牧草压捆机关键部件的仿真分析
2011-03-13周桂霞李剑李玉清张伟梁远
周桂霞,李剑,李玉清,张伟,梁远
(1.黑龙江八一农垦大学工程学院,大庆163319;2.黑龙江省三江管局洪河农场第五管理区)
近年来随着畜牧业的发展,资源成本相对较高的种植业面积会适当减少,使土地资源和农业生产结构向畜牧业、草业等方面调整,牧草生产和加工产业将面临新的机遇,但其收集、储运环节成为制约其产业化利用的主要因素。研究开发牧草压捆机是实现农业生物质产业化的前提之一。
由于农业机械的工作对象和环境的随机性、复杂性,传统设计方法已不能满足现代农机具的设计需求,因此采用现代设计方法,在现有牧草压缩理论基础上,应用UG软件对牧草打捆机的关键部件进行虚拟设计和动态仿真分析,可为重要结构参数的确定提供理论依据,从而缩短设计周期,降低物理样机的成本,提高企业竞争力[1-4]。
1 压捆机工作原理和性能分析
1.1 工作原理
压捆机的工作原理是用机械机构模拟人工打捆的工艺过程,完成牧草捡拾、压实和打捆过程。工作时,牧草通过输送喂入装置把牧草喂入到压缩室,在曲柄连杆机构作用下,活塞往复运动,把压缩室内的牧草压成草捆,打结后推向压缩室出口。
1.2 任意一点的位移分析[5-6]
为了简化分析,取X坐标轴与滑块运动轨迹重合,如图1所示。设曲柄长度为L1,其方位角为β,连接杆长度为L2,其方位角为θ,S为其轨迹矢量。闭环矢量方程数学表达式为S=L1+L2。如图建立坐标系,构造矢量封闭方程:
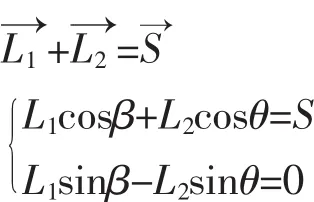
则
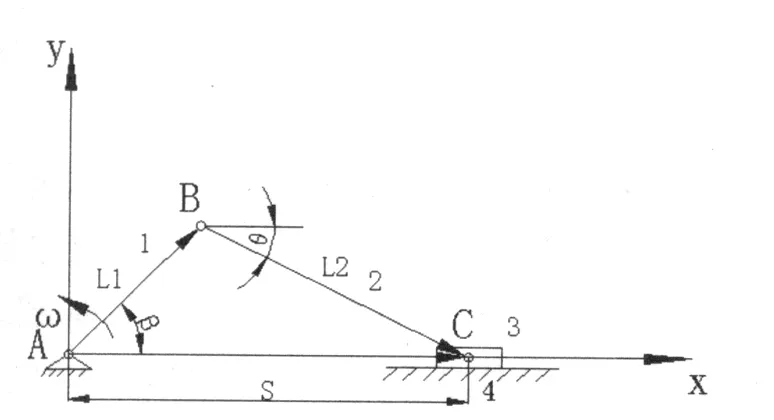
图1 压缩机构动力模型Fig.1 The dynamicmodel of compressmachine
图1所示为单一自由度的曲柄连杆机构模型。s、l1、l2分别代表活塞中心距曲柄回转中心距离、曲柄长度、连杆长度,β为曲轴转角,θ为连杆与活塞中心线的夹角。曲柄回转角速度ω2=θ′。
设活塞中心距曲柄回转中心距离、曲柄长度以及连杆长度分别用矢量S、L1、L2表示。
则它们之间的矢量关系可表述为S=L1+L2。如图建立坐标系,构造矢量封闭方程:

对式(2)方程两边进行求导后,得到曲柄连杆机构的运动学方程为:

为便于仿真分析,可将式(3)用矩阵形式表示为:

2 UG三维建模与装配
2.1 UG建模
UG软件是广泛应用于航空、船舶、汽车、兵器、机械工业、模具、工业设计、等产业的全新三维机械设计软件。它包括机械设计(CAD)模块、功能仿真(CAE)模块、制造(CAM)模块、模具设计模块、扳金等模块,能够实现实体与曲面设计、零件装配、二维工程图制作、机构运动仿真、有限元分析、钣金设计、模具设计、数控加工等功能。
基于UG建立的三维模型可以判断装配模型之间有无干涉,而且提供了各种运动分析,便于进行结构的自锁分析、结构件的运动干涉检查及机构运动的动画仿真,可及时发现设计中存在的问题并改进,缩短设计周期,降低设计成本,有利于新产品、新方案的设计,帮助机械设计设计人员更快、更准确、更有效率地将创新思想转变为市场产品,提高产品开发的成功率。
2.2 关键部件装配
首先根据零部件的结构特点,通过UG软件的拉伸、旋转、扫掠、阵列、复制和布尔和等工具条完成曲柄、连杆、滑块的三维参数化设计并建立零件库,为零件的修改和调整、虚拟装配、动力学分析、运动分析做准备。
装配时采用自下向上的方法,先定义各零件模型之间的装配约束,确定零件的装配顺序,将零件装配成部件,再生成压捆机关键部件装配体。通过渲染工具条对模型进行渲染,使实体模型达到逼真效果。最终得到打捆机关键部件装配图,如图2。
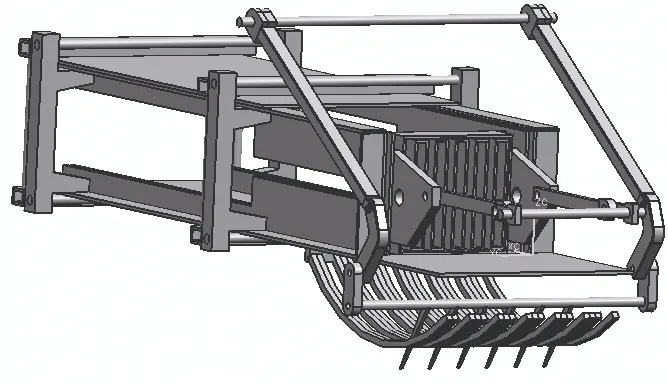
图2 压捆机关键部件装配Fig.2 Assembly of pasture pressbaler key parts
3 运动仿真
UG运动分析模块是一个模拟仿真分析的设计工具。既能进行运动学分析,又能进行动力学分析。通过UG机构运动仿真分析模块进行前处理,创建连杆、运动副和定义运动驱动,求解运动过程,生成内部数据文件,后处理,分析数据,将构件的位移、速度和加速度数据转换成动画、图表和报表文件。分析结果可用来指导修改结构设计,可在设计模式下直接修改模型参数,重复仿真分析,得到更合理的机构设计方案。
滑块位移变化图如图3,滑块加速度变化图如图4。
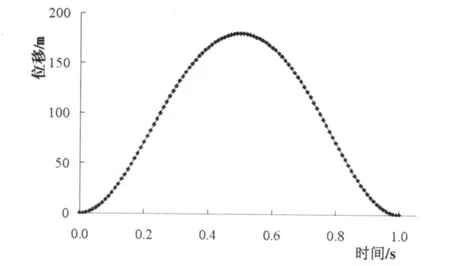
图3 位移曲线图Fig.3 Themap of displacement

图4 加速度变化图Fig.4 The variationalmap of acceleration
由仿真曲线可看出在曲柄活塞往复运动过程中,仿真量随着时间的变化呈周期性变化。压缩过程曲线的变化规律与所构建的数学模型相吻合,且动态响应性能良好。由活塞位置曲线可以看出,活塞在一个冲程内前极点和后极点位置坐标,圆整后可确定活塞的实际有效行程,为设计设定的有效行程提供参考依据。
4 干涉检验
压捆机的关键部件中,装填拨叉机构和压缩机构之间的配合运动能否成功运行是关键问题,如果发生干涉会损坏工作部件,使机器发生故障。因此,在压捆机关键部件装配和运动仿真的基础上,利用UG对实体模型进行干涉检验,包括特定装配结构形式下,装配体各个零件之间相对位置是否干涉的静态检查和运动过程中零部件之间的动态干涉,以生成干涉体表示。
对装配体进行干涉检验,观察和分析出现的干涉问题,对结构进行改进设计,将整机设计中可能存在的问题消除在萌芽状态,确保设计质量,减少试制样机费用和改进时间,缩短机械产品的更新周期。
5 结论
基于UG建立了压捆机关键部件直观、易于理解的三维模型,并进行了运动仿真分析,为牧草压捆机的设计、改进以及将来的样机制造奠定了基础。虽然整个过程不能完全代表关键部件的实际运动,但对于揭示关键部件的运动特点、检查设计参数的合理性与工作性能,提供了各种运动分析、结构的自锁分析、结构件的运动干涉检查以及机构运动的动画仿真,及时在参数化阶段发现问题与不足,缩短开发时间提高了产品设计质量和研发的成功率。
[1]Nagchaudhuri A.Mechatronic Redesign of Slider Crank Mechanism.Proceedings of IMECE 2002 ASME International Mechanical EngiNeering Congress & Exposition[M].New Orleans,Louisiana,2002.
[2]杨明韶,王春光.牧草压缩工程中几个主要问题分析[J].农业工程学报,1997(13):134-138.
[3]杨学军,李长荣.中国饲草打捆机市场分析与预测[J].农业机械,2002,5:12-13.
[4]曾杰,鲁东.计算机辅助设计(CAD)在农业机械中的应用及实践[J].中国农机化,2004(4):33-34.
[5]于建国,刘志杰,赵洪刚.饲草压捆机压缩机构动态仿真[J].东北林业大学学报,2004(2):68-70.
[6]刘志杰.饲草压捆机的设计及结构分析[D].哈尔滨:东北林业大学,2004.
[7]王德福,张全国.青贮稻秆圆捆打捆机的改进研究[J].农业工程学报,2007(11):168-171.
[8]于建国,赵洪刚.饲草压捆机喂入机构位置方程的建立及仿真[J].东北林业大学学报,2006(3):72-73.
