1,D2,D1,R2之间时,D1工作在反向微导通状态。这样,就有一个微电流流经R2,使N,M两点的电压抬升到大于Q1的VGS(th)的值域,使得Q1处于饱和导通状态,此时绕组电流可以通过R1,D2,D1,R2和 R1,Q12个续流通道续流而迅速衰减。
对于单相绕组而言,电动势衰减到D1的VRWM值时,只能通过 R1,D2,D1,R2构成的单个续流通道继续续流。但是,由于续流回路可以为多个电机的多个绕组续流,实际上R1,Q1构成的续流通道处于常导通状态,因此在电动机运动时每相绕组均可以经过2个通道续流。
电动机在运动的状态下,电容C3不断被绕组充电,各相绕组对C3进行充电的同时,C3也在通过续流通道放电,两者达到动态平衡时,C3两端电压维持在一个稳定值附近。
当PWM驱动信号不再输出时,各个MOSFET均不开通,各绕组通过续流将磁能释放完毕后不再被充电励磁,电动机停止运动,C3不再被绕组充电而只放电。
C3端电压迅速减小到TVS管的VRWM值时,D1管处于高阻状态,N,M两点电压接近0,Q1完全截止,C3余留的电荷通过由 R1,D2,D1,R2和由R1,Q1构成的通道缓慢地进行泄放。
3.3 实验结果与分析
为了验证上述分析,下面给出实验结果和相关分析。为了分别观察到电机运动和停止时电路的工作情况,本实验的测试程序设定电机的运动规律为:输出PWM波,使电动机运动1.5s而正、反转各一圈,然后停止输出PWM波,使电动机停机1.5s,如此循环,直到断电。
按照该方法驱动电机运动,用示波器获取驱动电路中M,N,P,Q共4个点的电压波形。为方便分析,实验时将N,P,Q点的波形进行了两两测取。测取这4个点的电压时,均以PCB的模拟地端为参考点,结果分别如图4~图6所示。
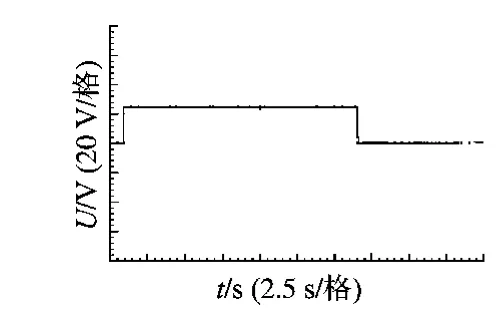
图4 M点波形Fig.4 The waveform of Mpoint

图5 N点和P点波形Fig.5 The waveforms of Nand Ppoint
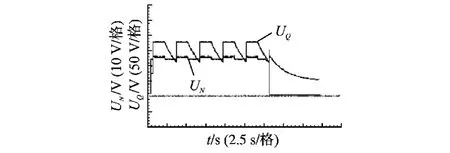
图6 N点和Q点波形Fig.6 The waveforms of Nand Qpoint
图4中,电机的工作电压可以稳定工作在24 V,电压纹波很小,这说明电机绕组对外部直流电源的干扰很少。
图5和图6中,下端曲线为N点电压波形。在电机运动时,N,P,Q点电位分别跃升并维持在28V,128V和132V。1.5s后电机停止运动,N点电位迅速下降,N,M两点电压迅速变为0V(N点电位为24V);P,Q两点电位在PWM波刚停止发出时迅速下降,继而按照一定衰减规律缓慢下降,当衰减时间到1.5s时,两点电位均下降到60 V。此时PWM波恢复输出,电动机重新开始运动,N,P,Q电位分别重新回到并维持在28V,128V和132V。该过程循环往复。当电机工作电压掉电时,绕组不再对C3充电,C3缓慢进行放电。
图5和图6说明,电动机在运动时TVS管反向微导通,N,M两点形成电压差,将Q1导通,形成两路续流通道,也为C3提供放电通道。这样C3充、放电同时进行,达到动态平衡,维持一个较大的端电压。而当电动机停止运动或者掉电时,绕组不再对C3充电,C3迅速放电到D1的VRWM时D1变为高阻元件,C3只有通过由R1,D2,D1,R2和由R1,Q1构成的通道放电,而且放电电路时间常数很大。
3.4 关键器件的选择
驱动电路关键器件必须仔细选择,各个器件参数确定的原则是:
1)C3的耐压值要根据电动机绕组感应电动势值并按一定倍数的裕量进行给定,电容值要考虑放电时间的大小进行确定;
2)D1管的VRWM值应该根据电动机绕组感应电动势值进行确定,要特别注意其工作特性曲线;
3)R1电阻值的确定既要考虑提高绕组放电速度,又要考虑C3端电压和Q1的IDS值;
4)R2电阻值的选择既要根据D1管的工作特性曲线确定D1在C3端电压作用下的反向导通微电流大小,又要注意Q1较好导通时的VGS值;
5)Q1的VGS要根据电动机绕组感应电动势值并按一定倍数的裕量进行选择。
在测试该驱动电路时,使用了型号为103H549-0440的三洋两相混合式步进电动机,该电机额定相电流为1.2A,相电阻为3.3Ω,相电感为3.8mH。其他关键器件的类别及关键参数的选定情况如表1所示。
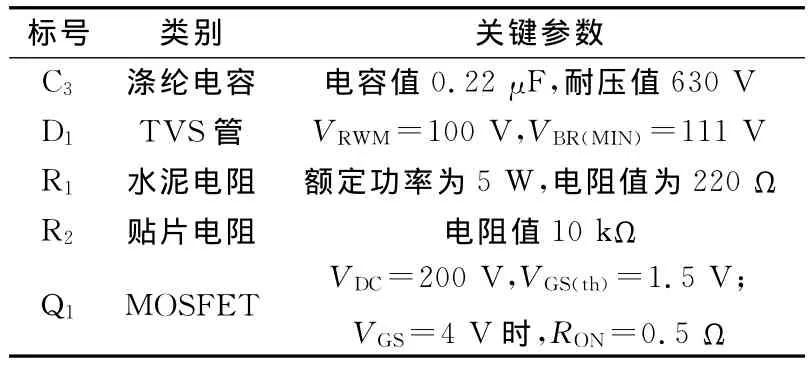
表1 关键器件参数选择表Tab.1 The parameter list of key devices_____
3.5 细分驱动电路的特点
细分驱动电路在绕组与工作电源之间增加了续流回路,隔绝了绕组反电动势与电源之间的直接联系。细分驱动电路具有以下特点:
1)续流回路为绕组电流提供泄放渠道,减少电机的热耗散,在确保电机正常运行的同时,减小电动机本体的温升;
2)只用续流回路并联一个MOSFET就可以实现多电机多绕组的快速续流,精简电路版体积,降低成本;
3)续流回路包含TVS管,大大加快了绕组释放磁能的动作,有利于提高电动机的升速性能和高速运动的品质;
4)快速续流回路可实现各相绕组电流的线性调节,通过改变同一绕组的两相线圈的励磁时间,同时注意2个绕组电流的相序,就可以在细分驱动过程中方便地调节电机转矩;
5)绕组感应电动势通过续流电路衰减而没有加载在开关电源上,减少了对工作电压的干扰,有利于电源的稳定工作。
4 结论
细分驱动电路采用单极性驱动的结构,可以通过实时采样绕组电流,按照一定控制策略,利用PWM技术控制MOSFET管的通断,使电机相电流跟踪给定的正弦电流波形,从而实现细分驱动。电路在电机各绕组与工作电源之间增加了一个续流回路,从而隔绝绕组反电动势与电源的直接联系,有效提高步进电动机在高速运动时的运行性能。本细分驱动电路在实际应用系统中工作稳定、可靠,电动机在中低速运动时运行更加平稳且噪声低,高速运动时温升降低,升速性能得到提高。
[1] 史敬灼.步进电动机伺服控制技术[M].北京:科学出版社,2006.
[2] 刘宝廷,程树康.步进电动机及其驱动控制系统[M].哈尔滨:哈尔滨工业大学出版社,1997.
[3] 王丽.二相混合式步进电动机微步驱动技术的研究[D].西安:西安理工大学,2005.
[4] 李峰,吴一辉,武俊峰,等.直流无刷电机高精度电流采样系统设计[J].电力电子技术,2010,44(5):41-43.
修改稿日期:2010-11-20
Practical Micro-stepping Drive Circuit for Two Phase Hybrid Step Motor
KANG Hui-lin
(SchoolofInformationScienceandEngineering,CentralSouthUniversity,Changsha410083,Hunan,China)
Micro-stepping drive technique,unipolar drive circuit and current sensing technique were briefly interpreted.A micro-stepping drive circuit for two phase hybrid step motor,which works with favorable stability and reliability in practical application system,was presented.The structure of the circuit and the work process of the rotating and stationary mode of motor were carefully analyzed,experimental results and related analysis were presented.The theoretical and applied results prove that this circuit does good for the stable and fast rotation of the step motor and reduces the interference to the external power supply.
step motor;micro-stepping drive circuit;freewheeling;freewheeling loop
TM383
A
康惠林(1986-),男,在读硕士研究生,Email:kahwellean@gmail.com动技术可以分为单极性驱动、双极性驱动、全H桥和多相桥驱动等。
2010-07-26
