深空再入返回飞行仿真及工程应用分析
2011-04-17王跃峰
赵 晟,王跃峰
(1.国防科技大学,湖南长沙 410073;2.中国空间技术研究院,北京 100094)
深空探测返回是空间探索的一个重要发展方向,深空取样返回是进行深空探索,对外星球生命、物质进行研究的重要手段.中国已提出月球取样返回计划,随着火星、金星等更远星体探测任务的执行,外星体采样返回将成为必然的发展趋势[1].深空探测返回具有以下特点:再入速度高、不同任务的航程需求变化大、再入点散布大.
返回技术是集航天动力学、空气动力学、防热结构学、控制学及导航学、火箭发动机技术、测控技术、回收和着陆技术等学科的一门综合性学科[2].国内目前掌握的返回技术为弹道式返回和标准轨道半升力返回.弹道式返回在返回过程中不产生升力或者产生较小的升力,但不对升力进行控制的返回方式.标准轨道返回的返回器通过质心偏置获得升力,其标准轨道在地面发射前已经注入,在再入大气过程中进行摄动制导,保证着陆精度.此外,国外深空返回中也有半升力预测制导返回,它采用与标准轨道制导同样的升力获取方式,在返回过程中实时规划飞行航迹,从而提高高速、长航程再入飞行的着陆精度.
从国外的深空探测返回经验看,均采用简单可靠的弹道式返回方式或有较高着陆精度的预测制导返回:美国的深空取样返回器“星尘号”和“起源号”均采用弹道式再入;美国早期的探月飞行器“阿波罗系列”和苏联的探月飞行器“探测器6号”均采用预测制导返回[1].
本文首先建立球冠倒锥外形飞行器在大气层内飞行的动力学模型,然后对弹道式返回和预测制导返回两种返回方式进行飞行仿真,最后从返回飞行性能及其工程应用技术要求两个方面出发进行工程应用分析.为深空再入返回飞行的返回方案选择提供指导.
1 大气层内再入飞行动力学建模

图1 球冠倒锥飞行器
弹道式返回在再入过程中进行自旋控制,保证以零升力返回;半升力返回通过调整倾侧角,改变升力在纵、横平面的分量达到控制飞行航迹的效果.
根据飞行器的外形及其在再入过程的飞行情况建立动力学模型,存在以下假设条件:
1)飞行器始终以配平攻角飞行;
2)不考虑地球扁率;
3)地球万有引力满足反平方关系.
根据动力学理论,飞行器在大气层再入飞行的动力学模型为[3]

式中:ψ为方向角,指当时飞行速度矢量与当地正东方向的夹角;γ为飞行航迹倾角,指当时飞行速度矢量与当地水平线的夹角;φ为滚转角,由制导律确定;ω为地球自转角速度,ω=7.2722×10-5rad/s;L为气动升力为气动阻力,D=6378.14km .
CM教科书有理数内容中涉及学科相关联背景素材的例题有5.08%,而RJ版教科书例题中未涉及与其它学科相关的背景素材,表明CM教科书更加注重引入与其它学科相关联的背景知识,如数学在物理、化学和生物乃至体育等学科的应用,促使学生意识到数学的广泛用途.
2 弹道式和半升力预测制导返回飞行仿真
本文对高速再入问题分别采用弹道式返回和预测制导返回两种返回方式的飞行过程进行仿真分析,飞行器以美国猎户座外形为基础.采用弹道式返回时,假设质心在纵向对称轴上,飞行过程升力系数为零.表1给出了猎户座的外形尺寸和飞行器质量[4].
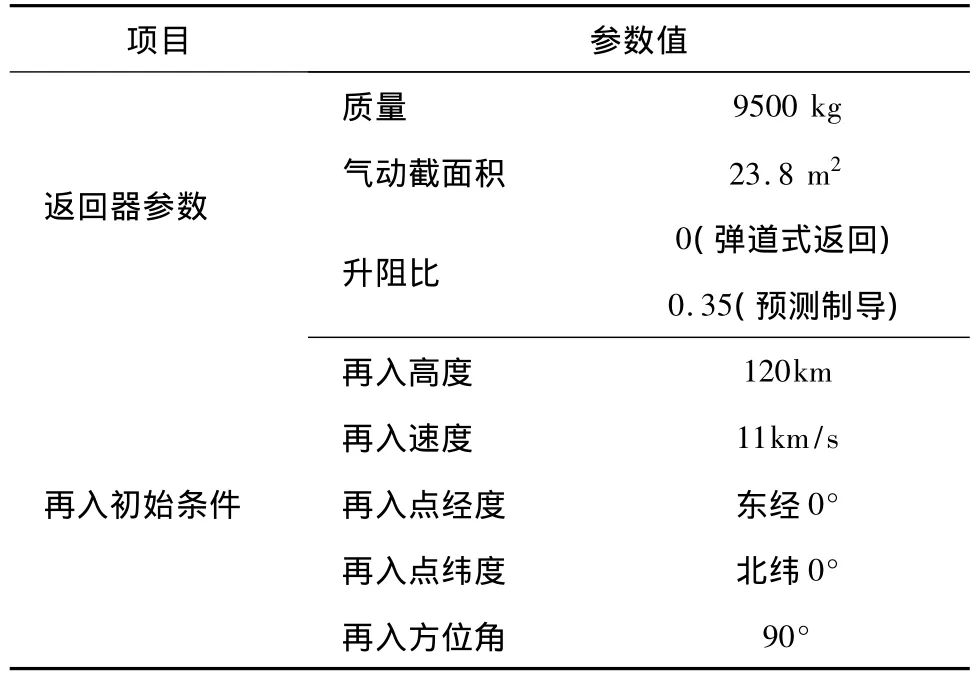
表1 航天器参数
2.1 弹道式返回仿真
根据弹道式返回飞行航程相对于再入角的灵敏度,以及实际再入姿态精度控制能力,选择对-8°再入飞行过程仿真,以分析气动过载和热流密度等性能参数特点.
弹道式返回飞行持续200s左右,飞行航程为900km;从仿真曲线a)可以看出,弹道式返回由于再入角大(绝对值),而且飞行过程没有升力作用,所以飞行航迹较短,最终直接再入大气;从速度变化曲线b)中可以看出,再入飞行过程随着飞行高度下降,飞行密度增加,速度变化率进一步增大,从而导致较大的气动过载和热流密度峰值.曲线c)和d)分别为该返回过程对应的气动过载荷热流密度随时间的变化曲线.从图中可知,本文仿真的返回器以-8°弹道式再入时,峰值气动过载可达25g,驻点热流密度峰值达3.4×106W/m2.

图2 弹道式返回仿真曲线
2.2 半升力预测制导返回仿真
预测制导返回在返回过程中需根据实际飞行情况、落点要求持续实时进行倾侧角制导计算,本文采用数值预测制导算法进行制导计算.
半升力预测制导能够实时进行制导计算,再入角变化率小,适合采用较浅再入,本文选择-6°再入,4000km目标航程问题进行仿真研究[5-7].
从仿真曲线a)可以看出,航天器再入下降至一定高度(约60km)时,在升力控制下跳跃飞行来保证飞行航程需要,对应于仿真曲线b),在跳跃飞行段气动力较小,飞行器的速度变化率比较平缓,即实现平缓减速,避免了较大的气动过载.
仿真曲线b)~d)为对应的航程、气动过载和热流密度的变化曲线.从图中可以看出,通过航迹规划,航天器的飞行航程达到约3960km,与目标航程相差40km,是因为考虑到开伞减速,仿真计算终止于10km.
与弹道式返回相比,该种长距离再入飞行任务,采用预测制导返回具有较高的精度.从飞行过程的气动过载和热流密度可以看出,通过航迹规划,气动峰值分散在前后两部分,最大气动过载仅为4.2g左右;热流密度峰值出现在第一次下降飞行段,最大峰值为2×106W/m2.

3 弹道式和半升力预测制导返回工程应用分析
通过上述对弹道式返回和预测制导返回的仿真分析比较,结合工程实际,可进行深空弹道式返回和预测制导返回的对比.
3.1 弹道式返回飞行优点及缺点分析:
弹道式返回在工程实际应用中具有以下优点:
1)弹道式返回采用旋成体,外形设计简单;
2)弹道式返回飞行过程中,始终以恒定的角速度自旋,返回器外部受热均匀,热防护设计简单;
3)弹道式返回过程不需要制导,所以返回器质量较轻,在满足再入条件之后,飞行安全性高;
4)技术成熟度水平高,工程应用实现的成本低.
弹道式返回在任务适应性方面存在一些不足,可以归纳为以下几点:
1)弹道式返回航程不可调,飞行航迹相对再入角非常敏感,所以要想获得较小的落点散布需要再入点飞行状态误差很小,并且为减小再入飞行过程中气动不确定性和风等影响,需选择较大的再入角,来保证飞行任务成功;
2)弹道式返回的再入角大,而且再入飞行过程中没有升力可利用,所以飞行航迹较陡,在飞行过程中会产生较大的气动过载和热流密度,这对防热材料要求提高.并且该种气动过载环境不适用于载人返回等低过载深空返回任务.
3.2 半升力预测制导返回飞行优点及缺点分析:
半升力预测制导返回作为一种新的返回方式,有许多新的优点:
1)预测制导返回可以在轨规划航迹,所以具有较大的任务适应性;
2)返回飞行过程,利用升力可以调整航迹,拓宽再入走廊,从而降低对再入点精度的控制要求;
3)可以在较浅的再入条件下,进行精确制导返回,从而大大降低气动过载,有利于深空载人等任务的展开.同时,峰值热力密度较小,对防热材料选用要求低;
4)通过跳跃飞行,可以有效增加飞行航程,有利于更广泛的选择落区.
半升力预测制导返回在进行工程应用时相比与弹道式返回有一些缺点:
1)预测制导返回的制导方案设计复杂,在工程实际应用中,需要与控制系统相结合,增加了返回器设计的难度;
2)返回飞行持续时间长,加热总量大,所以需要增加防热材料的使用,可能增加了返回器的质量.
4 结论
从以上分析可知,深空弹道式返回可以简化设计,缩短研制周期,降低成本,适合于进行深空返回技术的前期验证和无人深空探测任务的完成;半升力预测制导返回是有效解决深空高速再入返回问题的途径,对于载人或者其携带有对再入飞行过载有较高要求的有效载荷时,适宜采用半升力预测制导返回实现.
[1] 韩鸿硕,陈杰.21世纪国外深空探测发展计划及进展[J].航天器工程,2008,17(3):2-22
[2] 王希季.航天器进入与返回技术[M].北京:中国宇航出版社,1991
[3] Frank J R.Re-entry vehicle dynamics[M].New York:America Institute of Aeronautics and Astronatics Inc.,1984
[4] Bairstow S H,Barton G H.Orion reentry guidance with extended range capability using PredGuid[C].AIAA Guidance,Navigation and Control Conference and Exhibit,Hilton Head,South Carolina,August 20-23,2007
[5] Graves C A,Harpold J C.Apollo experience report mission planning for Apollo entry[R].NASA TN D-6725,19720013191,1972
[6] 陆平,朱亮,敬忠良,等.探月返回跳跃式再入制导[C].全国第十三届空间及运动体控制技术学术会议,宜昌,2008
[7] Chapman D R.An approximate analytical method for studying entry into planetary atmospheres[D].Ames Aeronautical Laboratory Moffett Field,Calif.,1958