全地面起重机多体动力学仿真平台研究
2011-03-16王殿龙滕儒民
王殿龙,关 伟,滕儒民,陈 礼
(1.大连理工大学 机械工程学院,辽宁 大连 116024;2.大连益利亚工程机械有限公司,辽宁 大连 116023)
对机械系统进行动力学仿真计算,作为1项先进设计、制造技术,广泛应用于汽车制造、工程机械、航天航空、国防工业以及通用机械制造业等诸多领域[1-3].利用虚拟样机技术研究全地面起重机对指导其结构设计具有重要意义.
国内虚拟样机技术的研究相对较晚,最主要的是没有形成自己特色的商业软件,主要以应用国外的现有软件为主,利用1种或多种软件进行应用型研究.比如采用ADAMS,PDM,SIMPACK,MATLAB等开发中间件集成,并进行虚拟样机工程的构建.国内研究虚拟样机的单位主要集中在科研机构和高校,如1988年北京理工大学先后开发了针对空间机构进行运动学分析的软件KASM和通用机构的运动学动力学分析软件GMKDS;1999年中国农业大学周一鸣教授主持开发了机械系统虚拟样机软件原型系统;上海交通大学洪嘉振教授基于递推组集建模法开发的支持刚柔混合、接触碰撞和模型变拓扑的多体系统动力学分析软件DAFMB[4];华中科技大学也自主开发了复杂机械系统仿真平台InteDyn[5];2005年大连理工大学齐朝晖教授根据前沿的多体系统动力学理论,利用先进的计算软件MATLAB编写了Dynamics of Multi-Body System 软件等[6,7].
虽然已有虚拟样机技术成功应用于起重机械研究的案例,但是仍然存在很多问题.针对专业复杂的模型时,商业软件的局限性表现很明显,具体体现在商业软件建模复杂,效率低,修改困难,使产品设计周期延长,导致设计成本相应增加[8-10].特别是针对工程起重机这类部件繁多、结构复杂、计算工况繁多、对动力学计算要求较高的产品,利用商业软件的通用模块进行动力学计算,效率很低,很难达到预期的效果,所以必须针对专业产品开发融合工程设计知识且支持模型模块化功能的专用平台.
本文结合多体系统动力学知识,通过对全地面起重机结构知识的归纳概括和总结,对其进行动力学模型的简化,设定初始参数,结合计算机数值计算方法,实现全地面起重机的动力学计算.工作的主要意义在于专业性强,只针对单个的产品进行研究,可以完成多种工况的快速参数化建模、连续仿真及结果统一输出,其效率高,避免了商业软件重复建模,逐步仿真及结果单次输出,仿真效率低等缺点.
1 全地面起重机动力学模型简化
多体系统中物体之间的连接方式称为多体系统的拓扑结构.为描述系统的拓扑结构,通常用不同的几何图形来分别表示系统的部件和运动关系.
机械系统都可以简化成拓扑结构型式,拓扑结构图主要包括表示物体的椭圆,表示相邻物体之间相对运动关系的箭头,在多体系统动力学理论中称为铰,表示零号基础物体的矩形,标号为B0.如图1a为某吨位全地面起重机结构简图,b为其结构拓扑图.根据全地面起重机的结构特点,将其分为底盘、转台、臂架、油缸等各个模块.B0为下车,包括支腿、底盘驾驶室、配重等,B1为转台,B2为基本臂,B3—B6为2—5节伸缩臂,B7为伸变幅油缸缸筒,B8为伸变幅油缸活塞杆;h1—h8为描述各个部件之间相对运动关系的铰的标号.
其多体系统的动力学方程可以写成:

式中:M为8×8系统质量矩阵;Φq雅克比矩阵;q为8×1的系统广义坐标;λ为拉格朗日乘子;F为8×1广义力列阵;Φt为约束方程对时间求偏导;ξ1为正阻尼系数;ξ2为正刚度系数;Φ为8×8系统约束方程.

图1 结构拓扑图Fig.1 Structural topology
2 软件平台设计
通过分析全地面起重机结构特点,以多体系统动力学理论为基础,针对其开发的1款专用动力学仿真软件.相对商业动力学软件,本平台的主要优点有:软件针对性强,模型参数固定,便于修改模型,且在部件参数改变时,不会改变约束关系.全地面起重机由不同臂架组合和变幅角度组成上百种工况.若都进行分析,利用商业软件需要建上百种模型,分析上百次;利用本平台,只需预先输入各个工况初始参数,则可同时完成所有工况的仿真,增强了模型的重用率,可根据需要定制输出各个部件的受力、质心位移、速度及加速度,从而便于进行强度、刚度分析,为结构设计提供帮助.
2.1 软件平台总体结构
动力学软件的总体结构对软件系统的总体功能和系统的可维护性等方面有着至关重要的作用.经典的动力学软件一般都分为前处理数字建模、求解器仿真分析、后处理结果输出三大模块.全地面起重机动力学仿真平台也采用此种模块型式,如图2所示,为全地面起重机动力学仿真平台总体功能结构.

图2 全地面起重机动力学仿真平台总体功能结构Fig.2 Functional framework of dynamic simulation platform
用户通过软件的前处理模块建立全地面起重机的参数化模型,本平台采用以.txt数据形式进行保存,然后将其输入到求解器模块,在此完成动力学方程的构造和求解,并将其计算结果写成文本格式输出,最后,通过后处理模块,用户可根据具体的需要,以曲线或动画形式得到比较直观的仿真结果.
2.2 软件描述及实现
2.2.1 前处理模块
前处理部分的主要功能是生成计算模型文档.其主要内容包括:机械系统描述、运动约束描述、外力类型描述、初始参数描述、求解设置描述等.软件通过图形界面进行参数的输入,然后自动建立运动学模型文档,图3为全地面起重机动力学仿真平台前处理模块描述框图.

图3 全地面起重机动力学仿真平台前处理Fig.3 Preprocess framework of dynamic simulation platform
(1)机械系统描述用于描述整个机械系统模型的信息,主要包括:系统信息说明、部件属性说明、结构拓扑关系说明及零号物体参数设置和重力加速度设置.
(2)运动约束描述用于说明各个部件之间的运动关系,以及位置姿态、速度和加速度描述;主要为运动方式描述及部件之间的相对坐标方位描述.
(3)驱动类型描述用于说明施加在各个物体上外力、力矩的类型及随时间变化规律.
(4)初始参数描述用于说明系统的自由度个数及各个自由度的初始值,用以确定整机初始姿态.
(5)求解控制描述用于设置求解器的参数.主要包括:求解器选择、积分终止时间、最大积分步长、相对精度、绝对精度、求解器参数.
2.2.2 求解器模块
求解部分的主要功能是组装动力学方程并进行求解计算.
(1)求解参数准备主要是为求二阶微分方程,即加速度方程做准备,主要包括:各个物体和铰的初始位置、初始速度、初始加速度、初始方位、初始角速度、初始角加速度设置,以及约束和外力、力矩、力元等参数设置.
(2)组装动力学方程:首先,求解广义力矩阵和系统质量矩阵;然后,处理约束条件;最后,推导约束系统动力学方程;返回到求解器.
(3)求解控制和求解:通过求解器控制对求解器进行设置,对求解器设置完毕后,即可求解得出计算结果.
2.2.3 后处理模块
仿真动画显示功能,用户可以很方便地控制动画播放,而且可以选择最佳观察视角,便于用户完成模型排错任务.实现在播放三维动画的同时,显示曲线的数据位置,从而可以观察运动与参数变化的对应关系.
为方便验证仿真分析结果数据的有效性,可以输入测试数据,并将其与仿真结果数据进行比较及误差分析;还可对数据结果进行数学运算、对结果进行分析处理.
3 仿真平台结果验证
本文在不考虑负载作用的情况下,对其臂架从水平开始变幅的动态特性进行仿真,仿真时间为3s,仿真采用定步长为0.01s,计算精度为10-5.得到其各个部件的动态参数,并对此种情况下对本仿真平台和ADAMS的仿真结果进行误差分析.表1为某吨位全地面起重机的参数.

表1 某吨位全地面起重机的参数Tab.1 Parameter list of an all-terrain crane
如图4—图7所示,分别为臂架变幅时,臂头的位移曲线及位移绝对误差曲线.

图4 水平向前方向位移仿真分析结果对比Fig.4 Compared of the horizontal displacement results

图5 水平向前方向位移绝对误差Fig.5 Absolute error of horizontal displacement
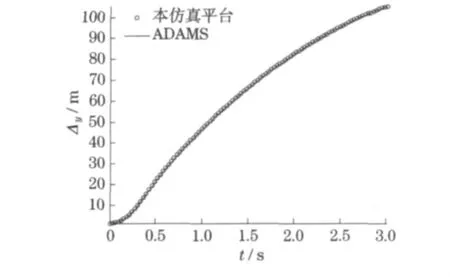
图6 竖直方向位移仿真分析结果对比Fig.6 Compared of the vertical displacement results

图7 竖直方向位移绝对误差Fig.7 Absolute error of vertical displacement
由图4和图6中仿真结果曲线,得出本仿真平台和AMDAS的仿真结果趋势吻合,证明本仿真平台结果准确.对图5和图7中误差结果进行分析,得到其误差主要来源是:MATLAB软件和ADAMS软件在对微分方程求解时,初始值选取不同,导致计算不同步.排除误差影响因素的影响,其相对误差平均在1%以内.
4 结论及展望
(1)本文通过对全地面起重机结构的深入研究和分析,合理简化出其动力学模型,并推导其动力学微分代数方程.
(2)利用MATLAB数值分析软件,开发完成了对全地面起重机动力学仿真平台,并能够更有效地对全地面起重机进行动力学仿真.
(3)通过对此仿真平台进行验证,证明其结果正确可靠.
因此,可在此基础上进行深入的开发,添加液压系统和控制系统的仿真模块及有限元计算模块,将动力学结果作为有限元计算、控制系统优化液压系统仿真初始参数,建立更加全面复杂的全地面起重机的机电液联合仿真系统.
[1]史卫民,韩维,李辉青.基于 ADAMS/Aircraft的舰载机逃逸性能分析[J].海军航空工程学院学报,2010,25(5):481-484.SHI Weimin,HAN Wei,LI Huiqing.The carrier-based aircraft bolter analysis based on ADAMS/Aircraft[J].Journal of Naval Aeronautical and Astronautical University,2010,25(5):481-484.
[2]孙建锐,徐长生.基于刚柔耦合模型的门座起重机动力学仿真研究[D].武汉:武汉理工大学,2010.SUN Jianrui,XU Changsheng.Research on dynamic simulation of the portal crane based on rigid-flexible mutiply model[D].Wuhan:Wuhan University of Technology,2010.
[3]朱雨童,王江云,韩亮.复杂航天器虚拟样机模型描述与集成[J].计算机集成制造系统,2010,6(11):2363-2368.ZHU Yutong,WANG Jiangyun,HAN Liang.Description and integration of complex spacecraft virtual prototype model[J].Computer Integrated Manufacturing Systems,2010,6(11):2363-2368.
[4]洪嘉振.计算多体动力学[M].北京:高等教育出版社,2003.HONG Jiazhen.Computational dynamics of mutibody systems.[M].Beijing:Higher Education Press,2003.
[5]夏鸿建,陈立平,王波兴.机械系统虚拟样机平台建模技术与动力学求解研究[D].武汉:武汉华中科技大学,2008.XIA Hongjian,CHEN Liping,WANG Boxing.Research on modeling and dynamic numerical solution of mechanism system virtual prototyping platform[D].Wuhan:Huazhong University of Science,2008.
[6]陈礼,齐朝辉.滑雪运动生物力学仿真分析[D].大连:大连理工大学,2009.CHEN Li,QI Zhaohui.The biomechanical simulation of skiing movement[D].Dalian:Dalian University of Technology,2009.
[7]齐朝辉.多体系统动力学[M].北京:科学出版社,2008.QI Zhaohui.Dynamics of mutibody systems[M].Beijing:Science Press,2008.
[8]王波兴,堵云竹,张卫国,等.复杂机械系统的多体动力学参数化建模技术研究[J].机床与液压,2007,35(4):201-205.WANG Boxing,DU Yunzhu,ZHANG Weiguo,et al.Parametric modeling in complicated mechanical dynamic system[J].Machine Tool & Hydraulics,2007,35(4):201-205.
[9]夏鸿建,王波兴,陈立平.多体系统仿真分析平台子系统建模技术[J].计算机辅助设计与图形分析学学报,2007,19(9):1206-1211.XIA Hongjian,WANG Boxing,CHEN Liping.Subsystem modeling technique on simulation platform of multi-body system[J].Journal of Computer-Aided Design & Computer Graphics,2007,19(9):1206-1211.
[10]夏鸿建,王波兴,陈立平.多体系统仿真分析平台参数化建模技术研究[J].计算机集成制造系统,2007,13(8):1511-1518.XIA Hongjian,WANG Boxing,CHEN Liping.Parametric modeling technique for multi-body system simulation platform[J].Computer Integrated Manufacturing Systems,2007,13(8):1511-1518.