小型挖掘机工作装置三维建模及有限元分析
2011-03-14王建军冯光金占必红易靖宇
王建军,冯光金,占必红,易靖宇
(华侨大学 机电及自动化学院,福建 厦门 361021)
1 掘机工作装置在Pro/Engineer中的三维建模
1.1 挖掘机工作装置的设计图纸分析
在了解了挖掘机工作装置的结构特点和工作原理之后,对某国产小型液压挖掘机工作装置的设计图纸进行分析和研究,包括各零件的尺寸、装配关系,并且针对不同零件采取不同的建模手段.整个工作装置的建模在设计图纸的基础上,主要由动臂、斗杆、铲斗、油缸等组成.
拟在Pro/Engineer软件中进行三维建模,主要包括以下内容:
(1)对外形比较规范的零部件采用常规的拉伸、旋转、扫描等方式进行建模,尺寸严格遵守设计图纸的要求.
(2)对外形不便于在标准模块下进行建模的,例如铲斗底板及加强板则需要在钣金模块下进行建模,以保证模型与图纸要求相对应.
(3)装配时根据设计图纸要求的位置和Pro/Engineer中装配模块提供的装配功能,借助基准面、基准轴和基准点的辅助,将各零部件完全约束.
(4)拟采用在需要用销轴铰链连接的部分用销钉连接方式,油缸中活塞的约束方式则采用圆柱约束,同时还需要对连接机构进行行程设置,以保证各组件有正确的运动位置.
1.2 挖掘机工作装置的三维建模
在对挖掘机工作装置的设计图纸分析了解之后,就正式对挖掘机工作装置进行三维建模.在实际建模的过程中,除去部分标准件可以利用Pro/E外挂程序进行直接导入和装配之外,其他大部分零件都需要根据实际图纸进行建模.
在建模的过程中利用Pro/Engineer软件提供的不同模块和不同建模方式进行三维实体或者钣金建模,其中利用最多的是拉伸,同时配合打孔、倒角、扫描等造型方式对各零部件进行建模.

图1 工作装置三维实体模型Fig.1 3D solid models of working device
在对各零部件建模完之后,将根据设计图纸要求进行实体虚拟装配.根据设计图纸中不同位置的约束要求,采用不同的约束方式进行装配.在一级部件装配完成之后,根据设计图纸要求以及工作装置的结构特点和工作原理,采用结构连接方式进行约束,最终实现组件在增加动力之后可以实现虚拟运动.
对零件进行三维建模和虚拟装配后得到的工作装置如图1所示.
在各级组件装配完成之后,为了让虚拟组件与实际组件更加相似,在每个组件装配完成之后再进入焊接模块,根据设计图纸要求为需要增加焊缝的地方添加焊缝.
2 挖掘机工作装置的受力分析
计算工况和计算位置的选择原则上是使主梁上可能产生最大的弯矩时的作业姿态,主要选择下面2个工况[1]:
(1)工况1:最大挖掘机深度时铲斗挖掘、铲斗液压缸发挥最大挖掘力.
(2)工况2:稳定计算位置之一,使挖掘机可能向前倾翻、稳定系数最小时的位置.一般可取动臂上铰点和下铰点连线处于水平位置,斗杆2个铰点处于垂直位置,铲斗挖掘为垂直方向.
2.1 工况1
工作装置在工况1的工作位置如图2所示.
图2中W1为挖掘力切向分力;LA1为铲斗油缸作用力臂;LB1为摇杆的作用力臂;LC1为连杆的作用力臂;r11为铲斗与斗杆铰点的作用力臂;r12为斗杆油缸闭锁时,挖掘力的作用力臂;r13为动臂油缸闭锁时,挖掘力的作用力臂;LE1为斗杆油缸作用力臂 ;LF1为动臂油缸作用力臂;FA1为动臂油缸压力最大时,油缸铰点的作用力;FB1为动臂铰点的作用力;α1为动臂铰点的作用力与水平方向的夹角;β1为臂动臂油缸与水平方向的夹角.
液压挖掘机反铲装置工作时既可用铲斗液压缸挖掘(简称转斗挖掘),也可单独用斗杆液压缸进行挖掘(简称斗杆挖掘),或作复合动作挖掘.一般斗容小于0.5 m3或在土质松软时以转斗挖掘为主,反之则以斗杆挖掘为主.挖掘力可分为切向分力W1和法向分力W2,试验表明法向挖掘阻力W2的指向是可变的,数值也较小,一般W2=0~0.2W1.土质越均匀,W2越小.从随机统计的角度看,取法向分力W2为零,简化计算是允许的[2].
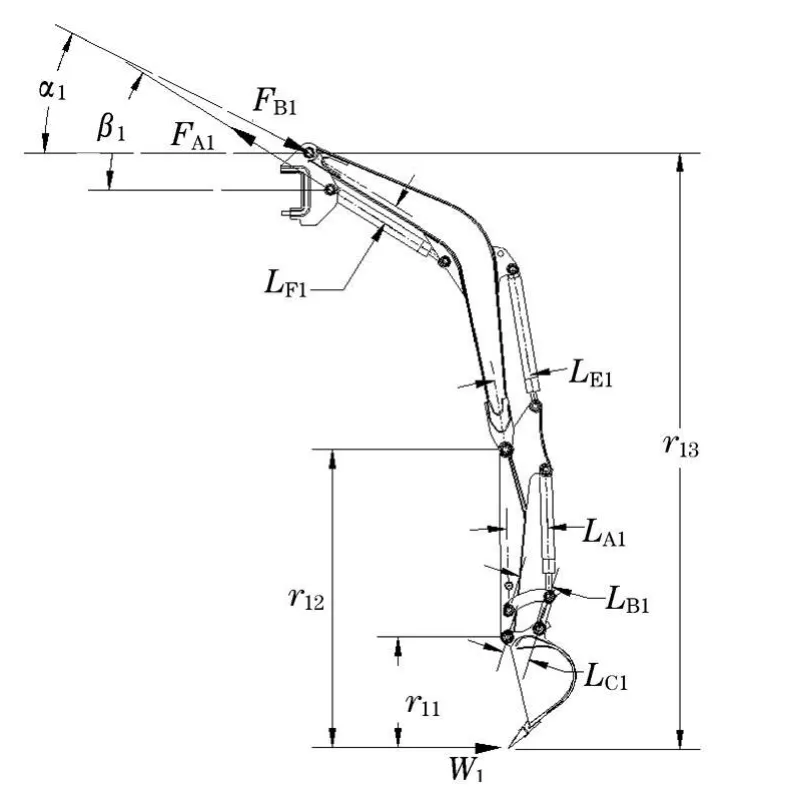
图2 工况1的受力情况Fig.2 Manipulator's force model of work state 1
工作装置各油缸作用力有以下2种情况:
(1)当油缸2空腔分别接高低压油路时产生推动机构进行运动的作用力称为主动作用力(简称作用力或者工作力),其最大值取决于该油缸回路的工作压力和油缸直径.
(2)工作装置工作时作用于闭锁状态(即油缸2腔与高低压油路断开)的油缸上的作用力称为被动作用力,其最大值则取决于该油缸油路的过载溢流阀压力和承载活塞面积.当油缸工作力大于外载荷的作用力的时候,该油缸便无回缩现象,否则由于过载溢流阀打开而溢流,便使油缸发生回缩.
在保证整机稳定的情况下,主动液压缸产生的最大挖掘力只有同时小于动臂液压缸、斗杆液压缸闭锁所限制的最大挖掘阻力时才能实现,否则,挖掘力相应于以上3个值中的最小值[2].
工况1的工作位置如图2所示.在Pro/Engineer软件中建立的三维模型中分析可得,此时工作装置的重心与动臂铰点的水平距离为LG11=781.82mm,工作装置的总质量为m1=202.1 kg,动臂与斗杆的铰点以下的工作装置的质量为m2=90.62 kg,重心到动臂与斗杆的铰点水平距离为LG12=142.375mm.动臂油缸、斗杆油缸及铲斗油缸的参数见表1.动臂油缸、斗杆油缸在被动状态下的抗拉能力取决于其小腔闭锁力,抗压能力取决于其大腔闭锁力.
根据计算式(1)可求得抗拉、抗压情况下能承受的最大挖掘阻力为

式中:F为油缸产生的最大的力;pi为工作装置过载溢流阀设定压力;A为工作腔的面积.

表1 液压油缸参数Tab.1 Parameters of hydro-cylinder

式中:F1为铲斗油缸产生的最大的力.

式中:F2为斗杆油缸抗压时产生最大的力.

式中:F3为动臂油缸抗拉时产生最大的力.
由以上可知,动臂油缸承受的最大挖掘力最小,故工况1的挖掘力W1==1426.3 N;由于此时动臂油缸压力最大,油缸铰点的作用力为FA1=F3=26389.4 N.
工作装置在动臂铰点的力平衡方程为

式中 :β1=31.89°.由式(5)可得:FB1=24128.94 N,α1=29.6°.
2.2 工况2
工况2工作位置如图3所示,此时斗杆油缸、动臂油缸均抗压.和工况1类似,可以求得:FB2=32135.5 N,α2=32.8°.
图3中,W2为挖掘力切向分力;FB2为动臂铰点的作用力;α2为动臂铰点的作用力与水平方向的夹角;β2为臂动臂油缸与水平方向的夹角.
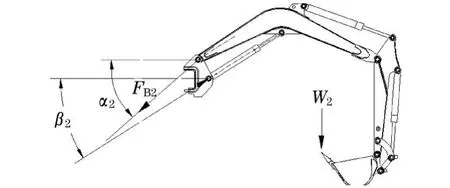
图3 工况2的受力图Fig.3 Manipulator's force model of work state 2
3 动臂的应力和变形分析
3.1 动臂的结构简化
进行有限元分析之前,首先就是模型结构的简化,即考虑主要因素,忽略次要因素,从而建立起适合于有限元分析的力学模型.1个好的力学模型应该满足以下2条:
(1)模型能基本反映所要分析的结构的真实受力状态,分析计算结果能满足实际工程需要.
(2)模型考虑因素尽量少,研究对象简单,以便降低有限元分析时的时间和工作量.
根据受力状态,对称和反对称等原理,在保证受力状态基本不变的前提下,尽量简化要分析的结构,达到降低计算工作量、减少数据处理的目的.在本文的动臂结构中,载荷和约束都是不对称的,所以只能对整个动臂进行分析.
建立准确而可靠的有限元模型,是一项非常重要的步骤,直接关系到计算的结果是否准确.而实际的工程结构非常复杂,支承边界形式多样,载荷也不断变化,因此在建立计算模型时要作必要的简化.对于动臂结构在理想化模型中主要做如下简化:
(1)不考虑钢板焊接应力及焊缝形式的影响,处理各个零件的连接,连接处的一些细小特征很容易造成不能成功划分网格的问题.
(2)建立模型时,简化贴板、固定板、保护套等零件,这些细小的结构对动臂整体的强度、刚度影响都很小,可以不考虑,以节省时间和资源;将2对支撑板分别简化为一体,这2对支撑板在应力分析中没有多少影响,不作为受力点.
(3)将动臂的上下底板、2个侧板、连接板、封板和后轴套设计为一体,建模成为1个零件.
3.2 动臂的受力分析
在做应力分析之前,首先应该对动臂进行受力分析,以求解出动臂下铰点的受力情况,才能够对动臂进行应力分析.
根据前述对工况1的受力分析,在对模型简化之后模型的受力如图4所示.在Pro/Engineer中测得动臂质量为52.43 kg.
在考虑重力的情况下,由油缸的力以及第2节分析结果,求解动臂在工况1下的受力分析,如下:工况1:

工况2的受力如图5所示.工况2:

3.3 动臂的应力分析和变形分析
在对动臂进行结构简化和受力分析之后,进入Pro/Engineer软件中的有限元分析模块(Mechanica模块),对动臂简化零件进行静力的应力分析和变形分析.
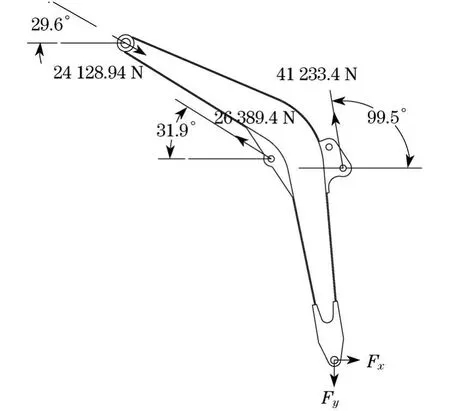
图4 工况1的动臂受力图Fig.4 Boom's force model of work state 1
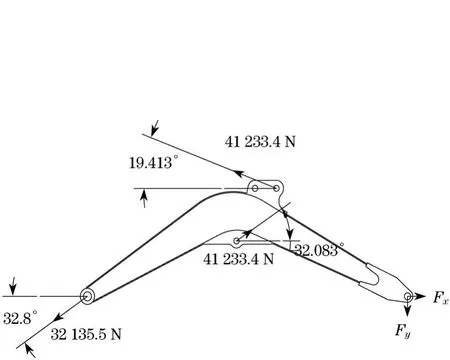
图5 工况2的动臂受力图Fig.5 Boom's force model of work state 2
本文所用到的有限元分析是Pro/Engineer软件兼容模式下的Mechanica模块,在模块中软件会自动将零件划分网格,如图6所示.
在进入有限元分析模块之后,分别根据软件要求对动臂简化零件进行材料设置以及材料分配,在允许的条件下选择材料库中的材料,也可以根据材料属性新建材料;同时对零件进行约束,采用1面2销的约束方式将零件完全约束,即约束动臂的上铰点、动臂油缸支撑板销孔和其中1个侧面,同时根据动臂下铰点的受力情况增加铰链载荷[3].
载荷加载完成之后运行有限元分析,软件提示运行完成之后查看分析结果.
根据有限元分析结果可看出,2种工作情况下最大应力值为179.6 MPa,出现在受力的铰链内表面,变形最大处位移为0.7646mm,出现在动臂下铰点的末端.在设计图纸中对零部件的材料要求为Q345A,即允许最大应力值为345 MPa,因此设计中材料的安全系数达到了1.927,能够满足使用要求;而变形量相对于动臂而言也只是很小的值,处于材料要求的范围内.
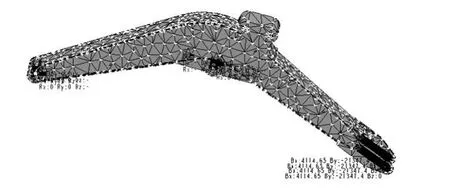
图6 工况1自动划分网格图Fig.6 Boom's f inite element model of work state 1
4 结语
本文通过使用Pro/Engineer对挖掘机工作装置进行三维建模和有限元强度和刚度分析,可看出有限元分析结果是可靠、合理的,同时说明该挖掘机的工作装置基本满足强度和刚度要求.有限元的分析结果为实际设计提供了有价值的参考,同时分析过程也为其他工程机械的设计分析提供了可行的方法和手段.
[1]陆军坊.挖掘机平台有限元分析及回转液压系统仿真[D].成都:西南交通大学,2008.LU Junfang.Finite element analysis and simulation of slewing hydraulic system on excavator[D].Chengdu:Southwest Jiaotong University,2008.
[2]天津工程机械研究所.单斗液压挖掘机[M].北京:中国建筑工业出版社,1977.Tianjin Reserch Institute of Construction Machinery.One bucket hydraulic excavator[M].Beijing:China Architecture&Building Press,1977.
[3]祝凌云,李斌.Pro/Engineer运动仿真和有限元分析[M].北京:人民邮电出版社,2004.ZHU Linyun,LI Bing.Pro/Engineer motion simulation and finite element analy sis[M].Beijing:Posts&Telecom Press of China,2004.
