一种单目视觉标定飞机方向舵角位移的新方法
2011-02-22何森王志斌
何森,王志斌
(1.中北大学 理学院,山西 太原030051;2.中北大学 仪器科学与动态测试技术教育部重点实验室,山西 太原030051)
非接触精密转角测量在航空、航天和航海等领域的应用非常广泛。如新型飞机研制成功之后,需要进行试飞以检测飞机性能。为了使性能试验数据更加可靠,试飞前,需在机场现场标定飞机上的副翼、襟翼、水平舵和方向舵的角位移传感器。需标定的范围为±45°;要求标定的精度优于0.1°.在这种标定的过程中不允许对飞机的内部结构作任何改动,所以要用非接触的测量方法。文献[1]报道的一种非接触精密测转角的方法,采用反射式闪耀光栅楔形平板做测转角的传感器,其测角范围为0°~360°,在实验室的实验条件下测转角的精度可达到0.000 18°.测量时,要求楔形平板的底面必须同时准确地垂直于待测物体的转轴和入射的激光束。用于在机场现场标定飞机方向舵的角位移传感器时,由于在现场很难确定飞机方向舵转轴的中心轴的准确位置和确切方向,使其设备的安装调节十分困难,很难达到要求;而且在此条件下也很难修正其设备安装不到位导致的测量误差,在现场使用其实用性很差。现有的其他测量范围大的非接触精密测转角的光学测量方法也存在同样的问题。
基于单目视觉的测量方法,其整体结构简单,仪器安装调节容易,国内外学者已经作了大量的研究工作。测量物体相对位置姿态和运动的方案,绝大多数都是以几个特征点做靶面的标志。这类方案虽然经过许多人的不断改进,至今仍然存在求解难、计算结果误差大等问题[2-5]。已公开报道的用其他靶面标志的单目视觉测量方法,其测角的精度也不符合标定的要求。
以双圆做靶面标志的单目视觉测量方法[6],由于引入了圆的“特征直径”的概念,利用特征直径与像面平行的特性,建立的求靶面位置姿态参数的计算方法简单可靠;但没有采用数字图像亚像素精度的处理方法处理照片,其测转角的精度也不够高(0.1°),而且在0°及其邻域存在测量的盲区,使其应用范围受到限制。
1 改进的测量方法
如图1所示,用一个圆周做靶面的主要标志,其圆心为辅助标志,用相交2 直线段的交点准确标明圆心位置。测试靶平行于被测方向舵的转轴安装在舵面上。用一台数码相机对靶面拍照。在测量过程中,要求靶面始终在相机的有效视场内;要求相机的位置固定,但对相机与靶面的相对位置姿态无严格要求,因此数码相机的安装调节简单方便。设计了亚像素精度的处理方法用来实时处理照片,求出靶面圆周标志在像面的椭圆图像的椭圆方程和圆心的像点位置。定义靶面圆周上与像面平行的直径为该圆的特征直径。采用针孔成像模型,基于靶面与像面2 个平面上点之间的射影对应和直线之间的射影对应,并利用特征直径与像面平行的特性,建立了一套算法用来求出靶面的平面方程。飞机方向舵的角位移可用靶面的角位移表示。
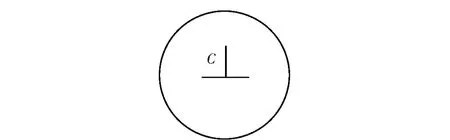
图1 以单圆为标志的测试靶示意图Fig.1 Test target with a circle
2 求靶面的平面方程
测量时相机的位置固定,可取世界坐标系与相机坐标系重合。取相机的主点为世界坐标系的原点O,取z 轴沿相机的主光轴方向向外;取x 轴平行于相机CCD 面阵行的方向、y 轴平行于其列的方向,建立世界坐标系Oxyz.取相机的主光轴与CCD 面阵的交点为像面坐标系的原点O',设其在CCD 面阵中的位置为(U0,V0);取像面坐标系的ξ 轴平行于x 轴,η 轴平行于y 轴,建立像面坐标系O' ξη.在像面坐标系中像点位置的坐标(ξ,η)常采用它在CCD 面阵中对应的位置(U,V)表示,其对应关系为
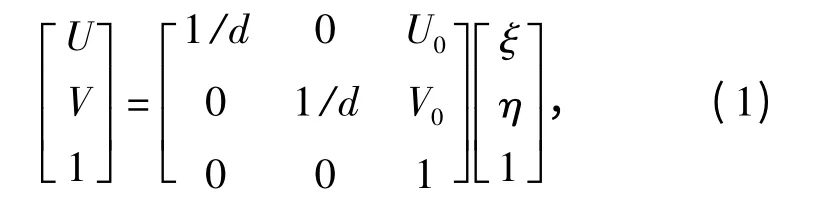
式中:d 为CCD 面阵像素的中心距。像面上点的(U,V)坐标以像素为单位表示。
2.1 求像面已知点的原像点的公式
如图2所示,根据针孔成像原理和相似三角形的性质,利用特征直径与像面平行的特性,基于点对应和直线对应,建立了求像面的已知点在靶面的原像点的计算公式。
1)求圆心C 的世界坐标(xC,yC,zC)

图2 圆的透视投影关系示意图Fig.2 Perspective projection of circle

式中:F 为相机拍照时的焦距;R 为靶面圆周的半径;(UC,VC)为圆心像点的像面坐标;r 为以像素为单位表示的特征半径的像长。
2)求特征直径端点A11、A12位置
设A11(xA11,yA11,zA11)、A12(xA12,yA12,zA12)的像点的像面坐标分别为(UA11,VA11)、(UA12,VA12),则求(xA11,yA11,zA11)

同样可求出(xA12,yA12,zA12).
3)求像面椭圆短轴端点的原像点
设像面椭圆短轴2 个端点的像面坐标分别为:(UB1,VB1),(UB2,VB2);它们的原像点B1、B2的世界坐标分别为:(xB1,yB1,zB1),(xB2,yB2,zB2).则求
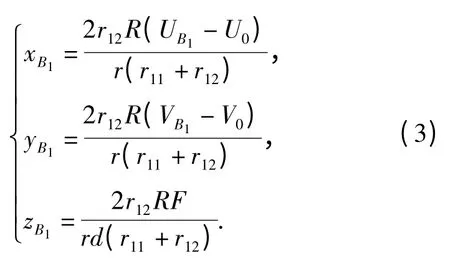
式中:r11、r12分别为像面椭圆内圆心像点至椭圆短轴2 个端点B1、B2的距离。
同样可求出(xB2,yB2,zB2).
于是根据像面各已知点的像面坐标和相机的参数F、d 以及靶面圆周半径R,利用(2)式、(3)式,可分别求出像面各已知点的原像点的世界坐标。
4)求F/d 的公式
如果没有摄影测量专用数码相机,而采用普通数码相机进行测量时,一般很难准确知道相机像素的中心距d 和拍照时相机的实际焦距F 的数值。基于2 个平面上点之间的射影对应和直线之间的射影对应,可以求出

将F/d 的值代入有关公式,也可以求出所需各原像点的位置,并用来求出靶面的平面方程和靶面法线的方向余弦。在对测量精度要求不很高的情况下,可作为一种简便的测量方法,使得新设计的测量方法的应用范围更广。
2.2 求靶面的平面方程
设靶面的平面方程为ax+by+cz=1.建立目标函数Q=∑(axi+byi+czi-1)2.
令∂Q/∂a=∂Q/∂b=∂Q/∂c=0,建立方程

将已经求出的靶面上各原像点的世界坐标代入(4)式,求出参数a,b,c,求出靶面的平面方程。靶面法线的方向余弦为

采用这套算法,其计算公式简单、精确,计算结果准确可靠,使得本方案能够克服以往其他各种以特征点做靶面标志的单目视觉测量方法普遍存在的求解难、计算结果误差大的缺点。
3 飞机方向舵角位移φ 求解
设飞机方向舵在位置1 时,测出靶面法线的方向余弦为cosα1,cosβ1,cosγ1;方向舵转到位置2 时,靶面法线的方向余弦为cosα2,cosβ2,cosγ2,则方向舵从位置1 转动到位置2 时的角位移φ 为

如果靶面与方向舵的转轴不平行,则由(5)式求出的φ 值将小于方向舵角位移的实际值φa,即存在系统误差。但容易利用标定过程中所得数据进行修正。在标定过程中,方向舵作定轴转动,靶面上圆心的运动轨迹在一个以转轴为中心轴的圆周上,而且已经测出了方向舵在多个不同位置时靶面圆心的世界坐标。利用圆心在多个不同位置时的世界坐标,应用2.2 节所述的用最小二乘法拟合求平面方程的方法,求出该轨迹圆所在平面的平面方程,求出方向舵转轴的方向余弦:cosαa,cosβa,cosγa.方向舵在位置1 时,已测出靶面法线的方向余弦为cosα1,cosβ1,cosγ1.于是靶面法线与方向舵转轴之间的夹角ψ 为

方向舵转动时,ψ 值保持不变。方向舵从位置1转到位置2 时,先用(5)式求出φ,再由下式[6]求出修正后的角位移

4 求圆心像点及椭圆方程的亚像素方法
因为测量时,飞机方向舵作定轴转动,相机的位置固定,安装测试靶时,可使圆内相交2 直线段之一大致垂直于方向舵的转轴;并调节相机使像面椭圆内相交2 直线段分别大致垂直于CCD 的行线、列线,可简化图像处理的过程。
4.1 求圆心像点位置的亚像素处理方法
靶面上相交2 直线段的标志在像面成的像,实际上是2 条有一定宽度的窄带相交,用其“交点”来确定圆心像点的位置时,定位误差较大。为减小该项误差,需求出每条窄带的中心线的方程。由于成像时标志轮廓的像差等因素的影响,使窄带的边沿模糊。在窄带的中心线上其灰度最深,向边缘靠近灰度逐渐变浅,直至与背景相同,可用正态分布函数近似描述窄带的横截线上相对灰度的分布特征。该函数的极值点位置就在窄带的中心线上。
图像处理时,先大致确定椭圆内2 条相交的窄带的位置。将其中大致竖直的一条窄带基本均匀地分成几十段。分别在每一段内,选择沿某行Ui切割窄带,并测出在窄带的横截线上各点的灰度值I(Vj).令g(Vj)=I(Vj)-表示其相对灰度值,其中表示像面的平均灰度值。
设

令:

将上式简化成p(V)=AV2+BV+C 的形式。令:

建立目标函数:Q=∑(AV2j+BVj+C-pj)2.
令∂Q/∂A=∂Q/∂B=∂Q/∂C=0,建立方程:
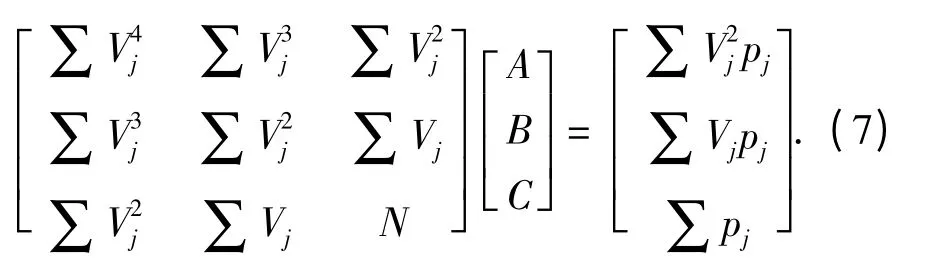
将窄带的横截线上各点的坐标及对应的相对灰度值代入上述方程,解出A、B、C,求出窄带的横截线上相对灰度分布曲线的极值点的V 坐标:Vk=-B/(2A),于是就得到窄带中心线上的一个点坐标(Ui,Vk).如此共找到窄带中心线上几十个点的像面坐标,应用最小二乘法拟合,求出窄带中心线的直线方程。用同样的方法求出椭圆内横向窄带的中心线的直线方程,从而能准确求出圆心像点的像面坐标。
4.2 求椭圆方程的亚像素处理方法
靶面圆形标志在像面的椭圆图像的形状和姿态,含有靶面位置姿态的大量信息。要准确提取这些有用信息,需求出该椭圆的方程。但该椭圆形图像实际上是一个椭圆形圆环,而且其边界模糊。为减小测量误差,需求出该椭圆形圆环的中心线所构成的椭圆来建立椭圆方程。先确定椭圆的大致位置,并将椭圆形圆环分成上下、左右4 段。然后对其每段采用4.1 节的亚像素处理方法求出窄带的中心线上的点,共求出椭圆形圆环的中心线上几十个点的像面坐标。再利用这些点,应用最小二乘法拟合求出椭圆的方程。拟合计算的大致步骤如下。
在本方法的有效测量范围内,靶面圆形标志在像面的图像是一个非蜕化的椭圆,可令该椭圆的方程为x2+Bxy+Cy2+Dx+Ey+F=0.建立目标函数:

令:

建立方程:

将已求出的像面椭圆形圆环的中心线上几十个点的像面坐标代入上述公式,求出B、C、D、E、F,求出椭圆的方程,并用来求出椭圆短轴端点位置和特征直径端点的像点位置以及特征直径的像长。
为提高抗噪声能力,得到椭圆方程后,可根据该方程来检查拟合椭圆的原始数据,剔除其中偏离椭圆较远的数据,再重新拟合,求出椭圆方程。
5 角位移测量精度仿真实验
根据针孔成像原理(即未计入相机成像误差的影响),设计了一套计算机仿真测试软件,相机的参数和测试靶的位置姿态参数可分别设定。设靶面圆心坐标xC=10 mm,yC=10 mm,zC=2 000 mm,圆半径R=150 mm,相机焦距F=20 mm.靶面从与像面平行的初始位置开始,依次转到1°、3°、5°的位置,然后再每次转动5°,作一系列仿真实验。并给椭圆添加不同的高斯噪声来进行一系列仿真实验。仿真实验分2 步骤:1)根据设定的参数,将靶面标志用数学方法投影到像面,得到其仿真的“数字照片”。2)为数字图像处理和求解过程的仿真。图3列出了仿真测角位移φ 的几种误差曲线,其中图3(a)为未加噪声时测角位移φ 的误差曲线;图3(b)为分别加了μ=0,σ=1 像素和μ=0,σ=2 像素的高斯噪声时测角位移φ 的误差曲线。

图3 仿真测量角位移φ 的误差曲线Fig.3 Simulated error curve for φ
仿真试验结果,添加了μ=0,σ=2 像素的高斯噪声时,测角位移φ 的误差也小于0.06°,表明本方案设计的图像处理方法和求解的计算方法很精确,而且其抗噪声的能力强。和文献[4-6]的测量方案的仿真结果比较,测角精度和抗噪声能力有显著的改善。用于实际测量时,其角位移的测量误差将主要来自相机成像的枕形失真。家用中等档次的数码相机其枕形失真率≤0.4%,且该误差属于系统误差,可通过对相机进行标定加以修正。其次是测试靶安装不到位导致的测量误差,已设计了修正方法可以修正该误差。因此本方案能满足标定飞机方向舵角位移的精度要求。
6 结论
1)在未计入相机成像误差等因素影响的情况下,仿真试验结果的误差小,表明用于求解的计算方法是精确的。
2)设计的数字图像的亚像素精度的处理方法,能有效提高测量精度,并具有较强的抗干扰能力和容错的能力。
3)能修正靶面安装不到位导致的测量误差,使测试靶容易安装。
4)该方法能用于在现场标定飞机的副翼、襟翼、升降舵和方向舵的角位移,并适用于多种类型的飞机。
References)
[1] 陶卫,赵辉,刘伟文.新型反射式闪耀光栅楔形平板[J].光电工程,2005,32(8):40-43.TAO Wei,ZHAO Hui,LIU Wei-wen.New reflective blazed grating wedge-plate[J].Opto-Electronic Engineering,2005,32(8):40-43.(in Chinese)
[2] Philip N K,Ananthasayanam M R.Relative position and attitude estimation and control schemes for the final phase of an autonomous docking mission of spacecraft[J].Acta Astronautica,2003,52:511-522.
[3] 邱志强,陆宏伟,于起峰.基于图像的三维刚体运动估计算法比较[J].光学技术,2004,30(1):109-112.QIU Zhi-qiang,LU Hong-wei,YU Qi-feng.A comparison of algorithms for image-based 3D motion estimation[J].Optical Technique,2004,30(1):109-112.(in Chinese)
[4] 张世杰,曹喜滨,陈雪芹.航天器相对位姿参数光学测量解析算法[J].航空学报,2005,26(2):214-218.ZHANG Shi-jie,CAO Xi-bin,CHEN Xue-qin.Closed-form method for relative pose parameters of spacecraft based on optical measurement[J].Acta Aeronautica Et Astronautica Sinica,2005,26(2):214-218.(in Chinese)
[5] 张志勇,张靖,朱大勇.一种基于视觉成像的快速收敛的位姿测量算法及实验研究[J].航空学报,2007,4:943-947.ZHANG Zhi-yong,ZHANG Jing,ZHU Da-yong.A fast convergent pose estimation algorithm and experiments based on vision images[J].Acta Aeronautica Et Astronautica Sinica,2007,4:943-947.(in Chinese)
[6] 何森,侯宏录,王尧.标定飞机舵面角位移的双圆靶单目视觉方法[J].兵工学报,2007,28(7):889-892.HE Sen,HOU Hong-lu,WANG Yao.Angular shift calibration for rudders based on monocular vision[J].Acta Armamentarii,2007,28(7):889-892.(in Chinese)
