运动目标状态序贯贝叶斯滤波
2011-03-26蒋富勤赵航芳
蒋富勤,赵航芳
(杭州应用声学研究所,浙江杭州310012)
0 引言
在被动目标跟踪中,一个重要的问题是目标运动分析(Target Motion Analysis,TMA)。观察者利用被噪声染污的测量数据估计目标的状态,如目标的位置和速度。对于这样一个问题,利用状态-空间模型对系统进行完全表征,结合先验知识和数据知识,实现序贯贝叶斯滤波。在贝叶斯方法中,根据贝叶斯定理实现先验、似然到后验的知识积累过程。当有新数据可用时,序贯滤波方法提供了一个合适的框架用于估计和更新系统的待估参量。通常,这些参量是随着时间或空间演化的。上一步获得的关于待估参量数值演化和不确实性的知识,对于下一步的估计是无价的[1]。因而,建立一个模型对这一过程进行描述是很有必要的:状态-空间模型。它包含了描述该系统所要求的所有相关信息,是一个通用和宽容的模型[2]。
1 状态-空间模型
目的是序贯跟踪随时间或空间演化的目标状态。因而需要建立一个模型,对这一演化知识进行描述并加以利用。离散时间状态-空间模型可以表示为[1]:

式中,表征状态转移概率p(xk|xk-1),变量vk为已知PDFp(vk)的过程噪声,表征似然p(yk|xk),变量wk为已知PDFp(wk)的测量噪声。
2 贝叶斯滤波
贝叶斯方法将待估参量看作一个随机变量,要估计的是它的一个现实。信息具有可加性,因而利用先验信息可以改进估计器的精度。贝叶斯定理提供了嵌入先验知识的机制,实现先验、似然到后验的知识积累过程。
使贝叶斯风险最小,可得贝叶斯估计器。不同的代价函数可以得到不同的估计器。如二次误差代价函数可以推出MMSE估计器,它是一个后验平均的形式,即E(xk|Yk),其中Yk=(y1,y2,…,yk)表示第k步可以利用的数据集;取舍误差代价函数可以推出MAP估计器
2.1 卡尔曼滤波
当待估参量和数据服从联合高斯分布时,卡尔曼滤波器是最佳MMSE估计器,否则它是最佳LMMSE估计器[3]。高斯分布仅需用它的前二阶矩来表征,而卡尔曼滤波在每一步中传递待估参量的均值和协方差,因而可以完全表征它的后验PDF。当函数fk,hk非线性时,可以采用卡尔曼滤波的推广形式。如对它进行解析线性近似,可以得到扩展卡尔曼滤波。对它进行统计线性近似,可以得到unscented卡尔曼滤波[4]。它们对于适度的非线性问题可以获得好的性能。
2.2 质点滤波
对于非线性程度较高和复杂过程噪声情况,需要采用数值方法来计算后验PDF,序贯蒙特卡罗方法应运而生,即质点滤波。它的基本思想是用一组具有权值的样本集合{x,w}来近似表示后验利用序贯重要性采样方法,可以获得[5]:

3 仿真结果分析
假定目标在x-y平面内做转弯运动:
式中,xk=(xk,,yk,)T表示k时刻目标的状态向量,xk和yk表示k时刻目标在直角坐标系中的坐标位置分量和表示k时刻目标在x、y方向上的速度,vk=(vx,k,vy,k)T表示k时刻的过程噪声,服从均值为零,协方差矩阵为Q=q I2的高斯分布,I2表示2×2的单位矩阵,T为测量时间间隔,ω为目标转弯角速度。假定状态初始先验分布服从均值为x0,协方差为M的高斯分布。
测量方程假定为:

式中,θk表示k时刻获得的被噪声染污的目标方位值,wk表示k时刻的观察噪声,服从均值为零,方差为r的高斯分布。
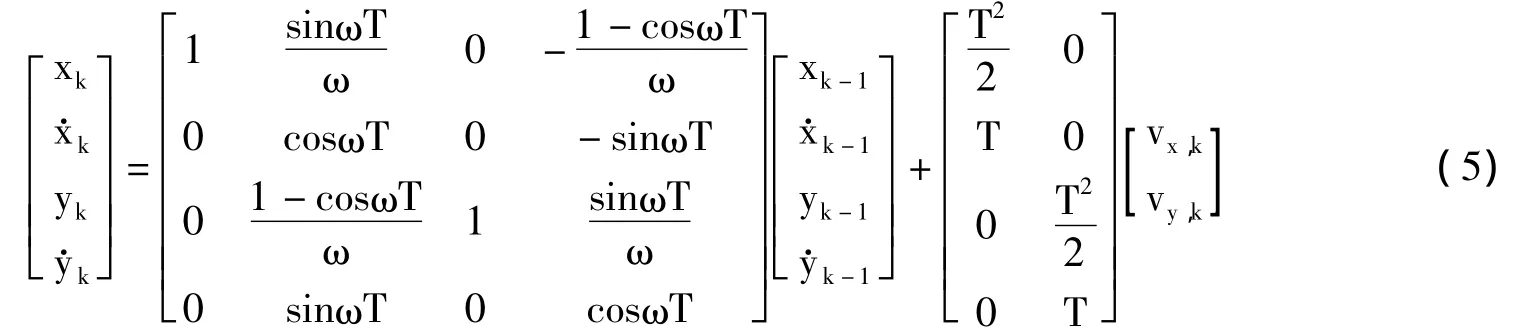
假定目标起始位置位于(-1 200m,1 200m),初始速度为(6m/s,8m/s),目标转弯角速度ω=-1°/s,即沿顺时针方向转弯。观察者位于坐标原点,前200s静止不动,第200s后开始沿着x轴负方向以4m/s的速度作匀速直线运动。观察时间间隔T=1s,总观察时间为1 200s,过程噪声中q=0.01,观察噪声的标准差为1°,即方差r=0.000 3。初始先验分布的均值x0=(-600,3,600,4)T,协方差M=diag(10 000,4,10 000,4)。目标和观察者的实际运动轨迹如图1所示。方位θk与xk/yk的关系表明测量方程具有一定非线性,是一个非线性问题,需要采用卡尔曼滤波的推广形式和质点滤波方法进行处理,如图2所示。3种方法(EKF、UKF和PF)在各个时刻的距离估计误差如图3所示。3种方法的跟踪结果与目标相对于观察者的运动轨迹之间的对比如图4所示。从图4中可以看出,对于这样一个非线性问题,3种方法都可实现跟踪。其中UKF的距离估计误差略小于EKF,PF的距离估计误差最小,性能最佳。这是因为EKF和UKF采用非线性问题线性化的方法,这会带来误差,在非线性问题适度的情况下,这种误差是可以容忍的,因而它们依然可以实现跟踪。而PF直接采用一组具有权值的样本集合来近似后验PDF,只要选取足够多的样本和合适的重要性密度,它可以很好地表征后验PDF,其带来的误差要小于EKF和UKF,因此PF的性能最佳。
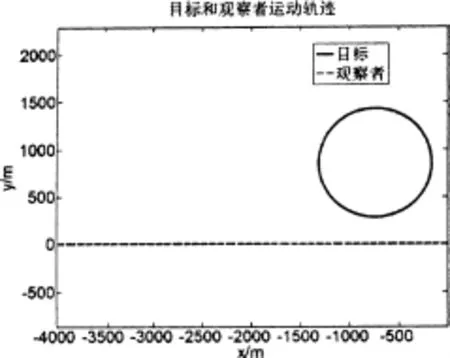
图1 目标和观察的运动轨迹
图2 方位θk与xk/yk的关系
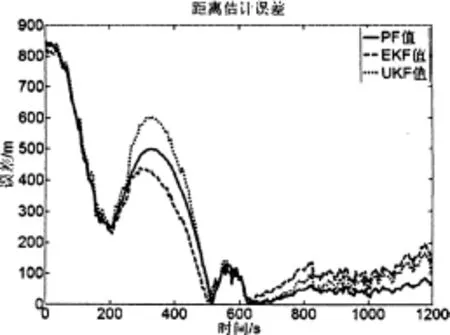
图3 3种方法的距离估计误差
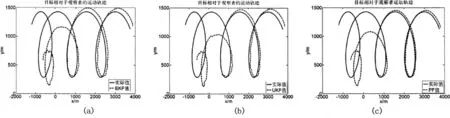
图4 3种方法的跟踪结果与目标相对运动轨迹之间的对比
4 结束语
对于运动目标状态跟踪问题,利用状态-空间模型对状态的空间或时间演化知识加以表征,采用序贯贝叶斯滤波方法可以有效地利用前一步的后验PDF和状态演化的先验知识。状态的后验PDF包含了所有可用的统计信息,因而可以说提供了估计问题的完全解。仿真结果验证了序贯贝叶斯滤波方法的有效性。对于所给的非线性问题,在EKF、UKF和PF 3种方法中,PF方法的性能最佳。
[1]Yardim C,Michalopoulou Z H,Gerstoft P.An overview of sequential Bayesian Filtering in ocean acoustics[J].Ocean Eng,2011,36(1):73-91.
[2]Candy J V.Bayesian Signal Processing Classical Modern and Particle Filtering Methods[M].New York:Wiley,2009:95.
[3]Kay S M.Fundamentals of Statistical Signal Processing–Volume I Estimation Theory[M].Englewood Cliffs:Prentice-Hall,1993:309-477.
[4]Julier S,Uhlmann J,Durrant-White H F.A new method for nonlinear transformation of means and covariances in filters and estimators[J].Autom Contral,2000,45(3):447-782.
[5]Arulampalam M,Maskell S,Gordon N,etal.A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J].Signal Process,2002,50(2):174-188.