基于Simulink车辆舒适性和行驶安全性仿真分析
2011-04-11陈俊杰张新刚毛亚峰李兆凯
陈俊杰,张新刚,毛亚峰,李兆凯
(长安大学测试分析中心,西安710061)
0 引言
车辆在设计过程中,悬架参数的选取对车辆行驶平顺性和安全性的影响至关重要。适当的降低悬架弹簧刚度,使车轮受到路面激励时,悬架弹簧具有足够大的挠度来储存垂直振动能量,可以提高车辆行驶的舒适性。同时,如果悬架刚度降低的不合适,也会使得车轮对路面的动载波动性变大。车轮动载的波动对车辆行驶安全性的影响表现在两个方面:纵向方向上,其对车辆制动性能影响较小;侧向方向上,对车辆操纵稳定性影响很大,严重的时候会使车辆在行驶过程中出现过多转向,使车辆处于不稳定状态。由于车身加速度和车轮动载分别是评价车辆平顺性和安全性的重要指标,本文利用拉格朗日法建立了1/2车辆几何模型,并在此基础上对其进行了Simulink的动力学仿真,最后分析了仿真车型在不同等级路面、不同车速下的车身加速度均方根值和后轮动载均方根值,这对满足汽车舒适性和行驶安全性的情况下优化悬架参数具有重要意义。
1 路面不平度的时间域模拟方法
路面对车辆的激励按照不平度类型分为随机激励和离散时间激励,离散时间激励主要通过路面几何特性,构造其关于时间确定性函数;随机激励通过白噪声激励法、离散随机激励法、随机正弦波叠加法重构。其中随机正弦波叠加法是采用离散谱来逼近随机过程的信号,重构公式为:
式中:Gq(fi)为小区间的路面不平度;△f为小区间的时间频率带宽;fi为每个小区间的中心频率;β为[0,2π]上服从均匀分布的随机数。
根据公式(1),利用Matlab编制了车辆在A级路面和B级路面车速为60 km/h的时域路面谱程序,如图1所示。
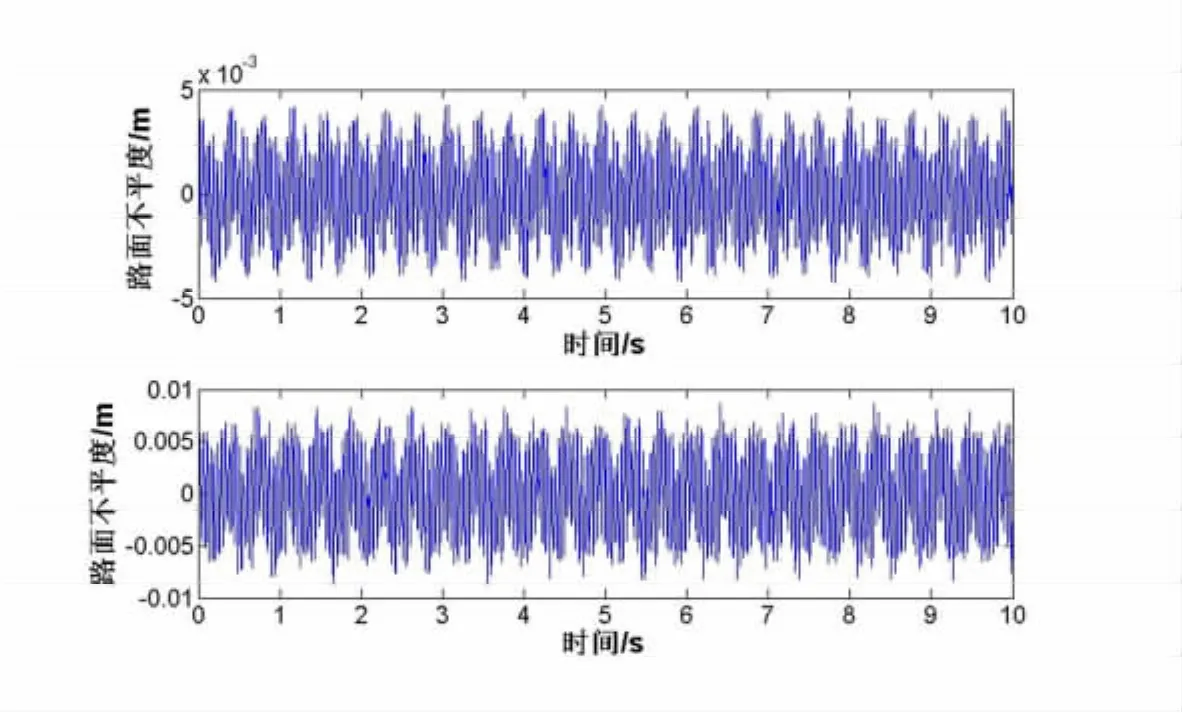
图1 车速为60Km/h时A级路面(上)和B级路面(下)上的路面谱
2 1/2车辆几何模型
为了方便计算,车身垂直位移坐标z0、前轮位移坐标z1、后轮位移坐标z2、前轮接触的路面位移激励坐标q1和后轮接触的路面位移激励坐标q2的坐标原点都选在各自的平衡位置,如图2所示。
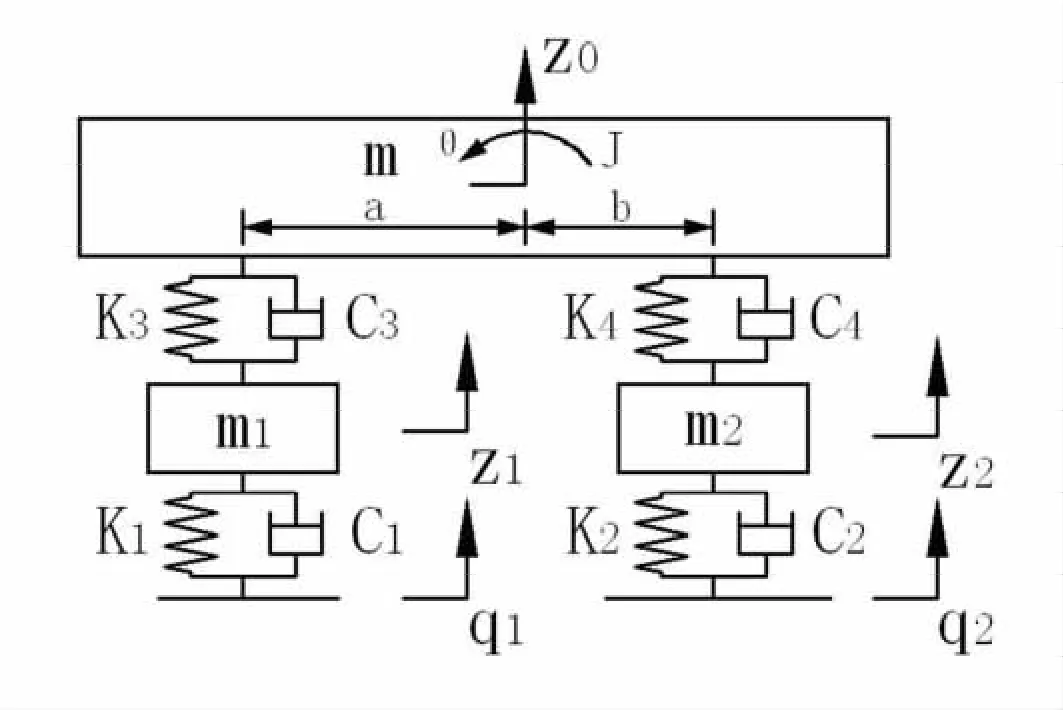
为了研究车身—车轮三质量系统在垂直和俯仰两自由度上的动力响应特性,对车辆结构作出简化。
(1)车身左右对称,把整个车身简化为一个刚体,前、后桥分别简化为两个集中质量。
(2)车辆前、后轮受到的路面激励不一样,但左、右轮定义为一样。
拉格朗日法是从能量的观点建立系统的动能T、势能E、耗散能D和功W之间的标量关系,是研究静、动力学问题的一种方法。对于保守系统和具有瑞利散逸函数的非保守系统,拉格朗日方程都有统一的标准形式。

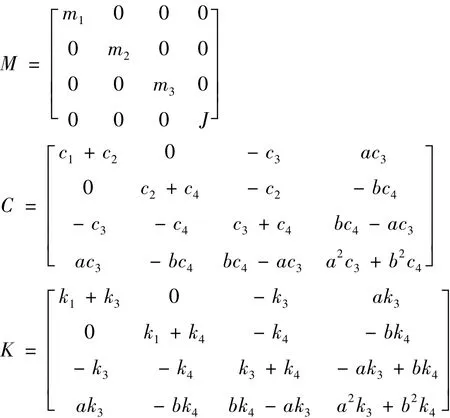
将系统的动能T、势能 E、耗散能D代入式(2),求得方程的矩阵形式为:

其中式(3)中质量矩阵M、阻尼矩阵C、刚度矩阵K、响应矩阵Z、激励矩阵Q分别为下面所示:
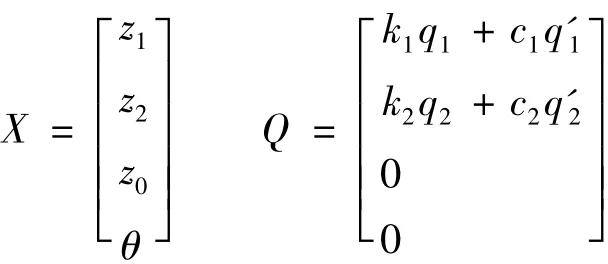
前、后轮的动载分别为:

现以某国产车为研究对象,其前、后桥到质心的距离a、b分别为1.32m、1.6m,其它结构参数见表1。
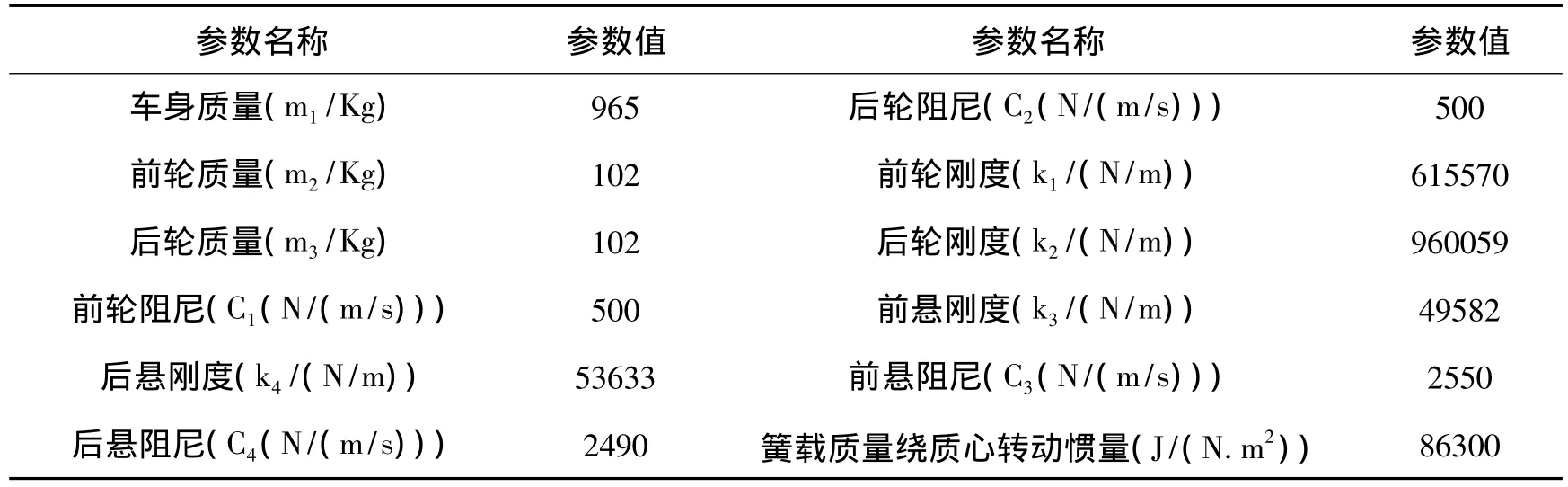
表1 车辆结构参数
3 基于Simulink的车身加速度响应谱和后轮动载分析
3.1 Simulink车身加速度谱和动载谱仿真
根据式(3)描述的1/2车辆几何模型进行Simulink仿真,仿真过程由输入源模块、数学运算模块、接收模块构成。输入源模块作为系统的激励;数学运算模块是实现系统状态空间方程求解的核心;接收模块主要用来输出结果。
本文仿真过程如下:①将MatLab程序生成的路面谱数据导入到输入源模块作为系统的激励;②将激励导入数学运算模块,根据式(3)及车辆具体结构参数进行Sum(求和)、Gain(增益)、Integrator(积分)等一系列运算,得到车身加速度谱和后轮动载谱;③接收模块利用To workspace子模块将车身加速度、后轮动载作为变量导入到工作空间。
图3给出了仿真车辆在60km/h时候分别在A级和B级公路路面的车身加速度响应谱。图4给出了部分四自由度Simulink子程序。
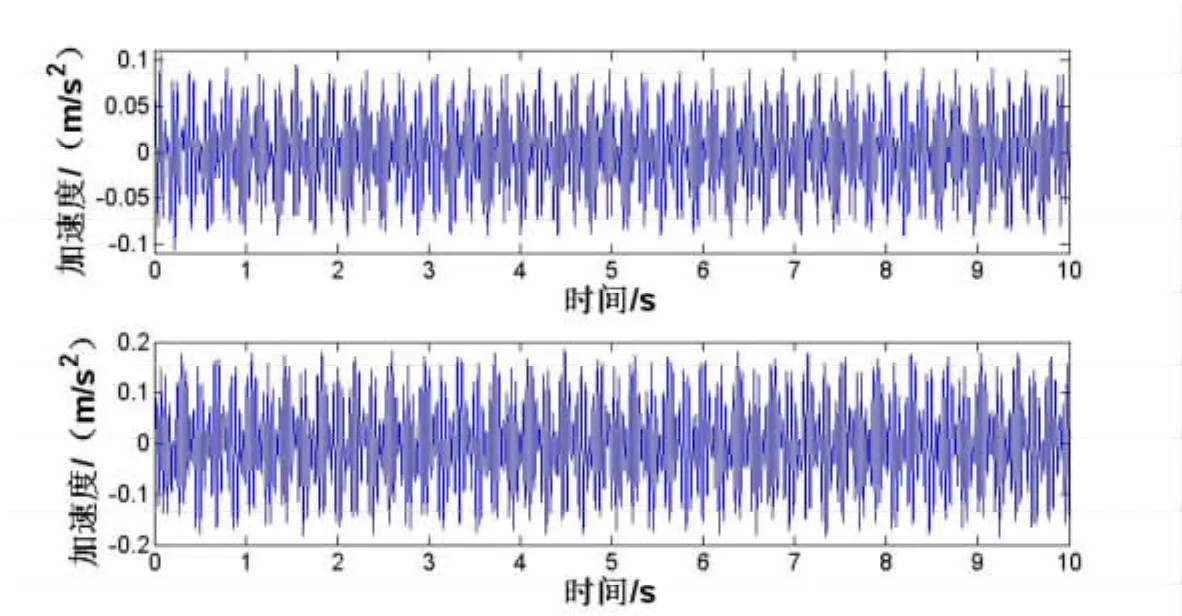

图4 部分四自由度Simulink模型
3.2 车身加速度及后轮动载均方根值仿真
参考GB 7031-2005,机械振动道路路面谱测量数据报告给出了按路面功率谱密度把路面不平度程度分为8级。本文根据Simulink程序仿真出车辆在A级、B级、C级、D级、E级道路上,车速分别为 20km/h、40km/h、60km/h、80km/h 时的车身加速度、后轮动载的时间历程数据,并在Matlab里面分别计算出了相应的均方根值,并拟合出了相应的曲线,如图5、图6所示。

图5 不同等级路面不同车速下的车身加速度均方根值拟合曲线
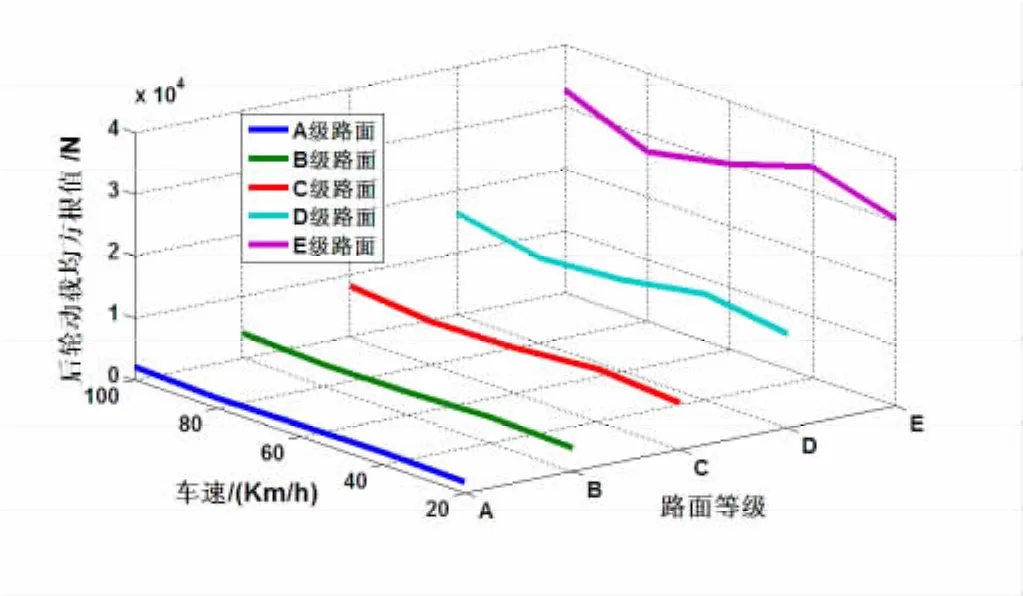
图6 不同等级路面不同车速下的后轮动载均方根值拟合曲线
4 结论
通过Simulink仿真过程和结果处理可以得到以下三点结论:
(1)利用拉格朗日方程建立了1/2车辆动力学几何模型,并基于Matlab和随机正弦波叠加法编制了不同等级路面的随机路面谱程序。
(2)按照国标GB 7031-2005,仿真了车辆在路面激励下车身加速度均方根值、车辆后轮动载均方根值;结果表明车辆在车速为40Km/h附近的时后轮动载达到最大,车身加速度在60Km/h达到了最大。
(3)汽车未来的发展会更注重车辆行驶的舒适性,但同时也必须保证行驶安全性,本文将为保证行驶安全性的基础上提高车辆舒适性能的研究提供一定的参考。
[1]余志生.汽车理论[M].北京:机械工业出版社,2006:230-232.
[2]张永林,钟毅芳.车辆路面不平度输入的随机激励时域模型[J].农业机械学报,2004,35(2):35-37.
[3]赵兰英,鲁植雄.路面不平度的分形分级参数研究[J].交通与计算机,2008,26(6):158 -159.
[4]靳晓雄.汽车振动分析[M].上海:同济大学出版社,2002:90-94.
[5]陈朝阳.汽车平顺性研究中“人-椅”系统模型再探[J].安徽工学院学报,1992,11(1):72 -79.
[6]丁玉庆.汽车振动系统的简化及数学模型的建立[J].南京理工大学学报,2001,25(4):391 -394.
[7]常巍,谢光军,黄朝风.MatLabR2007基础与提高[M].北京:电子工业出版社,2007.
[8]陈小花,张亮,李克峰.基于Simulink仿真模拟车辆垂向振动[J].机械研究与应用,2008,5(21):81 -83.
