一种基于CAHVOR模型的导航相机标定方法
2011-04-17刘淑娟陈建新李春艳
刘淑娟,陈建新,王 立,李春艳
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术重点实验室,北京 100190)
在月球车的各项关键技术研究中,立体视觉系统占据了重要的位置,它的主要功能是对月球表面复杂环境进行有效的感知和信息融合,对视觉系统的精确标定是立体视觉算法的基础,也是月球车实现障碍检测和路径规划的前提[1].
相机标定工作所要解决的问题是标定物体的三维空间坐标和二维图像的对应关系.标定过程中通常要利用数学方法对从数字图像中获得的数据进行处理,得到相机的内、外参数.现在普遍使用的标定方法有:直接线性变换法(DLT)[2]、TSAI两步标定法[3]和多用于摄影测量方面的基于共线条件的标定方法[4],以上这些标定方法均是从标量方程求解的角度标定相机内外参数.本文介绍CAHVOR标定方法,它是从矢量的角度标定相机,标定方法简单,参数求解快速且精确度能达到导航相机标定要求.
1 基于CAHVOR模型标定方法
CAHVOR模型描述的是物体坐标系到图像坐标系之间的转化关系,其中每个字母都代表模型的一个矢量:实际的成像原理图如图1所示.

图1 CAHVOR原理图
先介绍图中涉及到的4个坐标系,世界坐标系(Ow-XwYwZw),一经选择就确定的坐标系;相机坐标系(Oc-XcYcZc),以相机的聚焦中心为原点Oc(光学中心),以相机光轴为Zc轴建立的坐标系;成像平面坐标系(O-xy),以透镜光轴和成像平面的交点为原点,x轴和y轴分别平行于相机坐标系的x轴和y轴,有效焦距f就是光学中心到成像平面的距离;图像像素坐标系(O-ij),分别表示是该像素在数组中的列数和行数.
如图1,在 CAHVOR 模型[6]中单位矢量 H',V'定义在沿图像x和-y方向,图像的光学中心在(hc,vc),对每个矢量定义如下:
C:相机中心矢量,表示从地面坐标系到相机透视中心的矢量;
A:垂直于图像平面方向单位矢量,且其与H',V'正交;
H:描述水平信息,H=hsH'+hcA;
V:描述垂直信息,V=vsV'+vcA;
O:光轴单位矢量,当有透镜畸变时,图像平面与光轴不垂直,这时用矢量O来描述光轴方向,当垂直时A与O重合;
R:在物体空间坐标系下描述径向畸变系数.
一般来说相机镜头是非理想光学系统,存在加工误差和装配误差,物点在相机像面上实际所成的像与理想成像之间存在光学畸变误差.主要的畸变类型有3种[2]:径向畸变、偏心畸变和薄透镜畸变.在这几种畸变中,径向畸变是畸变的主要分量[6],所以这里主要考虑径向畸变带来的影响.
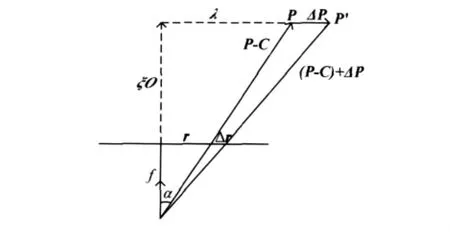
图2 CAHVOR中畸变示意图
考虑畸变,加入矢量O,R后,原投影模型的改变如图2所示,原空间点由P移动到P',对于成像模型的影响分析如下:
(P-C)沿光轴的分量是ε=(P-C)·O,则从光轴指向该点矢量表示为λ=(P-C)-εO,引入参数,比例系数相应为μ=ρ0+ρ1τ+ ρ2τ2,这样径向畸变可以描述为 ΔP=μλ,这样在考虑畸变时的实际空间坐标系下点坐标为

则相应的CAHVOR模型变为[3]

在上述CAHVOR模型中,每个字母代表一个矢量或是镜头畸变的3个系数组,总共有18个参数,但由于A,O是单位矢量,所以实际只需求解16个参数.
2 CAHVOR模型参数的确定
CAHVOR模型参数的确定是通过求解成像方程,利用严格最小二乘法来计算参数[7].最小二乘法是将测量点和估计点之间差值的平方作为平差对象.
2.1 初值选取
将图像平面上靠近相机光轴的点记录为Pa,参数初值的具体选取如下:
C0由相机的空间位置决定;
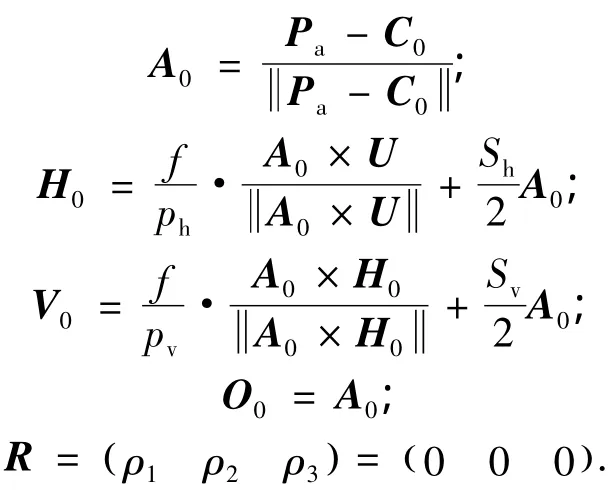
其中,U是沿图像平面垂直向上的矢量,Sh,Sv表示图像平面的列数和行数,在像平面上x轴沿水平向右的方向,y轴沿竖直向下的方向.
初值权矩阵如下:

其中,

其中,σd表示向量 A 和 O 的协方差,σ1,σ2,σ3表示畸变的初始值权系数,可以通过改变对角线上的值大小来实现初始值权值的变化.
2.2 算法说明
求解参数的循环过程可分为以下几步[3]:
1)按要求给定要估计的参数初值,即设定C,A,H,V,O,R 的初值 C0,A0,H0,V0,O0,R0作为循环的初始值.
2)由于A,O是单位阵,为了精确结果考虑约束矩阵K,对于A和O的约束条件将其对参数估计值g=(C A H V O R)求偏导,得到2×18的矩阵K为


4)估计值和测量值之间的差值

由式(3)~(5)计算系数矩阵N和等式中的常数矩阵t,得到步长q,即估计值逼近真值的距离:

在N,t中第一项的加入在数值上对最后的结果是没有影响的,只是避免矩阵接近奇异.
5)由于带有约束值,所以单独计算约束项代入最后的结果中:

6)将D加在原来的估计值上得到新的估计值g=g0+D.
当D小于条件值时,即估计值于真值的距离可以忽略不计的时候,循环结束,此时得到的估计值就是要求的参数值.
3 实验与结果分析
3.1 仿真结果
通过选取两个不在同一平面的空间标定板面来获得空间点的三维数据,试选取987个空间点在空间坐标系下的三维坐标,通过如图的相机坐标系和空间坐标系的关系,由CAHVOR投影模型可以得到每个空间点对应的图像点坐标.

图3 空间坐标关系
利用这两组数据,由第2节中介绍的最小二乘法算法过程求解模型获得估计的参数,比较参数真值和估计结果.

表1 参数C真值与估计值比较

表2 参数A真值与估计值比较

表3 参数H真值与估计值比较

表4 参数V真值与估计值比较

表5 参数O真值与估计值比较

表6 参数R真值与估计值比较
从以上这6个相机参数之间的比较结果可以看出,估计的参数结果和真值之间的差距很小,C,A,H,V这4个参数几乎能达到0.01%的精度,而畸变项O,R中占主导地位的系数值的精度也很高.
为了更好地看出算法的精确度,本文还将估计参数值和空间点坐标代入公式(5)来反求解出像点,比较估计结果图像点和实际图像点数值之间的差值,得到的差值均在10-3(pixel)左右,平均值为(0.7199,0.7220)×10-3(pixel),这个差值是很小的,由此可见对于畸变的估计是可以接受的,综合以上结果可以得到结论:
(1)严格最小二乘计算结果和真值之间的偏差很小,基本上可以得到精确的参数值,对于畸变参数的求解基本上和实际值差异不大,可以满足要求.
(2)用估计的参数值计算的图像点和实际图像点差值的平均值能达到10-3(pixel)的精确范围.
3.2 实验数据
在实验中,用相机对空间中的靶标拍照,进而得到相应的空间点及其提取后的位置,这是进行标定的数据来源,本文对这两组数据,分别用CAHVOR标定方法和常用的共线标定方法来估计参数比较两个算法.
(1)摄影测量标定方法[8]
在小孔成像模型的基础上考虑了镜头径向畸变的影响,通过对空间点和图像点处理,利用平差算法求解方程得出相机内外参数[9].

表7 相机内、外参数标定结果
其中(X,Y,Z)是相机坐标系到空间坐标系的平移向量,角(ω,ψ,κ)是相机坐标系到空间坐标系的旋转角,(xp,yp)是相机光心主点坐标,(K1,K2,K3)是径向畸变系数.
将标定参数和空间点数据代入成像模型中,反算图像点和实际图像点比较,得到差值分布图如图4所示.

图4 共线方程方法图像点差值比较
反算图像点到实际图像点的差值矢量图(差值×200)见图5所示.
由于摄影测量方法在参数求解的过程中主要运用了参数平差的求解方法,它不仅对内外参数平差,同时还考虑对空间点和图像点数据进行平差,即认为给定的这些数据也都是不准确的需要修正,这就大大增加了算法的复杂性和运算时间.
(2)采用CAHVOR求解结果
对空间点和图像点的数据利用第2节中介绍的算法,估计CAHVOR的参数值见表8.
用估计参数反算图像点和实际图像点比较,得到差值分布图,见图6.

图5 共线方程方法图像点差值矢量分布图
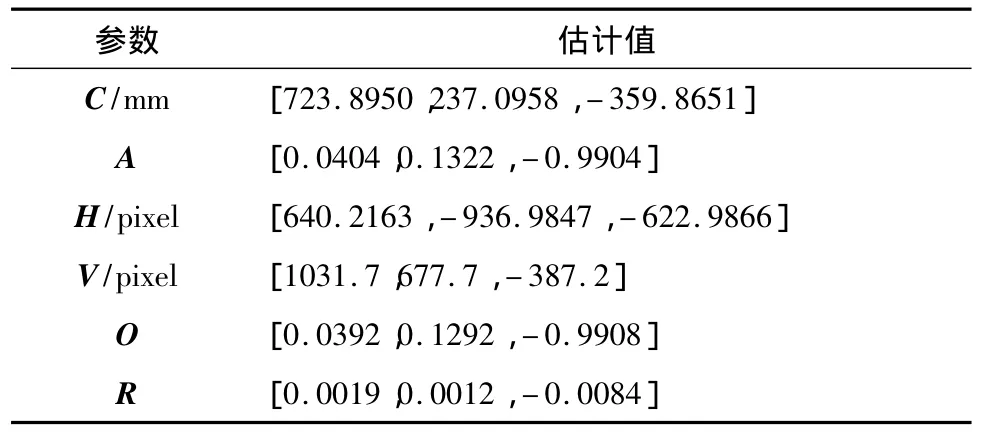
表8 CAHVOR估计参数

图6 CAHVOR标定参数图像点差值比较
反算图像点到实际图像点的差值矢量图(差值×200)见图7.
实验数据处理后的估计参数结果经过比较,可以得出以下结论:
1)由图4和图6可以看出,共线方程方法在x方向的精度90%处在0~0.11pixel,y方向大概有90%处在0~0.1pixel间,而CAHVOR标定方法,图像点差值在x方向的90%分布在0~0.1pixel这个一个小范围内,y方向90%分布在0~0.092pixel之间.
2)可以看到用共线方程方法最终的图像点差值平均值为[0.0514,0.0404],而 CAHVOR 方法图像点差值平均值为[0.0455,0.0383],前者的最大值达到[- 0.1215,0.1494],后者为[0.1933,0.1479],两者相比较可以看出CAHVOR标定方法对于导航相机参数精度标定能力可以和共线方程方法媲美,可以达到导航相机要求的标定精度.

图7 CAHVOR标定图像点差值矢量分布
3)在算法标定速度方面,共线方程方法利用了参数平差方法估计最终的数值,它认为给定的空间点和图像点的数据都包含误差,所以程序复杂、运算速度较慢,而CAHVOR的算法利用带约束的最小二乘算法估计参数,简单易行,速度快,并且同时满足月球车导航相机的标定精度的要求.
4 结论
本文介绍了一种从矢量角度标定相机的CAHVOR方法,该方法更为直观地体现了相机成像原理,对于相机畸变考虑更形象、具体,经过理论数据验证,该标定模型的精度能达到10-3像素,说明能很好地估计参数值,为了进一步运用在实际中,通过实际的空间取点来计算参数并与摄影测量方法的结果进行比较,结果显示利用CAHVOR模型估计的参数投影的图像点和基于共线方程的摄影测量方法投影的图像点精确度相当,可以满足导航相机的标定精度要求.CAHVOR标定方法主要是利用最小二乘方法对成像模型求解16个参数,基于共线方程的摄影测量方法认为给予的空间点和图像点数据也非真值,它不仅对内外参数平差,还同时要考虑对空间点和图像点数据进行平差,这将大大增加了算法的复杂性和运算时间.
[1] 支敏慧.月球探测车双目立体视觉系统研究[D].哈尔滨工程大学,2007
[2] 张广军.机器视觉[M].北京:科学出版社,2005
[3] 王保丰.航天器交会对接和月球车导航中视觉测量关键技术研究与应用[D].信息工程大学,2007
[4] 林君建,苍桂华.摄影测量学[M].北京:国防工业出版社,2006
[5] Yakimovsky Y,Cunninghaml R.A system for extracting three-dimensional measurements from a stereo pair of TV camera[J].Computer Graphics and Image Processing,1978,7:195-210
[6] Gennery D B,Todd L,Brian W.Sensing and perception research for space telerobotics at JPL[C].IEEE Int.Conf.on Robotics and Automation,Raleigh,NC,1987
[7] Mikhail E M.Observations and least squares[M].Harper and Row,1976
[8] Donald B G.Camera calibration including lens distortion[R].JPL Internal Report D-8580,1991
[9] 黄桂平.数字近景工业摄影测量关键技术研究与应用[D].天津大学,2005
