大型小水线面双体船纵向运动稳定性及纵向运动分析
2011-04-03邵优华
邵优华
(海军驻上海地区舰炮系统军事代表室 上海 200135)
大型小水线面双体船纵向运动稳定性及纵向运动分析
邵优华
(海军驻上海地区舰炮系统军事代表室 上海 200135)
大型小水线面双体船;纵向运动稳定性;STF方法;稳定鳍
以大型小水线面双体船为研究对象,观察其在静水中的纵向运动稳定性以及根据STF方法结合粘性修正方法预报其在波浪上的纵摇、垂荡运动等。首先根据ROUTH稳定性准则从定性角度观察其稳定性,然后从定量角度进行分析,给出其稳定性运动品质评价指标,并与配置稳定鳍后进行对比。最后给出配置稳定鳍后小水线面双体船的纵向运动预报。
0 引言
通常认为小水线面双体船型具有良好的耐波性,这是因为其水线面积相对于水线下主体水平投影面积较小,使得所受波浪力较小,从而在波浪上表现的运动特性相对于吨位更大的单体船更佳。但是水线面面积较小,水线下潜体型主体占有很大部分排水体积,使得其纵向恢复力较小,“MUNK”力矩足以使其在较高航速时失去纵向运动稳定性,而不能回复到初始平衡位置。因此,纵向运动稳定性是影响小水线面双体船航行性能的重要指标。
本文对小水线面双体船在静水中的纵向运动稳定性从定性和定量角度进行分析,给出稳定性运动品质评价指标,以判断该船是否具有纵向运动稳定性。考虑到航行浮态,尤其是纵倾的变化,应该配置适当的稳定鳍,以进一步改善该船静水航行状态的纵向运动稳定性品质,并减缓船在波浪中的运动幅值。图1为小水线面双体船的线型图。
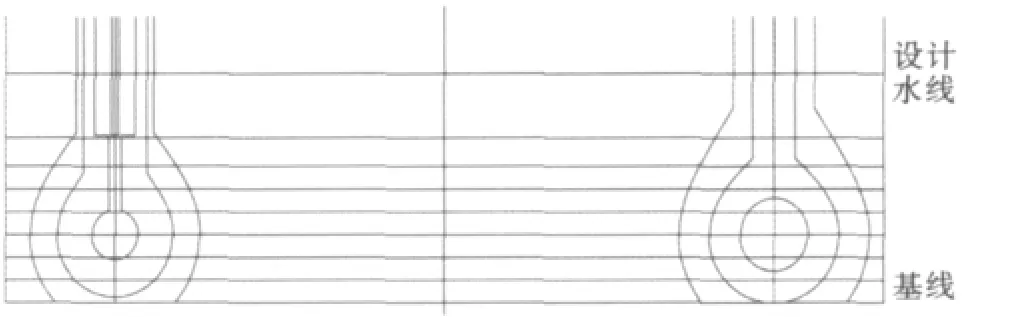
图1 小水线面双体船的线型图
小水线面双体船型为细长体,理论上很适合于用切片法来预报其在波浪中的运动特性,但也有其特殊性,由于水下主体剖面宽度通常为水线宽的2倍左右,剖面垂向振荡的粘性阻尼占很大的比例,因此,运动预报中根据势流理论得到的水动力系数还需要附加部分粘性修正项。
1 纵向运动稳定性计算模型
1.1 纵向运动稳定性方程及特征方程
为分析SWATH船的纵向运动稳定性,仅考虑SWATH船的纵摇与垂荡的耦合运动方程。静水中,当船以速度U沿某一方向等速直线运动时,在小扰动下,其纵摇与垂荡的耦合运动方程为:

式中:M为船的自身质量;
I5为船自身纵摇转动惯量;
Aij、Bij、Cij分别为对应船的广义附加质量、阻尼系数以及恢复力系数;
所用坐标系取右手规则的平移直角坐标系OXYZ。X轴指向船前进的方向,Z轴竖直向上、且过船的重心,OXY平面位于静水面上,船以速度U匀速前进。
方程中的各系数采用切片法计算,系数Aij、Bij、Cij的计算式为:
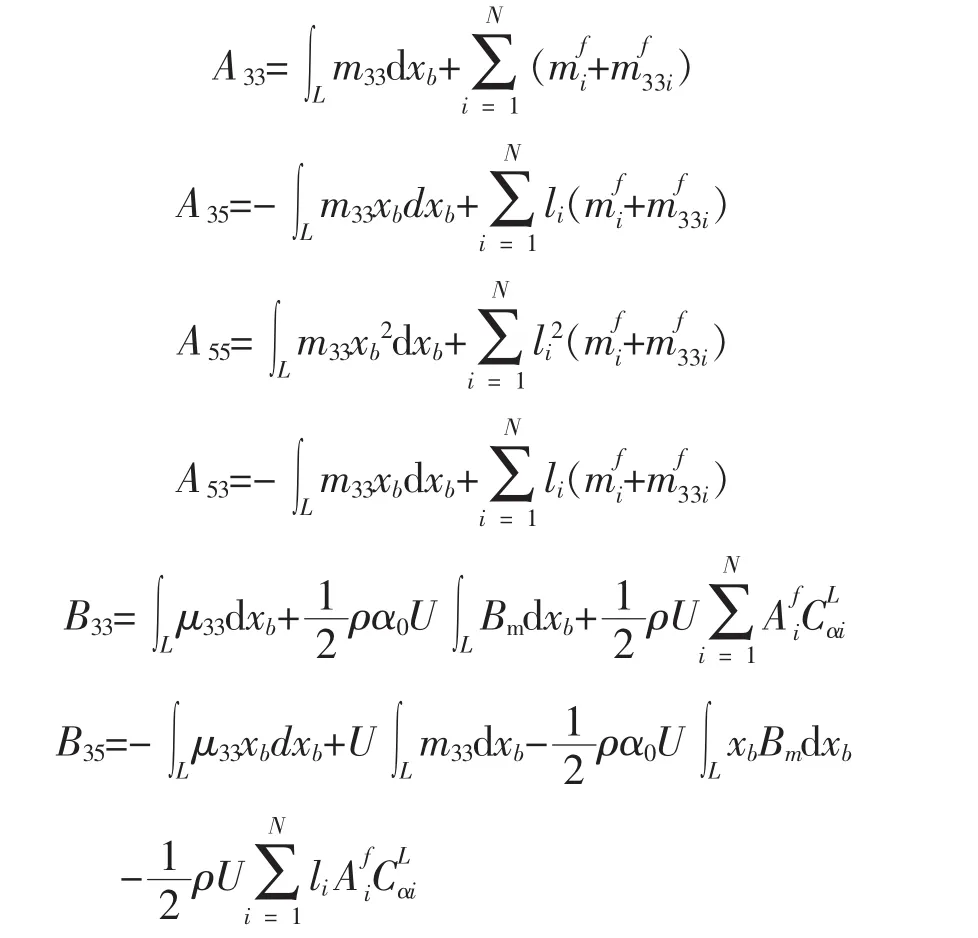

式中:∫L表示沿设计水线下船总长的积分;
m33、μ33分别表示船体剖面的垂荡附加质量和兴波阻尼系数;
yw,Bm分别表示船体水线面宽度和水下部分潜体横剖面的最大宽度,m;
a0为潜体上的粘性升力系数,可取a0=0.07;
由于纵向运动稳定性方程为常系数的齐次线性微分方程组,设其特征解为:
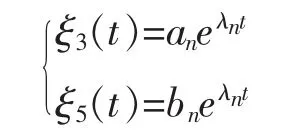
式中:an、bn为常数;λn为特征根;t为时间。
将特征解代入运动稳定性方程可得相应的特征方程为:
式中:
SWATH船具有纵向稳定性的充要条件是:特征方程的所有根必须是负实部。可以采用ROUTH稳性准则:
根据稳定性判据e=C33C55-C53C35>0以及C33>0的条件可知:

即:
可得到:

可以此作为船刚失稳的临界航速。
1.2 运动阻尼频率特性和瞬态响应指标
假设在垂荡和纵摇的耦合运动中,船对扰动的响应是振荡响应。C.M.Lee指出,SWATH模型试验表明,对扰动的振荡响应主要取决于垂荡固有频率,且其垂荡和纵摇运动分别对应两组共轭的复数根。通常垂荡振荡对应的复根实部的绝对值要小于纵摇振荡对应的值,而虚部的绝对值则大于纵摇对应的值。这表明垂荡振荡衰减得比纵摇慢,自然周期则比纵摇短。因此,可在后面的分析中,将实部绝对值较大而虚部绝对值较小的根λ1,2对应于船的垂荡运动;而将另一对根λ3,4称作纵摇运动。相应的特征根是两对共轭复根:

由四个特征根,可得到船的有阻尼振荡频率为λ3I和λ5I,即:
表示船的自由垂荡和纵摇衰减。
相应的表征船的垂荡和纵摇运动性能的特征参数有:
1)有阻尼振动周期T3=2π/|λ3I|,T5=2π/|λ5I|
2)无阻尼振动频率(固有频率)

3)半衰期(运动幅值衰减到一半时的时间)

4)阻尼比(无因次衰减系数)
2 纵向运动稳定性计算
以某型小水线面双体船为例。
2.1 船体主要参数

表1 主尺度参数
2.2 纵向运动稳定性及运动品质参数
经计算,该船特征方程满足纵向运动稳定性判据,即在水线长傅汝德数0.331时具有纵向运动稳定性。为进一步评价纵向运动稳定性的优劣,又计算了运动品质,详见表2。
从表2可以看出,特征根实部绝对值很小,也就是说,一旦水动力系数计算不准确或者稍稍发生变化,都将可能导致纵向运动失稳;此外,无因次阻尼系数小,以及半衰期较长。因此,应该配置适当的稳定鳍,以改善它们的纵向运动稳定性品质。
2.3 配置稳定鳍后纵向运动稳定性及运动品质参数
稳定鳍尺寸的选择应能保证船的纵向运动稳定性,并改善船在波浪上的运动性能,平衡作用于船体上的水动力纵倾力矩。本文选择了三组鳍方案。
经计算,带稳定鳍后,该船特征方程满足纵向运动稳定性判据,即在水线长傅汝德数0.331时具有纵向运动稳定性。

表2 阻尼频率特性和瞬态响应指标
配置稳定鳍后的运动品质计算结果详见表3。

表3 稳定鳍的主要参数
从以上计算结果可以看出,无论哪一组稳定鳍方案的运动品质均比不带鳍的好。带稳定鳍后特征根的负实部均比较远离虚轴,因此它们的鲁棒性(Robustness)均较好,即抗扰动能力强;纵摇和垂荡阻尼均有较大幅度增加,一方面表现在阻尼系数有可观的增加,另一方面运动幅值衰减到一半时间缩减到数秒。稳定鳍对小水线面双体船的频率特性影响不大。方案3的鲁棒性最好,阻尼系数更大,临界速度更高,因此方案3更适合作为该小水线面双体船稳定鳍的配置方案。
3 配置稳定鳍后在波浪中的纵向运动预报
3.1 计算方法
本文采用的方法是切片法结合粘性修正方法,即将因粘性产生的和鳍上动升力产生的水动力系数部分直接加到按势流理论计算出的水动力系数中,然后计算小水线面双体船船在波浪中的纵摇、垂荡、首中尾垂向加速度等。这里给出因粘性和鳍上升力产生的水动力系数部分。
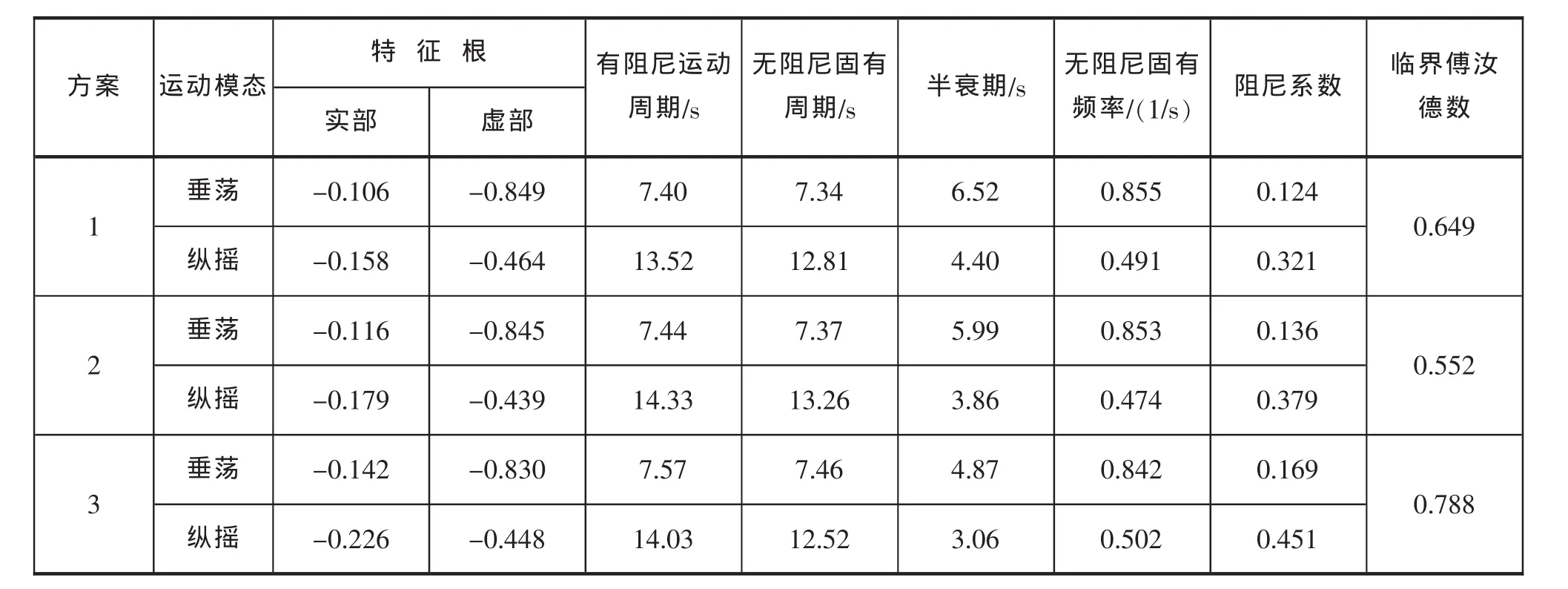
表4 带鳍方案阻尼频率特性和瞬态响应指标

α0、CD、分别为潜体的粘性升力系数、潜体的粘性阻力系数、鳍的升力系数斜率、鳍的粘性阻力系数;
ω0、A、K0、β、U分别为波浪频率、波幅、波数、浪向角(0°为迎浪)、航速;ρ为水的密度。
3.2 主要参数及船体线型图
详见表5。
其中垂向加速度计算位置取首部、重心处、尾部。首尾鳍按照固定状态计算。首鳍位于重心前17.2m,尾鳍位于重心后19.8m。
3.3 规则波中的幅值响应
图2~5中给出了小水线面双体船在规则波浪中迎浪和随浪情况下的纵摇和垂荡幅值响应函数曲线。从图中可以看到,有航速时,小水线面双体船的运动有了很大的改变,尤其是纵摇响应曲线,在峰值处可降低40%以上,同时峰值位置向短波区移动。配置首尾鳍后,响应曲线峰值在迎浪情况下可降低30%以上。
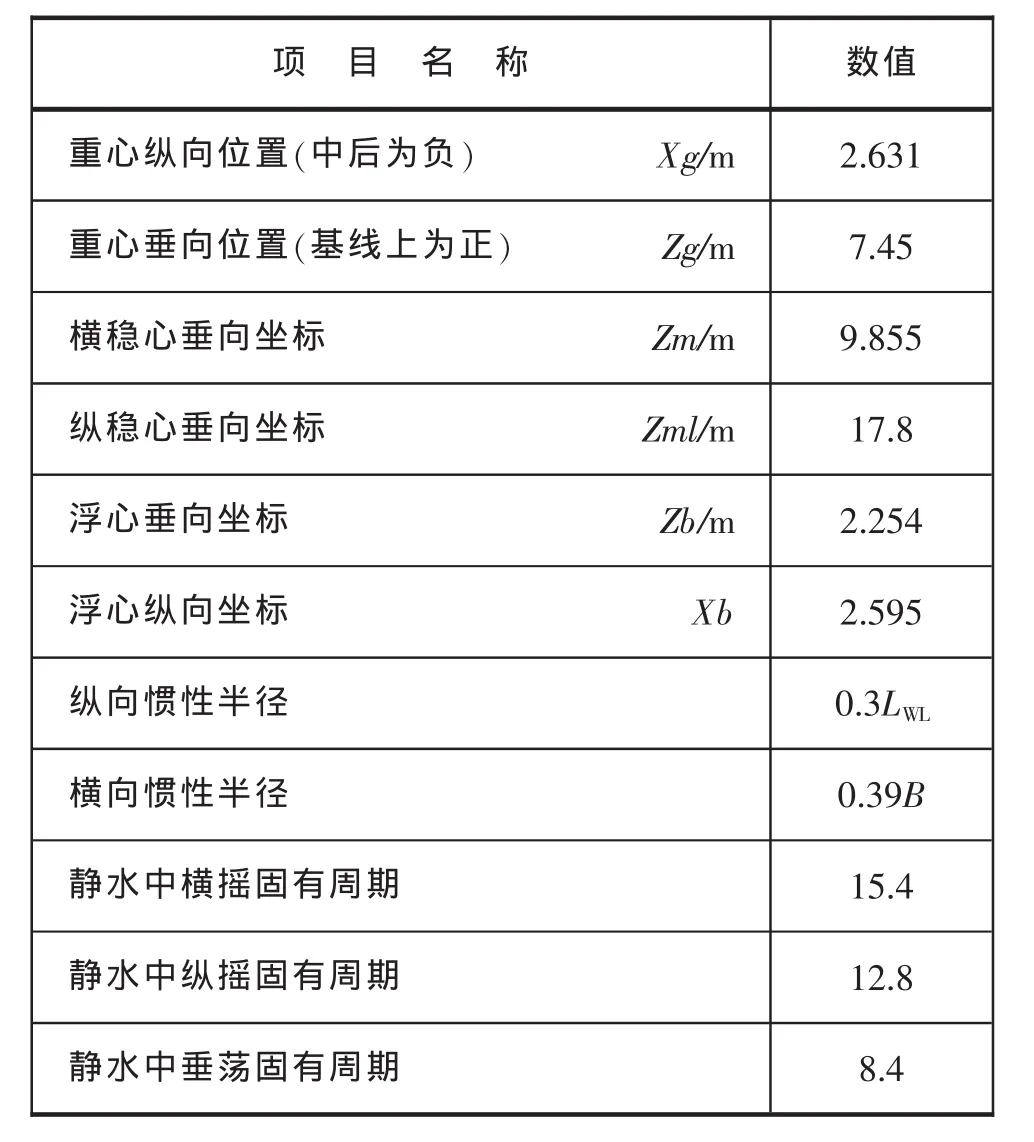
表5 主尺度参数

图2 迎浪中纵摇幅值响应函数曲线

图3 随浪中纵摇幅值响应函数曲线
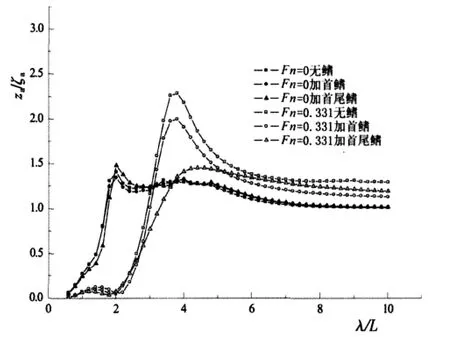
图4 迎浪中垂荡幅值响应函数曲线

图5 随浪中垂荡幅值响应函数曲线
3.4 长峰不规则波浪中纵向运动统计预报
计算各浪向时船体的运动统计值,海浪谱采用ITTC双参数谱:

从表6中可以看出,在迎浪有航速时,船的纵摇运动有了较大改善,可以降低30%以上;但是在随浪情况下却没有改善,尤其是较低海况时,纵摇反而有所增加。配置稳定鳍后,在水线长傅汝德数Fn=0.331时,迎浪时纵摇可降低50%以上,但是随浪时的纵摇仍然没有改善,反而有增加的趋势。配置稳定鳍后船的垂荡有所降低。
4 结语
(1)本文计算了大型小水线面双体船在静水中的航态稳定性和在波浪中的运动特性。配置稳定鳍后,特征根的负实部均比较远离虚轴,鲁棒性更好;纵摇和垂荡阻尼均有较大幅度增加,一方面表现在阻尼系数有可观的增加,另一方面运动幅值衰减到一半时间缩减到数秒。稳定鳍对小水线面双体船的频率特性影响不大。方案3的鲁棒性最好,阻尼系数更大,临界速度更高。因此方案3更适合作为该小水线面双体船稳定鳍的配置方案;
(2)在较高速度迎浪情况下航行,能减小SWATH船的不规则波中纵向运动响应,有利于发挥其优越的耐波性能;
(3)艏艉鳍组合使用比单艏鳍作用更能提高SWATH船在不规则波中的纵向运动性能;

表6 长峰不规则波浪中纵向运动统计单幅有义值
(4)小水线面双体船的耐波性预报必须计及粘性影响。切片理论是一种有效实用的SWATH耐波性预报方法,可用于方案设计阶段小水线面双体船的耐波性预报。
根据本文的计算结果所得到的规律与有关文献相同,但这仅是理论计算的结果,后期尚需通过试验来验证。
[1]LEEC.M.and CURPHEY R.M.Prediction of motion,stability,and wave load of small-water plane-area Twin-Hull Ships[J].SNAME Transactions,1977,(85):94-130.
[2]黄鼎良.小水线面双体船性能原理[M].北京:国防工业出版社,1988.
[3]董祖舜,董文才.小水线面双体船纵向运动稳定性的简化判据及分析[J].中国造船,1994,(41):36-48.
[4]半潜双体船译文集[M].上海:七○八研究所,1976.
Longitudinal dynamic stability and motion analysis of a large Small-Waterplane-Area Twin-Hull
SHAO You-hua
(Naval Representative Office of Shipboard Gun,Shanghai 200135,China)
large SWATH;longitudinal dynamic stability;STF method;stabilizing fin
The longitudinal dynamic stability of a SWATH in still water is studied and its pitch and heave motion are predicted by STF method with viscosity correction.Firstly,the stability of SWATH is studied qualitatively according to ROUTH stability criterion,and then be analyzed quantitatively to provide the quality evaluation indexes which were compared with those having stabilizing fin.Finally,the longitudinal motion of SWATH with stabilizing fin is predicted.
U674.951;U661.1
A
1001-9855(2011)03-0001-07
2011-02-02
邵优华(1964-),男,汉族,高级工程师,主要从事舰船总体研究设计工作。