液压软管卷盘的控制策略及安全监控系统设计
2011-03-16李万莉余清福薛红梅
李万莉,余清福,薛红梅
(同济大学 机械工程学院,上海 201804)
液压软管卷盘是为地下连续墙施工装置的液压系统提供液压油源的重要部件,液压软管一端缠绕在臂架上的卷盘中,另一端与施工装置相连.卷盘由电动机驱动.这种驱动是单向驱动,产生始终要收紧的趋势.当施工装置向上时,卷盘趁势收紧,当施工装置向下运动时,将强制带动软管向下运动,但此时卷盘马达仍试图收紧,因此产生1个张力,可以防止软管松弛.为防止液压软管被拉断,在系统中设置溢流阀.当电动机压力过高以致溢流阀打开.软管受到的拉力由溢流阀的设定压力控制,也取决于软管在卷盘上的作用半径.这个拉力不能太大,以防止软管被拉断或受损.但这个拉力也不能太小,至少不能被软管的悬垂段的重力拉下去.目前,有相当一部分产品未能很好地解决这个问题,这也是施工装置启闭油管(软管)无法随着施工装置的提升自动绕回卷盘,成为施工中最常见故障的最主要原因之一[1].本文正是针对这一问题,研究连续墙设备在施工过程中软管卷盘受到的扭矩变化规律,以此规律为基础,设计安全软管卷盘监控系统.
1 软管卷盘随动系统工作原理
软管是将高压(30MPa)液压能传递给施工装置的通道,它要随施工装置深入到地下几十米,用以完成施工装置的开启和关闭动作.任意时刻都必须随施工装置同步升降,一旦与施工装置发生缠绕或与墙体发生磨擦而导致破损,后果将不堪设想.为此设计了随动系统.图1为液压软管卷绕系统,图2为软管随动系统液压图.图中A1,A2为卷盘电动机进油口,B1,B2为卷盘电动机回油口,C1,C2为卷盘刹车装置进油口,P为卷盘驱动系统供油口,T为卷盘驱动系统回油口,P1为卷盘刹车系统供油口,T1为卷盘刹车系统回油口,S为电动机泄漏油回油口.该系统通过液压电动机给卷盘施以适时变化的合适拉力,使软管始终处于拉紧状态的同时,且拉力不会太小,以免出现软管无法随着施工装置的提升自动绕回卷盘的故障,拉力也不会太大,以免损坏胶管,还可顾及装配和柴油机启动要求.

图1 液压软管卷绕系统Fig.1 Hose winch

图2 软管随动系统液压图Fig.2 Hydraulic figure of hose servo system
2 软管拉力控制的数学模型
软管拉力控制就是通过实时设定油管卷盘的电比例溢流阀的压力值来实现的.先建立需施以油管卷盘的扭矩与软管绕出油管卷盘的角度的数学模型.
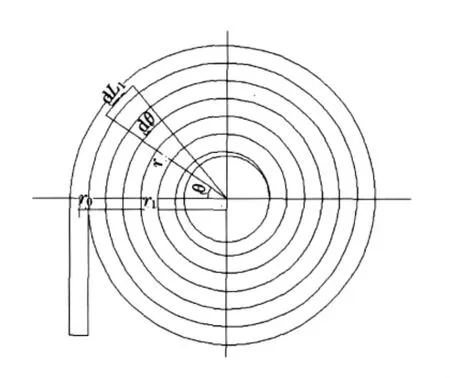
图3 液压软管的示意图Fig.3 Schematic of hydraulic hoses
液压软管示意见图3.软管是按阿基米得螺旋线绕在卷盘上的,每绕1rad的软管,卷盘有效扭矩半径增加r0/π,其中r0为软管半径.故软管绕出角度θ时,卷盘有效扭矩半径为

式中:r1为软管在软管卷盘相对于卷盘中心的最大半径,m.
由几何微分关系得:当卷盘绕出θ后,绕出卷盘的软管长度L1与卷盘绕出的角度θ之间的关系为
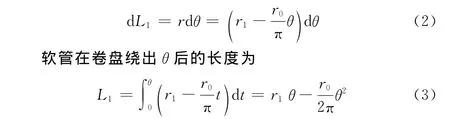
由几何关系可得施工装置的挖掘深度与软管绕出卷盘的长度大小相等,故施工装置的挖掘深度h与卷盘绕出的角度θ之间的关系为

由空间几何关系可得软管的垂直悬挂长度为

式中:L3为臂架长度,m;L0为施工装置的高度,m.
所以当卷盘绕出θ时,软管悬垂段施加到卷盘上的扭矩为


式中:G2为软管悬重段的重力,N;ρ为软管线密度,kg·m-1;g为重力加速度.
由空间几何关系可得θ和h的关系为

结合连续墙液压起重机的具体参数,使用MATLAB工具计算出软管悬垂段施加到卷盘上的扭矩M和施工装置的挖掘深度h的关系如图4所示.

图4 扭矩和施工装置的挖掘深度的关系Fig.4 Relationship between torque and digging depth of device
3 软管安全收放应满足的条件
工作过程中,软管需要保持张紧状态,卷盘受到的扭矩由液压马达产生的驱动扭矩抗衡.当施工装置主动下降时,软管端部势必随着下降,此时卷盘上受到的扭矩急剧增大,为了防止软管拉断,必须限制液压马达能产生的驱动扭矩.液压马达能产生的驱动扭矩受其比例溢流阀的设定值控制.如何结合实际的施工装置深度值,动态地改变比例溢流阀的设定值以维持软管张紧的同时不被拉断,是软管拉力控制的主要内容.根据卷盘受到的扭矩和施工装置的挖掘位置之间的公式,可以作为软管收放控制系统算法设计的基础.
4 安全监控系统设计
液压软管卷盘安全监控系统硬件由EPEC2024控制器、TTC vision Control控制器、显示面板、计深编码器、臂架倾角传感器、油管卷盘电比例溢流阀和CAN总线组成[2].
EPEC2024控制器单元是液压软管卷盘安全监控系统的核心,实时对计深编码器和臂架倾角传感器信号进行采样,经过运算输出油管卷盘电比例溢流阀的设定值,控制器每10ms运行1遍程序,从而实时设定油管卷盘的电比例溢流阀的压力值.
油管卷盘电比例溢流阀将其实际电流值反馈回EPEC2024控制器,控制器再将该值发送至CAN总线上,然后由TTC vision Control控制器将其接收下来,并输出到显示屏上显示,实现对油管卷盘电比例溢流阀的实时监控.系统各硬件的组织结构如图5所示.
液压软管安全监控系统程序包括EPEC2024模块程序和TTC vision Control模块程序,EPEC2024模块程序负责实时设定油管卷盘的电比例溢流阀的压力值并将电比例溢流阀的电流反馈值发送至CAN上,其程序流程如图6所示.TTC vision Control模块程序,负责接收来自CAN上的管卷盘的电比例溢流阀电流反馈值,并显示至显示屏上,其程序流程图如图6所示.

图5 液压软管卷盘安全监控系统硬件结构Fig.5 Hardware structure of safety supervisory control system

图6 液压软管安全监控系统程序流程图Fig.6 Flow chart of the safety supervisory control system
通过装机试验及上海虹桥交通枢纽工程、天津地铁文化宫站等施工现场验证,该智能控制系统达到了施工安全性要求.
5 结语
本文以地下连续墙液压施工设备为研究对象,对液压软管的收放控制中要解决的主要技术难题进行研究,提出了控制策略中的算法应遵循的基础公式.根据此控制策略设计的液压软管卷盘监控系统,成功地解决了以往此类设备中存在的软管不能安全收放的问题.
[1]嘉红霞,李万莉,余浩杰.地下连续墙液压抓斗纠偏系统动态分析与建模[J].同济大学学报:自然科学版,2009,37(10):1393-1397.JIA Hongxia,LI Wanli,YU Haojie.Dynamic analysis and model of underground diaphragm wall hydraulic grab control system[J].Journal of Tongji University:Natural Science,2009,37(10):1393-1397.
[2]游张平,来磊,李万莉.基于CAN总线的连续墙液压抓斗起重机安全报警系统设计[J].中国工程机械学报,2009,7(2):171-174.YOU Zhangping,LAI Lei,LI Wanli.Safety alarm system design for diaphragm-wall grab based on CAN bus[J].Chinese Journal of Construction Machinery,2009,7(2):171-174.