遇限削弱积分PID控制算法在船用柴油机调速系统中的应用
2011-04-03朱鸿
朱鸿
(海军驻上海沪东中华造船(集团)有限公司军事代表室 上海 200129)
遇限削弱积分PID控制算法在船用柴油机调速系统中的应用
朱鸿
(海军驻上海沪东中华造船(集团)有限公司军事代表室 上海 200129)
遇限削弱积分PID;柴油机;控制器
针对船用柴油机,设计了一个基于遇限削弱积分PID控制算法的调速控制器,给出了该控制器的总体硬件结构框图,提出该算法的设计思想及其实现方法。仿真及试验结果证明该算法解决了普通PID算法中超调过大、响应较慢等问题,提高了系统的响应速度。
0 引言
在船用柴油机调速系统中,电子调速器已经逐渐取代电液式调速器,采用单片机技术进行速度控制,具有设备结构简单、实时响应快、控制精度高等优点。单片机和电子技术的高度发展正促使柴油机调速系统逐步从模拟化向数字化转变。目前单片机的浮点运算能力和运算速度都较以前有很大提高,在调速控制软件中已经完全可以实现数字PID算法。80C196KC单片机是Intel公司生产的高性能16位单片机,具有高效率、高速度的指令系统。针对船用柴油机在运行过程中避免出现超调过大、响应速度较慢等现象,本文采用80C196KC单片机作为控制器的CPU,设计了一种基于遇限削弱积分的电子调速系统,以满足柴油机的调速要求。
1 硬件组成
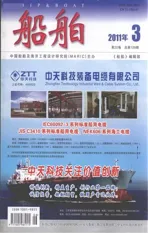
整个电子调速控制器硬件结构如图1所示,主要由微处理器80C196KC、A/D模数转换电路、电流放大电路、测速电路以及看门狗电路等组成。
PID控制系统由PID控制器、执行机构、反馈回路和被控对象组成,PID控制器对给定值R(n)与实际测量值N(n)产生的偏差e(n)进行比例、积分和微分运算后输出控制量,对受控对象进行控制。随着单片机技术的发展,在控制系统中一般用数字PID控制器。其中比较经典的数字PID的算法为:
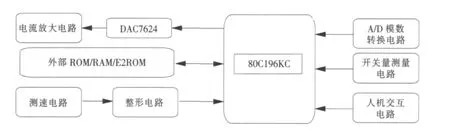
图1 控制器硬件框图

式中:n为采样序号(n=1,2,!);u(n)为第n次采样时刻的控制器输出值;Δe(n)=e(n)-e(n-1);e(n)为第n次采样时刻的输入偏差值;e(n-1)为第n-1次采样时刻的输入偏差值;Kp为比例系数;Ki为积分系数;Kd为微分系数。
图2所示是某型柴油机转速闭环控制框图,由执行机构调节柴油机油门,由PID算法实现柴油机转速闭环控制。采用磁脉冲传感器采集转速信号,计算得到的转速反馈值N(n)与设定转速值R(n)进行比较,其差值经PID算法处理后经并行数据口输出控制值到DA转换芯片DAC7264,并通过电流放大电路驱动执行机构,控制柴油机的油门大小,以达到调节转速的目的。
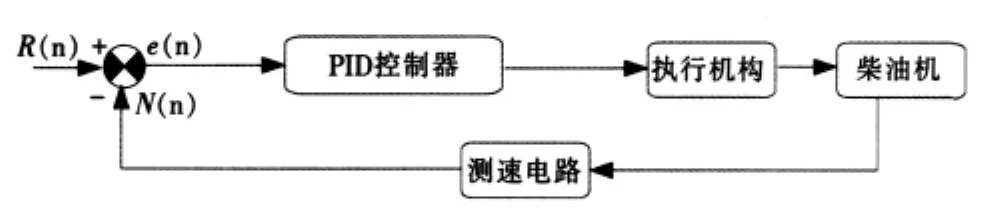
图2 转速闭环控制框图
PID控制器各校正环节的作用如下:
(1)比例放大环节
比例环节可以对控制系统的偏差信号进行成比例放大,控制器根据放大结果输出控制量,对被控对象产生较快控制作用。比例系数Kp与系统响应速度成正比。
(2)积分环节
积分环节可以消除系统的稳态误差,提高系统的控制精度。积分作用的强弱取决于积分时间常数,加大积分系数,可以减小系统稳态误差,但积分作用过大会产生较大超调,甚至引起振荡。
(3)微分环节
微分环节能反映出偏差信号的变化趋势,在系统中引入一个早期修正值,从而加快系统的响应速度,减小调节时间,改善系统的动态响应特性。
在PID控制环节中引入积分的目的,是为了消除稳态误差,提高控制精度。但在柴油机的起动、负荷突加突卸过程、大幅度增减运转速度的设定值时,短时间内转速会有很大的偏差,会造成PID运算的积分积累,出现积分饱和现象,导致系统出现较大的超调量,这是柴油机运行过程中绝对禁止的。
所谓积分饱和现象是指:若系统存在一个方向的偏差,PID控制器的输出在积分的作用下不断累积,从而导致执行机构达到极限位置。
如图3所示,若控制器输出u(n)继续增大,执行机构开度会达到最大位置,此时单片机输出控制量超出了正常运行范围而进入饱和区,执行机构停留在极限位置而不能随偏差反向立即做出相应的改变,造成控制性能恶化。进入饱和区愈深则退出饱和区所需时间愈长,这种现象称为积分饱和现象或积分失控现象。下面就从积分饱和出现的原因来改进PID控制算法。
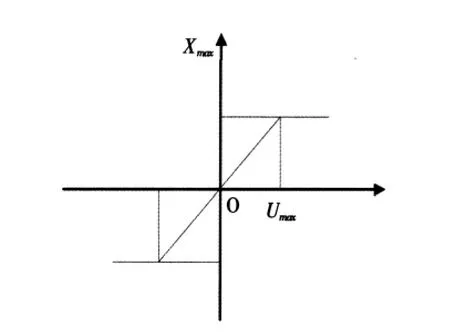
图3 执行机构饱和特性图
2 遇限削弱积分PID控制算法
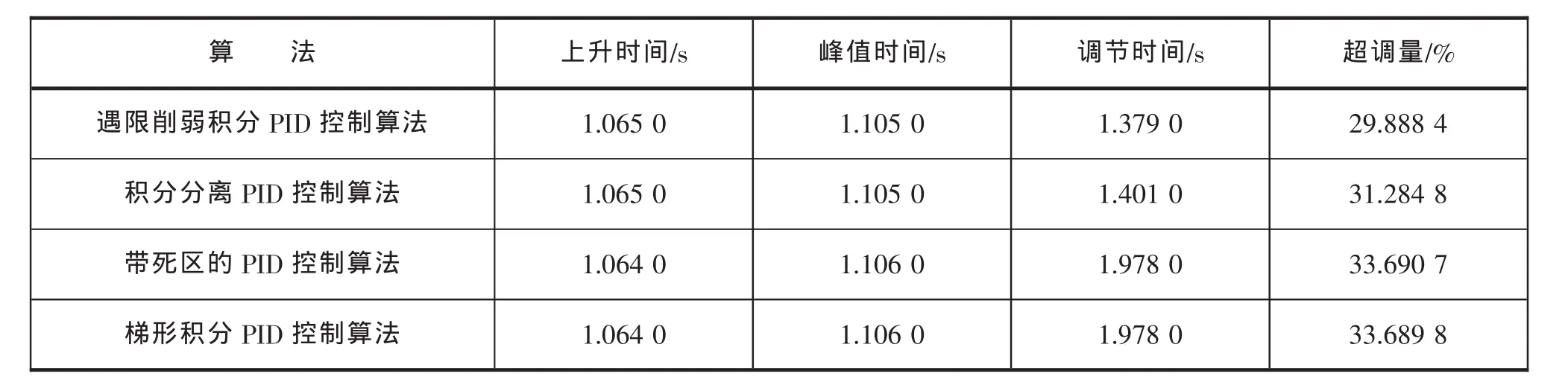
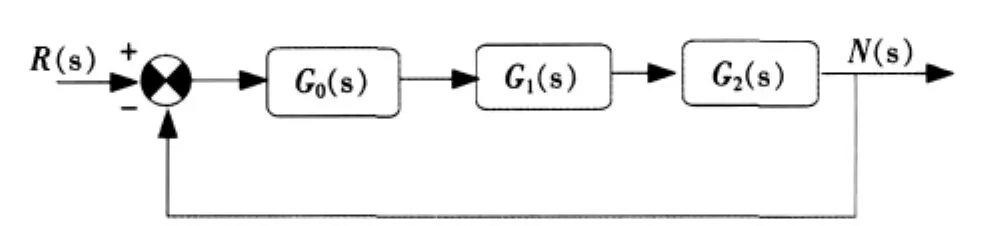
数字PID控制算法中积分项过大是引起积分饱和的原因,解决积分饱和的方法有多种,遇限削弱积分是其中的一种。遇限削弱积分的基本思想是:当控制进入饱和区以后,便不再进行积分项的加法运算,而只对积分进行削弱运算。在计算输出值u(n)时,先判断u(n-1)是否超出限制值。若u(n-1)>umax,则对负偏差进行计算;若u(n-1) 采用不同PID算法,利用Matlab仿真技术对某二阶传递函数进行仿真计算,系统输入为阶跃响应,计算结果如下: 表1、表2的数据分别为采用一阶保持器和零阶保持器时仿真系统的阶跃响应性能指标,用于比较验证所编写的程序和建立的模型的正确性。 表1、表2均对遇限削弱积分PID控制算法、积分分离PID控制算法、带死区的PID控制算法、梯形积分PID控制算法的阶跃输出进行仿真比较。 由表格中的仿真数据比较得到:遇限削弱积分PID控制算法较其他PID控制算法,其超调量和调节时间有比较明显的改善,控制效果较好。 柴油机转速控制系统模型的传递函数框图如图5所示,G0(s)为遇限削弱积分PID算法控制器的传递函数。对于执行机构来说,输入的是控制器输出的0~1 A的直流电流信号I(s),输出是一定幅值的位置信号控制柴油机油门齿条的大小,可将其近似看成一阶惯性环节G1(s);对于柴油机来说,输入的是执行机构输出的0~55mm的油门齿条信号w(s),输出是0~500 r/min的速度信号N(s),也可将其近似看成一阶惯性环节G2(s)。整个系统前一环节的输出即为后一环节的输入,也就是逐个顺次把环节连接起来,这是一个串联连接方式的系统,总传递函数等于各环节传递函数的乘积G’(s)=G1(s)·G2(s),所以柴油机转速控制系统模型的传递函数为二阶传递函数。在实际应用中,经过试验对比,遇限削弱积分PID控制算法相对其他算法,其超调量和调节时间有比较明显的改善,控制效果较好。 表1 采用一阶保持器时仿真系统阶跃响应性能 表2 采用零阶保持器时仿真系统阶跃响应性能 图5 转速控制传递函数框图 本文利用Matlab仿真技术对二阶控制系统进行仿真验证,数字仿真结果证明了遇限削弱积分PID算法能够缩短调节时间、降低超调量。在柴油机实际调速过程中可以利用该PID算法实现精确的调速闭环控制。遇限削弱积分PID控制算法要根据具体的系统特点来选择参数。利用单片机实时运算和控制功能可实现柴油机快速稳定的调速功能。 [1]陶永华等.新型PID控制及其应用[M].北京:机械工业出版社,1998. [2]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003. [3]刘叔军,盖晓华.控制系统应用与实例[M].北京:机械工业出版社,2006. [4]何济民.转速闭环变频调速系统的建模与调节器参数设计[J].电器传动自动化,2000,22(1):15-16. [5]董锋斌.闭环变频调速系统的一种简易设计方法[J].电气时代,2007,(3):124. Application of advanced PID in diesel engine speed control system ZHU Hong advanced PID control algorithm;diesel engine;controller A diesel engine speed controller was designed based on the advanced PID control algorithm.The general hardware structure flowchart for the controller is introduced,and the design and implementation of the algorithm is discussed.The simulation result shows that this algorithm can improve response speed and control accuracy compared with general algorithm. TK421;U262.11 A 1001-9855(2011)03-0059-04 2010-11-29 朱鸿(1968-),男,汉族,工程师,主要从事船舶动力装置设计研究工作。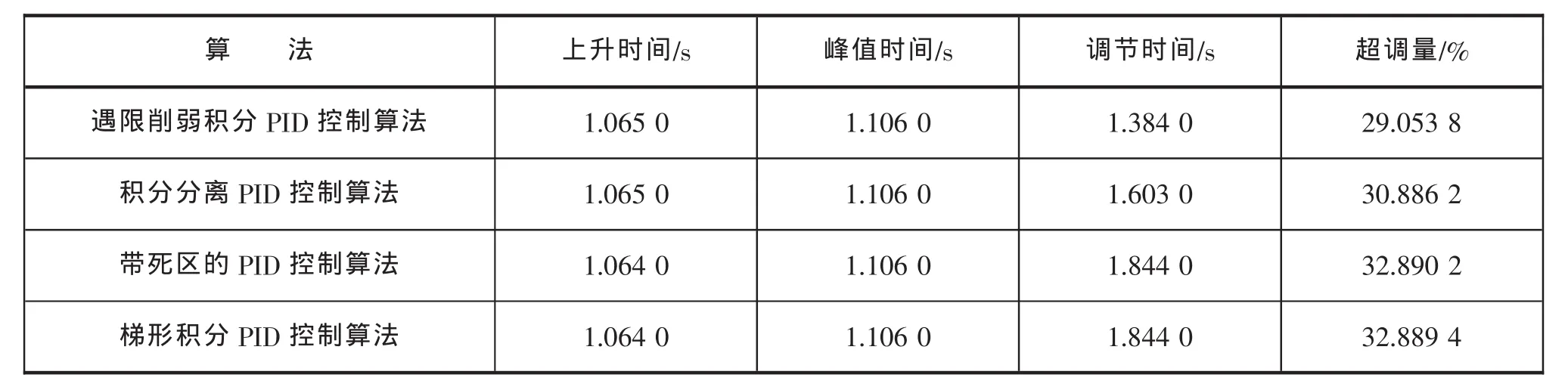
3 结语
(Naval Representation in Hudong Zhonghua Shipbuilding(Group)Co.,Ltd.,Shanghai 200129,China)