高处作业平台安全锁试验台控制系统研究
2011-03-14陈士忠江雪晨喻惠业吴玉厚
郭 桦,陈士忠,江雪晨,喻惠业,吴玉厚
(1.沈阳工程学院,辽宁沈阳 110136;2.沈阳建筑大学,辽宁 沈阳 110168;3.无锡申锡建筑机械有限公司,江苏 无锡 214101)
随着建筑行业的发展,高处作业吊篮以其结构紧凑、拆装方便、使用灵活等优点得到了广泛应用.它是建筑外墙装修、清洗和维护作业不可缺少的载人设备,其工作特点是人员在空中悬挂的吊篮中进行升降和作业,属于高度危险作业[1].在建筑外墙装修施工中,由高处作业吊篮引发的人员伤亡事故时有发生,所以其安全性受到高度重视[2-3].安全锁是吊篮悬挂平台的安全保护装置.当工作钢丝绳断裂或者吊篮悬挂平台严重倾斜时,安全锁能够自动快速地锁紧钢丝绳,从而保证操作人员的人身安全.为了避免由于安全锁性能缺陷而引起的坠落事故,必须研究有效的检测装置,以便快速、准确、科学地检测安全锁的各项性能指标.目前国内吊篮安全锁性能检测手段仍是手工操作方法,检测精度差,操作繁琐,而且需要2套设备分别对离心式和摆臂式这2种不同类型的安全锁进行检测.文献[1,2]提出了利用高速传感器和高速采集器实现数据采集,用专用软件和计算机处理数据,设计了新型的高空作业吊篮检测试验台,但设备成本较高,不利于商业化;文献[3]提出了基于89S52单片机的安全锁质量检测装置,设计成本大大降低,但功能不够全面.
本文在文献[2]的基础上以PIC16F877A单片机为核心,设计了新型吊篮安全锁试验台控制系统.应用该系统可实现检测过程的自动化和对吊篮安全锁的静置位移、锁绳角度、自由坠落时的锁绳制动距离和安全钢丝绳瞬间冲击力等的性能指标的实时显示和打印输出.
1 控制系统设计
1.1 系统原理
根据结构原理的不同,安全锁分为摆臂式与离心式2种类型,按照国家标准要求,这2种安全锁需要测试的性能是不同的,因此控制系统分为摆臂式检测模式和离心式检测模式.控制系统原理框图如图1所示.通过按键设定检测模式,单片机首先自动调平悬挂平台,按下“检测开始”按键,检测开始,通过现场传感器将角度和拉力信号转换为相应的电信号,送入单片机进行处理,通过并行方式单片机将处理后的信号发送到液晶显示器上实时显示.检测结束后,检测结果传送到给微型打印机打印输出.

图1 控制系统原理框图Fig.1 Control principle block
1.2 单片机选择
选择高效可靠的控制单片机将使控制系统的硬件电路简单可靠,软件编制方便,系统整体性能得以提高.本文选择性价比较高的PIC16F877A单片机为控制核心,PIC16F877A拥有8 kB×14位的FLASH存储器,采用独特的哈佛总线结构,数据总线和指令总线分离,指令精简,执行速度快,在线编程方便可调;I/O端口驱动能力强,可以直接驱动LED显示器,固态继电器等,还具有8通道的10位AD转换端口[4~7],如A端口除RA4口外的5个I/O与E端口.
2 控制系统硬件设计
由于采用了单片机作为主控制单元,大部分工作都由单片机在软件中实现,从而简化了硬件电路的设计.硬件电路主要由信号采集电路、液晶显示电路、通信接口电路和电机驱动电路组成.
2.1 信号采集电路
信号采集电路的作用主要是拾取角度、拉力信号,并将信号送入PIC16F877A单片机RA0与RA1口.为了能够在极短时间内对安全锁高速下落过程中的各种动态信号进行准确采集和实时分析,传感器系统需要较高的灵敏度.

图2 角度传感器测量电路Fig.2 Testing circuit of angle sensor
选用SCA61T单轴倾角传感器采集角度信号.SCA61T单轴倾角传感器长期稳定性好,温度特性优良,抗冲击能力强,用它组成的测量角度系统具有线路简单、体积小的特点.角度传感器测量电路如图2所示.其中 SCK为时钟控制线,MISO为主机进从机出,MOSI为主机出从机进,GND为接地,CSB为芯片选择输入,ST为自检输入,OUT为模拟输出,VDD为电源.
选用RSS02称重传感器采集拉力信号.拉力传感器内部有应变片,如果发生形变将会改变电阻值.将这个应变片置于1个电阻桥式电路中,外加一定电压,当发生形变时,在桥式电路的节点上便会产生电压的变化.电压的变化比较微弱,所以要经过变送器滤波放大成0~5 V.
2.2 液晶显示电路
基于PIC16F877A单片机的ST7920液晶显示控制,电路原理结构简单明了.根据ST7920液晶显示器的原理和引脚特性,采用PORTD端口与ST7920的数据端口相连,将RE0,RE1,RE2与ST7920的E,R/W,RS端口相连,其控制电路原理图如图3所示.

图3 PIC16F877A与ST7920液晶电气原理图Fig.3 Electrical principle diagram of PIC16F877A connecting to ST7920 LCD
图3中,RE0/RD/AN5为RE0/并行口读出控制端/第5路模拟信号输入端;RE1/WR/AN6为RE1/并行口写入控制端/第6路模拟信号输入端;RE2/CS/AN7为RE2/并行口片选控制端/第7路模拟信号输入端;RD0~RD7为数据传送端口;VSS为电源地;VDD为电源输入正;Vo为LCD驱动电源输入端.
RS并行模式时,高电平:数据;低电平:命令.RS串行模式时,为芯片使能端,高有效.
R/W并行模式时,高电平:读;低电平:写.R/W串行模式时,串行数据端.
E并行模式时,LCD读写信号起始端;E串行模式时,串行时钟端.
D0~D7为数据位;L-灯的负极,L+灯的正极.
2.3 通信接口电路
采用RD-DH48打印机打印检测结果,RDDH48打印机支持并行和串行2种接口方式与单片机相连,可通过改变打印机控制板上的串并口控制块来选择通信方式,本文选择串行接口方式.RD-DH48打印机的串口与 RS232标准兼容,其接口插座为DIC5线插座.检测结果通过单片机TX,RX引脚经MAX232转换为PS232电平向打印机传送,硬件组成如图4所示.

图4 串行接口电气原理图Fig.4 Electrical principle diagram of serial interface
2.4 电机驱动及警示电路
为防止交流电对单片机的干扰,本文采用固态继电器代替传统光电耦合器隔离.由于电机需要正反转,使用2个固态继电器G1,G2,用单片机RC1,RC2口控制电机正反转.当正转时,RC1端口输出高电平,经ULN2003电路反相放大后,吸合G1,接通电机电源,电动机正转;反之则反转.警示电路由固态继电器G3,G4及红、绿灯组成.当试验台准备就绪,RB2端口输出高电平,经 ULN2003电路反相放大后,吸合G3,绿灯亮,提醒工作人员此时可开始进行安全锁检测;红灯亮则表明检测到不合格安全锁产品,由RB1端口控制.RV为压敏电阻,防止固态继电器吸合瞬间感应电压超过继电器最大耐压而损坏继电器.
3 控制系统软件设计
软件是该控制系统核心,除了一些自锁和保护功能通过硬件实现外,大部分功能均通过软件实现,整个软件采用C语言模块化编程方式[8],易于系统的集成和二次开发.
安全锁分为摆臂式安全锁和离心式安全锁,由于这2种安全锁需要测试的内容是不同的,所以控制系统软件分为摆臂式检测模块和离心式摆臂模块2部分.摆臂式检测模块又分为安全锁锁绳角度测试模块、安全锁静置滑移量测试模块和安全钢丝绳瞬间冲击力测试模块;离心式检测模块又分为安全锁静置滑移量测试模块、锁绳距离测试模块和安全钢丝绳瞬间冲击力测试模块.控制系统具有实时显示安全锁性能指标功能及检测报告生成功能,可以根据各个模块的测试数据生成安全锁测试报告.安全锁试验台控制系统程序流程图如图5所示.
4 结论
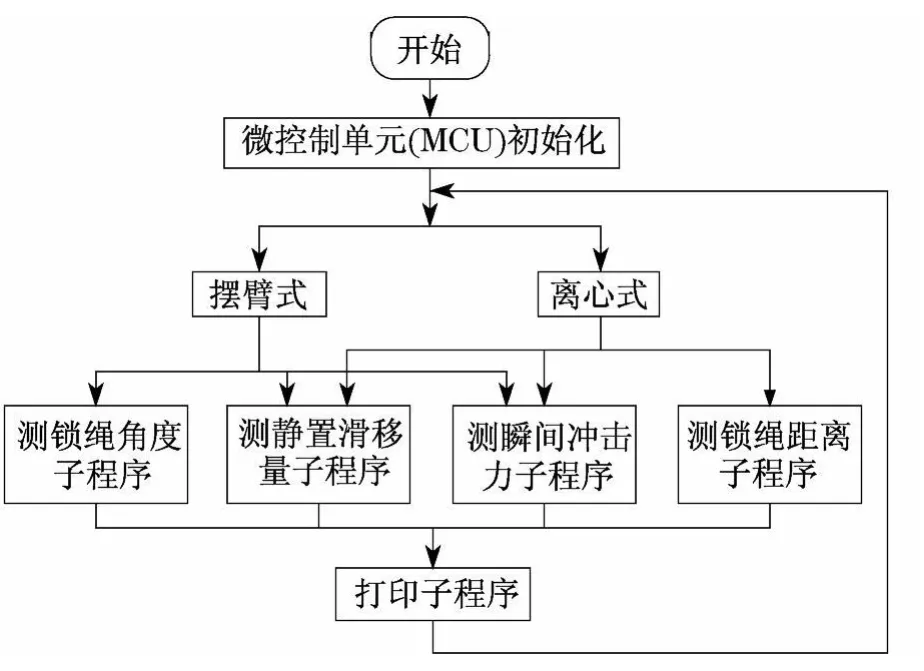
图5 控制系统程序流程图Fig.5 Program flow chart
本文基于PIC16F877A单片机为控制核心,设计了1种新型高处作业吊篮安全锁试验台控制系统,从硬件角度看,PIC16F877A单片机自带AD转换器,无需外加AD转换电路,简化了硬件电路设计;在软件方面,采用C语言模块化编程方式,简洁紧凑、灵活方便,易于系统的集成和二次开发.控制系统大部分功能均通过软件实现,减少了检测过程中的硬件设备,可满足摆臂式安全锁和离心式安全锁的不同特点,在1台设备上实现对这2种类型安全锁性能参数的自动检测,降低检测设备的成本.
[1]张华文,张金生,朱宪臣.新型高处作业吊篮安全锁试验装置[J].建筑机械,2007(8):90-92.ZHANG Huawen,ZHANG Jinsheng,ZHU Xianchen.Testing device for safety lock for suspended powered platforms for work at heights[J].Construction Machinery,2007(8):90-92.
[2]刘卉,刘剑,吕洪玉.吊篮安全锁检测试验台智能测试分析[J].起重运输机械,2007(7):77-79.LIU Hui,LIU Jian,LV Hongyu.Aerial lifting basket safety lock testing system[J].Hoisting and Conveying Machinery,2007(7):77-79.
[3]汤艳坤,董兴文,李井泉.基于89S52单片机的安全锁质量检测装置设计[J].电脑编程技巧与维护,2009(1):59-60.TANG Yinkun,DONG Xingwen,LI Jingquan.Design of lock test instrument based on 89S52 singlechio[J].Computer Programming Skills Maintenance,2007(8):90-92.
[4]王建平,袁胜臣,徐晓东.基于PIC16F877A单片机的车控系统[J].仪器仪表用户,2007,14(2):33-34.WANG Jianping,YUAN Shengchen,XU Xiaodong.The vehicle control system of missile based on PIC16F877A[J].Electronic Instrumentation Customer,2007,14(2):33-34.
[5]王正彦,臧宏文.基于PIC单片机的A/D变换器的设计与实现[J].电子测量与仪器学报,2004(2):86-91.WANG Zhengyan,ZANG Hongwen.Design and implementation of A/D conversion based on PIC microcontroller[J].Journal of Electronic Measurement and Instrument,2004(2):86-91.
[6]林忠波,马朝勇,姚政,等.基于PIC单片机的便携式气体测漏仪[J].电子测量技术,2010(2):79-82.LIN Zhongbo,M A Chaoy ong,YAO Zheng,et al.Portable air-tightproerty detector based on PIC single-chip[J].Electronic Measurement Technology,2010(2):79-82.
[7]Michrochip Technology Inc.PIC16F87XA data sheet[M].Chandler:Michrochip Technology Company,2003.
[8]伍春生,刘四洋,彭燕昌,等.基于PIC16F877A自动太阳跟踪器的设计[J].现代电子技术,2007(20):147-149.WU Chunsheng,LIU Siyang,PENG Yanchang,et al.Design of automatic sun trackers based on PIC16F877A[J].Modern Electronics Technique,2007(20):147-149.
