气动分置式斯特林制冷机被动减振技术研究
2011-02-26孙述泽闫春杰
孙述泽 闫春杰
(兰州物理研究所真空低温技术与物理重点实验室 兰州 730000)
1 引言
气动分置式斯特林制冷机与传统的牛津型双驱动斯特林制冷机相比没有膨胀机驱动电机,排出器的运动仅靠两端的压差、弹簧刚度和阻尼来实现。它具有结构简单紧凑、可靠性高、振动输出相对较小等优点,因而广泛应用于红外元器件、超导滤波器件等其他场合的冷却。但是由于高频运动部件和气体穿梭导致制冷机产生的振动干扰[1],会影响气动分置式斯特林制冷机在对振动要求比较苛刻的场合的使用,因此需要可靠的减振技术来减小制冷机的振动输出。国外纯气动式斯特林制冷机的被动减振技术研究的比较深入透彻,并且减振效果很明显。较为典型的是Ricor公司K535型制冷机,在未进行被动减振前振动输出达到14.8 Nrms;在制冷机使用动力吸振器后(K535-LV型)其振动仅为0.1 Nrms,已满足NASA对空间制冷机振动的要求;通过调节其中一个压缩机活塞的运动,可以得到更小的振动输出(K535-ULV型)[2],其性能可以满足对振动要求极其苛刻的HDM的使用。与传统的主动减振系统相比,被动减振系统具有结构简单、可靠性高、不耗电能等优点。并且如果在纯气动式斯特林制冷机中使用主动减振技术需要做很大的改动,会失去气动式斯特林制冷机的原来优点。因此在气动分置式斯特林制冷机中,被动减振技术具有无可替代的优点。
2 振动特性
制冷机的振动特性主要是指制冷机振动的幅值特性和频率特性,它与制冷机本身的固有属性和驱动力的属性有关,以及安装方式等有关,制冷机的振动特性直接影响着冷却对象的某些性能。通过分析制冷机的振动来源和制冷机本身的固有属性有助于深入的了解制冷机的振动特性,从而可以更好选取合适的振动控制方案。
2.1 振动来源
引起斯特林制冷机冷指振动的原因很多并且各种因素相互影响,主要有:压机活塞高频运动、排除器的运动、气体的交变流动和压力脉动以及环境等外界条件引入的振动等。总体上可以分为:机械振动与气动作用。气动式斯特林制冷机排出器的运动可以看作是弹簧振子系统在受到正弦作用力后受迫振动的模型[3]。根据振动力学可以知道,如果不考虑阻尼以及排出器等部件的非线性因素,振子输出的振动不平衡力为:

式中:Ff为制冷机的振动输出力,m为制冷机质量,ω为运行角频率,F为驱动力幅值,k弹簧刚度。从式(1)中可以看出其振子不平衡力与振子固有属性有关和驱动力有关,在一般情况下制冷机的运行频率与热力学因素等有关,在制冷机的工作过程中保持不变。而驱动力幅值与压缩机行程、死空间、压比、充气压力、阻尼等有关。
文献[4]中应用材料力学拉伸应变的观点,得出在仅考虑气体交变流动的情况下冷指的振动幅值为:

从式(1)和式(2)中可以看出通过改变制冷机的本身的特点,即减小冷指的半径和长度,增加冷指的厚度以及可以通过使用弹性模量较大的材料来减小制冷机的固有振动,但是到综合考虑制冷机的热力学循环其改动的余地不大。有受迫振动的特点知道制冷机冷指的振动在频域上表现为以驱动频率为基频的一系列离散谐波。大量试验表明制冷机的振动主要集中在300 Hz以内,并且一般情况下基频分量占80%以上。
式(1)、(2)给出了利用弹簧振子模型和悬臂梁模型在分别考虑机械运动和气体交变流动时制冷机冷指的振动幅值。通过适当的改变制冷机本身的几何参数可以有效的减小制冷机的振动输出,因此在制冷机的设计室应综合考虑热力学因素和振动、可加工性等条件,合理组织气体的流动,从而使制冷机的综合指标达到最佳。
2.2 冷指自然频率计算
冷指是直接与冷对对象相连接的,冷指的振动会直接影响冷却对象的工作性能。通过计算冷指的自然频率可以得到在一定的外界条件下冷指的振动响应。图1为冷指振动模型的示意图,由于一般情况下冷指为薄壁的悬臂梁结构,因此借助于梁模型的轴向与径向振动可以得到其振动的自然频率。
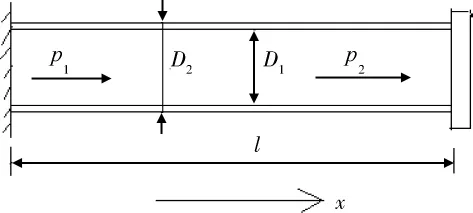
图1 冷指的振动模型示意图Fig.1 Schematics of vibration of cold finger
振动方程为:

式中:l为梁的长度,A为横截面积,ρ为材料密度,E为弹性模量,M为冷板的质量,f(x,t)为梁内的作用力和在x处的轴向位移[5]。
通过对以上方程的求解得到振动的频率方程:

式中:
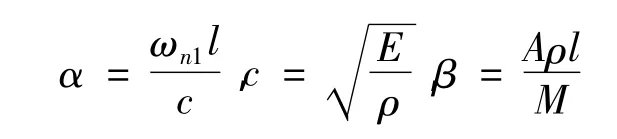
因此通过式(4),就可以得到其自然频率。考虑径向振动方程,通过边界条件可以得到径向振动的自然频率为
3 被动减振分析
3.1 动力吸振法
由于制冷机的工作频率范围较窄,一般情况下根据热力学因素选择最佳的频率,在工作的过程中保持不变,并且制冷机的振动以基频为主,因此动力吸振器的可以实现制冷机的减振。根据其示意图2,可以得到其系统的运动方程为:

图2 制冷机与平衡块运动示意图Fig.2 Cooler-balancer mass-spring system
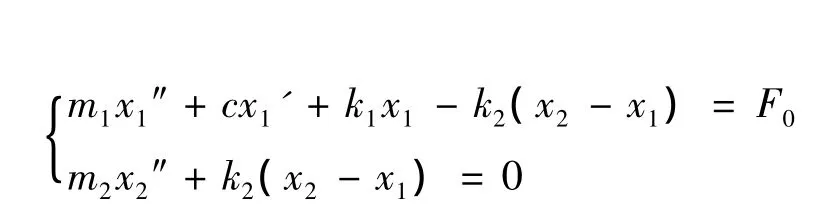
通过拉普拉斯变换后求解该方程组得到:
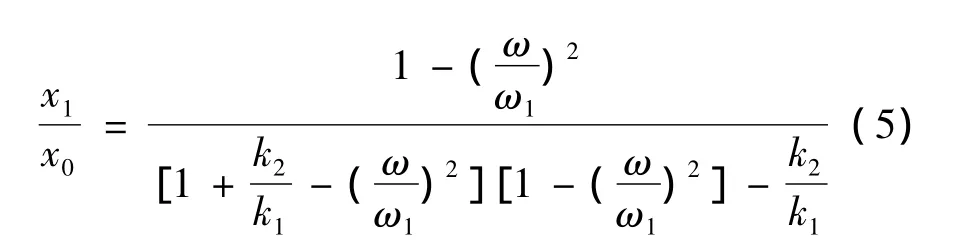
式中:x0为制冷机的静位移,ω为制冷机的工作频率。可以看出通过合理的设计平衡块的质量与刚度,即通过设计平衡块的自然频率与制冷机驱动频率相等时,在理论上可以使制冷机的振动不平衡力在基频分量上为0。由于基频分量占整个振动力的份额很大,因此动力吸振法的减振效果比较明显。在实际的减振系统中,动力平衡块可以在室温腔内部,作为制冷机的一个零件,整体设计和加工,此时减振系统主要是抵消由动力排出器运动带来的不平衡力,或者也可以安装在室温腔外部,此时主要是对冷指基频振动的减小。图3和图4分别是动力吸振器在安装室温腔内部和外部的示意图和实物图。
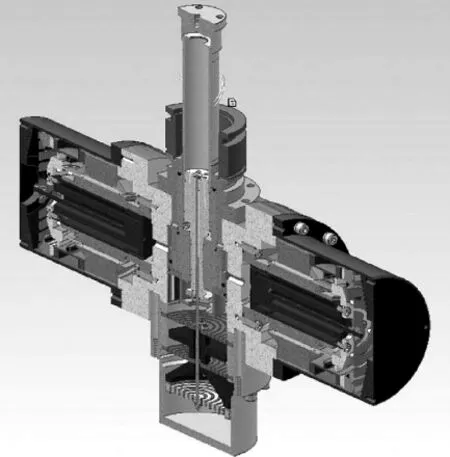
图3 动力吸振器示意图(内部安装)Fig.3 Schematics of dynamic absober

图4 动力吸振器实(外部安装)实物物图Fig.4 Dynamic absober in cryocooler
3.1.1 实验验证
在室温腔外部安装动力吸振器具有安装方便、拆卸方便、不影响斯特林制冷机内部结构等优点。考虑到现实条件,采取在室温腔外部安装动力吸振器减振。即就是在室温腔外部安装新的弹簧振子系统来进行减振。该振子系统的自然频率为50 Hz,为了防止因偏心等问题而影响减振效果,设计了动力吸振器运行的导轨。图5为动力吸振器统统的组装图。
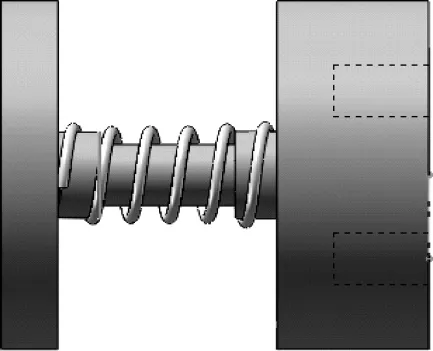
图5 动力吸振器装配图Fig.5 Assembley of dynamic absober
为了尽可能的接近实际应用条件,将制冷机约束后测冷指的振动。通过测试减振前后的振动指标来反映动力吸振器的减振情况。图6和图7为减振前和减振后的振动的幅频曲线,通过曲线可以看出动力吸振器可以有效的抑制制冷机的振动输出,尤其是抑制基频振动分量。
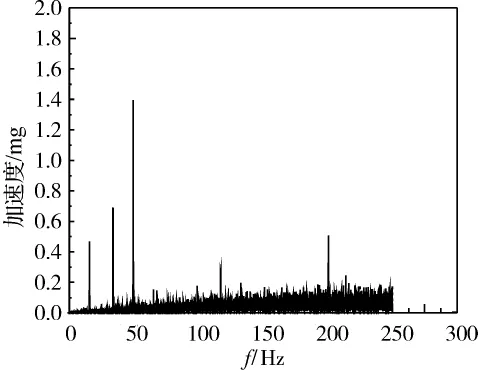
图6 减振前指标Fig.6 Vibration acceleration before using dynamic absobe
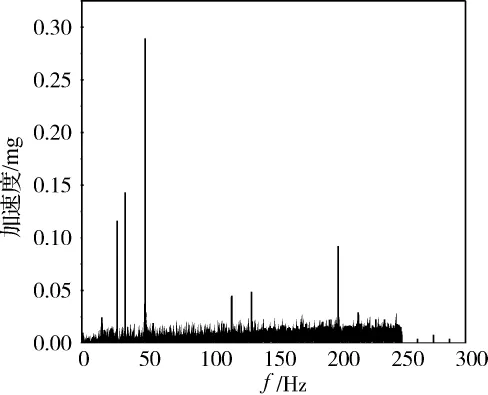
图7 减振后指标Fig.7 Vibration acceleration using dynamic absober
3.2 安装条件和阻尼减振
不同的安装条件会影响制冷机的振动状况。但通常情况下,将制冷机刚性安装在质量较大的平板上,其制冷机的振动输出对外界影响较小。但是在机载或星载等条件下,其质量和安装位置受限,因此应合理的设计安装支架和安装约束,使制冷机的振动输出最小。并且在外界环境改变时,制冷机也会受到影响,通过合理的安装阻尼也会减小其振动带来的影响。
4 总结
气动分置式斯特林制冷机的振动较小,其结构简单,并且其振动特点决定了动力吸振器等被动减振方法可以使制冷机的振动输出减小许多。通过实验也验证了动力吸振器可以有效的抑制制冷机的振动输出,尤其是抑制基频的振动分量。与主动减振系统相比,被动减振不耗电能,简单可靠,并且可以保证气动分置式制冷机的优点不变。随着红外探测等分辨力的提高,对制冷机的振动要求也会越来越苛刻,通过合适的被动减振方案可以满足其指标。
1 杨宝玉,吴亦农,府 华,等.斯特林制冷机自适应主动振动控制技术[C].第九届全国低温工程大会,合肥,2009:147-151.
2 Riabezv S V,Veprik A M,Vilenchik H S,et al.Vibration free stirling cryogenic cooler for high definition microscopy[J].Cryocoolers,2009:569-589.
3 Veprik A M,Babitsky V I,Pundak N,et al.Vibration control of linear split Stirling cryogenic cooler for airborne infrared application[J].Shock and Vibration ,2000:363-379.
4 Tomiyoshi Haruyama,Takayaki Tomaru,Toshikazu Suzuki.Present Technology for Reduction of Vibration in Cryocooler[C].28thInternational Comisic Ray Conference,American,3135-3138.
5 George Kopasakis,James E Cairelli,Ryan M Trylor.Adaptive Vibration reduction control for a cryoclooler with a passive balancer[C].Cryogenic Engineering Conference,2001.