基于叶尖定时的旋转叶片同步振动辨识新方法
2011-02-13欧阳涛郭文力段发阶李孟麟
欧阳涛,郭文力,段发阶,李孟麟
(1.天津大学 精密测试技术及仪器国家重点实验室,天津 300072;2.中国医科大学 附属盛京医院放射科,沈阳 110004)
旋转机械广泛应用于航空、电力、能源工业等部门,主要包括航空发动机、燃气轮机、烟气轮机、汽轮机等。旋转叶片作为旋转机械的核心部件,对旋转机械的安全运行起到关键性作用。振动作为叶片故障的主要原因,为了实时掌握叶片振动信息,预防叶片故障发生,叶片振动在线测量技术已被广泛重视和研究。
叶尖定时测振技术作为非接触式测量方法,在旋转机械在线监测领域具备一定的优势。叶尖定时基本原理[1-5]是将叶尖定时传感器沿径向安装在旋转机械相对静止的壳体上,利用传感器获取叶片到来的脉冲时间t,通过不同的分析算法对该信号序列{t}进行处理,从而辨识出叶片振动性能参数。叶尖定时测振系统如图1所示。针对叶片不同的运行状态和振动形式,目前,已研究的处理方法主要有用于辨识异步振动的多传感器均布法、“5+2”分布法、差频法等[6];用于辨识同步振动的间断相位法[7]、速矢端迹法[8]、双参数法[9]、自回归法[10]等等。

图1 叶尖定时测振系统框图Fig.1 BTT system schematic
本文主要在变速扫频测量方法的基础上,提出一种新型的多传感器倍频遍历辨识方法,采用多支任意分布的叶尖定时传感器准确并完整地辨识出叶片同步振动参数。将该方法在某型号航空设备上进行模拟实验,测量结果与理论分析结果基本一致。
1 变速扫频测量方法
叶尖定时测振方法属于严重的欠采样方法[5],对于恒速下的同步振动,单支叶尖定时传感器只能获取同一相位处的振动点。变速扫频测量方法是通过转速变化来改变采样时刻的叶片振动相位,从而获取包含更多振动信息的振动数据,即缓慢均匀增加(或降低)转速对整个转速范围进行速度扫描。速矢端迹法、双参数法等叶尖定时测量方法均属于变速扫频测量方法。
由叶片振动模型可知,单一的叶片稳态振动可写成:

旋转叶片同步振动频率与转速密切相关,通常为转速频率的整数倍,即ω=NeΩ,Ω为转速角频率,Ne为自然数,称为振动倍频。即式(1)中ωt=NeΩt。根据叶尖定时原理可知,叶片经过叶尖定时传感器的时间序列为{ti},i代表圈数,Ωdt=2πi+φr,φr为叶尖定时传感器相对转速同步传感器的角度。而在同一共振区内Ne是不变的,因此可令相位:

代入式(1),再联立式(2)、式(3),最后可得叶片振动位移为:
其中,

如果阻尼系数ξ很小,当振动频率接近固有角频率(ω≅ωn),即发生共振时,振幅取得最大值:

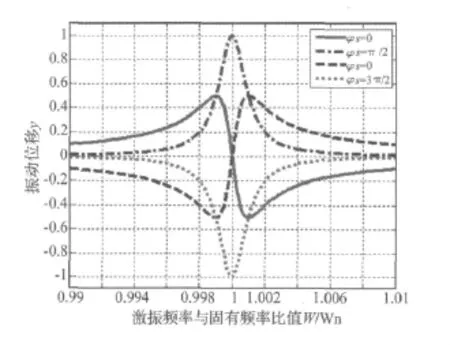
图2 共振区振动位移仿真曲线Fig.2 Emulational curve of blade resonance
将式(4)写成函数变量形式:

以ω自变量,y为因变量,其余参量为需辨识的叶片振动参数。为了准确获取叶片共振时的振动频率ωn、振动幅值Amax、阻尼系数 ξ以及相位 φs等振动参数,对函数(7)进行最小二乘曲线拟合。本文采用兼顾高效性和可靠性的Levenberg-Marquardt拟合方法(简称 LM 法)[11]。

2 振动倍频遍历方法
在机壳上一周内任意分布n支叶尖定时传感器,按转子旋转方向传感器依次编号为:0~n-1,相对0号传感器的安装夹角分别为 α0、α1、α2、…αn-1(其中令α0=0)。变速扫频测量时,不同的叶尖定时传感器采样到不同的振动位移值表示为:



由拟合结果可以得到每个传感器对应的相位 φs,进而计算出各传感器相对0号传感器的相位差Δφi(i=0,1…n-1)。
假设叶片实际振动倍频为,通过曲线拟合得到各传感器对应的相位,并且值均规整到[0,360°)。从而得到规整后的相位差,用向量表示为。由式(9)知,相位差与叶片振动倍频密切相关。而实际中,由于振动倍频Ne值是一个自然数,并且叶片可能产生的振动倍频值也是有限的,在叶片设计时,已经基本估计出所有的主要振动倍频范围。因此,可选取一定的Ne范围,按以下方法对其进行遍历:将可能的Nek值依次代入式(9),并规整到[0,360°),求得对应的相位差 向 量 ΔΦk,ΔΦk=[Δφ0kΔφ1k…Δφ(n-1)k]T,与实际测得的相位差 ΔΦ*比较,求得误差为:

其中,Ek=[e0ke1k…e(n-1)k]T。
以误差E的方均根值表示相位差遍历估计值偏离实际测量值的大小:
理论上,当遍历倍频Nek=时,Sk=0。考虑实际测量中的存在各种误差,可取遍历范围内明显最小的Sk对应的倍频Nek即为实际振动倍频。从而辨识出叶片同步共振的动频率:

3 实验结果分析
为了验证变速下振动倍频遍历方法对叶片同步振动的辨识效果,在某型号航空设备进行了模拟实验。在转子机壳上分布了多支光电式叶尖定时传感器,如图3所示。顺着转速方向依次编号为TIP0~TIP6。安装夹角 α0~ α6依次为:0°、18.4°、36.0°、53.6°、72.3°、119.5°、238.9°。
实验过程中,大约从4 000 r/min到12 000 r/min进行均匀升速扫频,为了获取明显的振动效果,同时采用氮气对叶片进行连续气激。整个过程采用自主开发的光电式叶尖定时测振系统进行实时监测,图4为采集软件实时监测的叶片振动情况(图中振动位移棒状图为放大50倍后的效果)。
整个升速过程中某叶片(0号)振动位移及转速变化曲线如图5所示。可以清晰看到,经过某些转速时,叶片振动位移明显增大,即产生了图2所示的同步共振。提取每个共振区,按照曲线拟合和振动倍频遍历方法进行进一步分析,可以准确获取叶片同步振动参数。下面以0号叶片9 000 r/min(150 Hz)附近的共振区数据为例(图5所示圈内),进行分析处理。
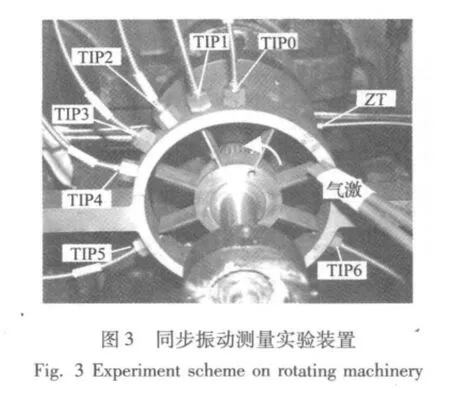

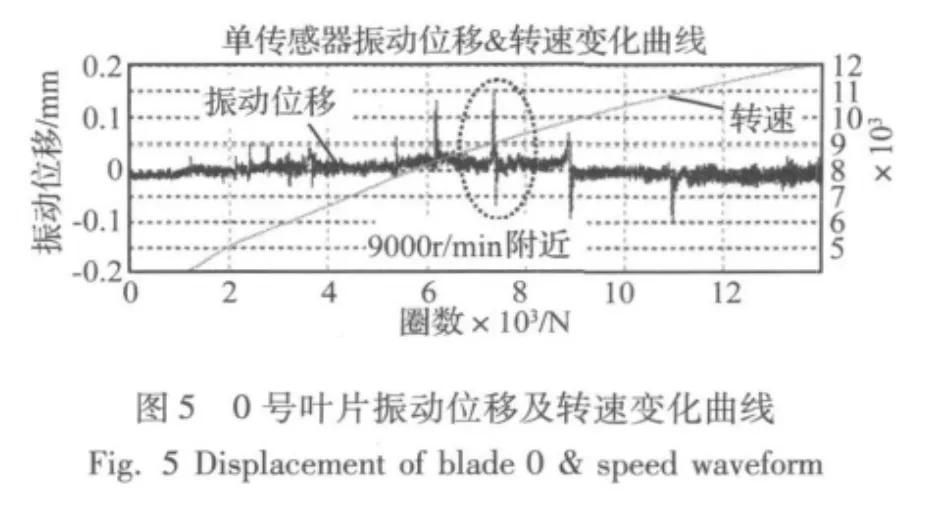
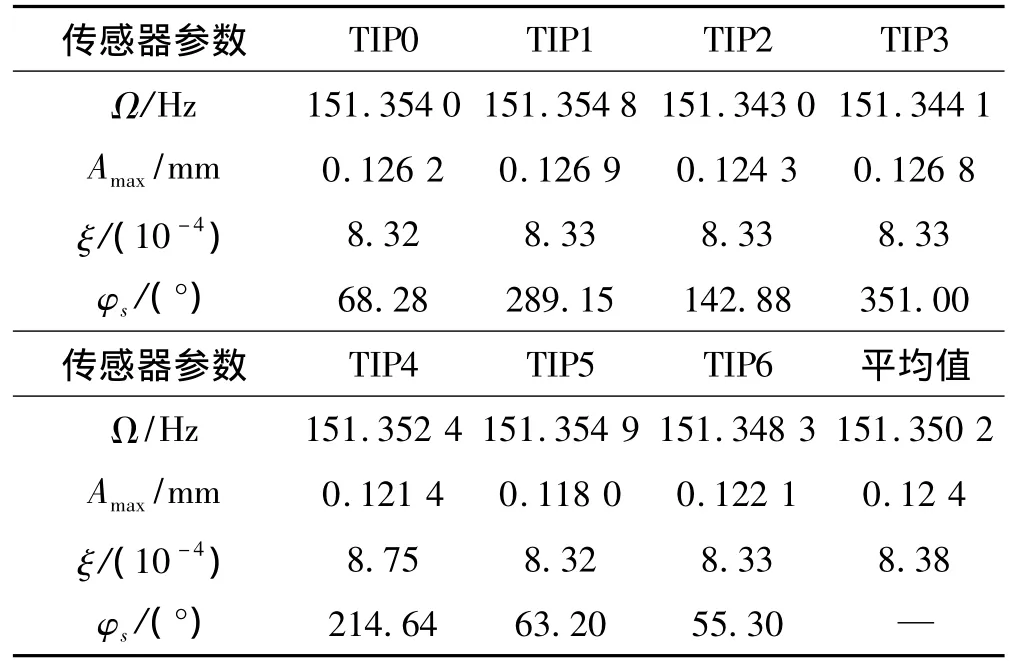
表1 振动参数拟合辨识结果Tab.1
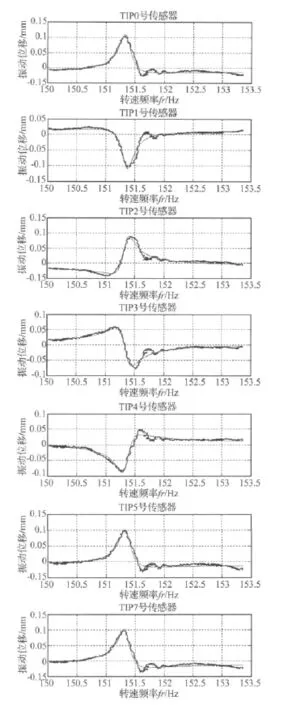
图6 振动位移曲线拟合结果Fig.6 Curve-fitting of vibration displacement
7支叶尖定时传感器测得的振动位移曲线各不相同,采用前述的曲线拟合方法,分别进行分析,拟合效果如图6所示。并且可以准确获取叶片共振时的转速频率Ω、振动幅值Amax、阻尼系数ξ以及相位φs等振动参数,如表1所示。从拟合辨识结果可知,7支传感器辨识叶片振动参数的重复性精度非常高:共振转速频率辨识的最大绝对误差为0.007 2 Hz,最大相对误差为0.05‰;振动幅值辨识的最大绝对误差为0.005 7mm。最大相对误差为4.6%;阻尼系数辨识的最大绝对误差为0.37,最大相对误差为4.4%。
为了进一步辨识出叶片同步振动倍频Ne及叶片动频ωn,按照振动倍频遍历方法进行分析。选取0~30的振动倍频遍历范围,以相位差的误差方均根值Sk为纵坐标,倍频遍历结果如图7所示。由图可以清晰可见,在倍频Ne=12时,误差方均根值明显出现极小值1.01°,与其他遍历倍频对应的误差方均根值相差均在60°以上。表2为实际测得相位差与Ne=12遍历相位差的数据对比。由此可知,0号叶片在该转速附近发生了12倍频的同步共振,动频大小为ωn=151.35×12=1 816.2 Hz。
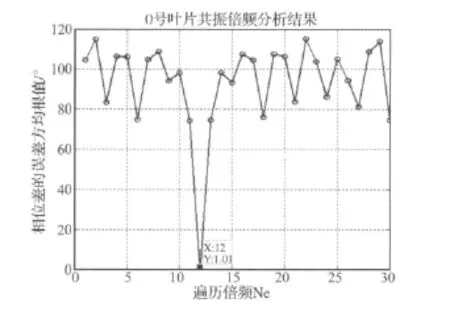
图7 振动倍频遍历结果Fig.7 Result of traversing engine orders
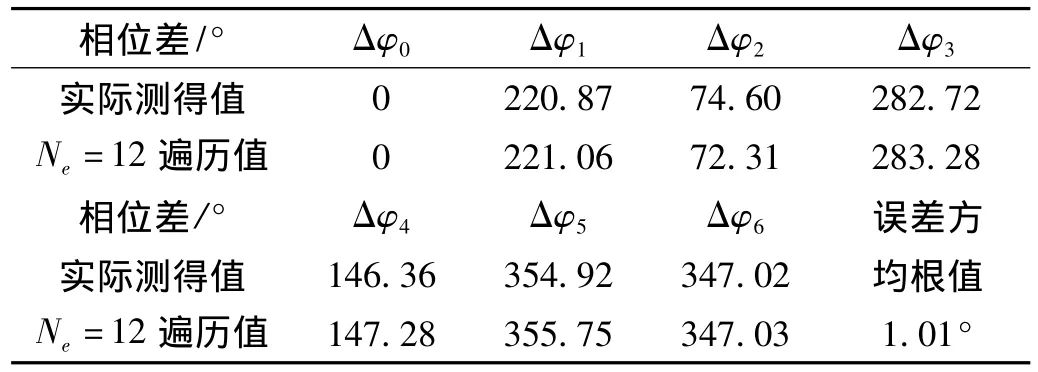
表2 相位差数据比较(规整到0°~360°)
同理,对变速测量过程中其他同步共振区进行分析处理,可以准确辨识出不同转速下同步共振参数,如表3所示。不同共振区的几组数据倍频遍历结果的误差方均根值均出现明显的极小值,平均约为7.95°,与其他误差方均根值相差均在40°以上。
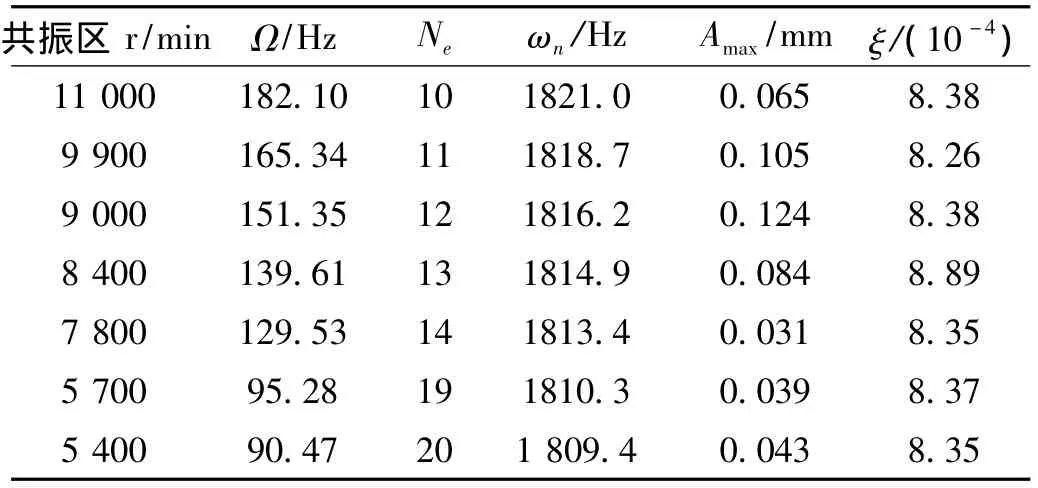
表3 多个共振区参数辨识结果
由表3可知,0号叶片的固有频率在1 810 Hz左右,随着转速升高,叶片动频值也略有增大,与旋转叶片理论设计值相当。根据以上辨识结果,可以绘制出0号叶片在某区域的坎贝尔图,如图8所示,竖条线代表所处共振点的共振幅度大小。坎贝尔图所示结果与叶片设计的一阶振动基本一致。
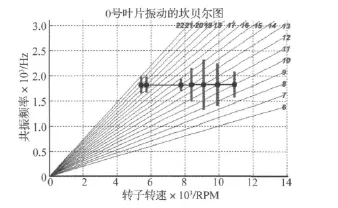
图8 0号叶片振动坎贝尔图Fig.8 Campbell diagram of the blade 0
按照以上方法,可以对转子上所有叶片进行分析处理,可获取所有叶片在整个变速范围内的同步振动性能。
4 结论
本文基于叶尖定时原理,在速矢端迹法基础上做了进一步完善,设计一种变速下辨识旋转叶片同步振动的新方法并进行了振动测量实验。采用多支任意分布的叶尖定时传感器,按照速矢端迹法原理,通过振动倍频遍历方法准确并完整地获取叶片不同转速下的倍频、动频、振幅等同步共振信息。理想情况下,采用两支传感器即可辨识出变速下叶片的同步振动倍频及固有频率(双参数法[9]),但由于实际测量误差的存在,采用多支传感器可减小误差影响,获得更好的测量结果。该方法主要用于变速下旋转叶片振动测量和测试,结合叶尖定时测振中恒速振动分析、异步振动分析等技术,形成一套完整的旋转叶片振动实时监测系统,为旋转机械安全运行提供可靠保障。
[1]HeathS, Imregun M, A survey ofblade tip-timing measurement techniques for turbo-machinery vibration [J].Journal of Engineering for Gas Turbines and Power,1998,120(10):784-791.
[2]Zielinski M,Ziller G.Non-contact vibration measurements on compressor rotor blades[J].Measurement Science and Technology,2000,11:847-856.
[3]И.E.萨勃洛斯基等著,吴士祥,郑叔琛,译.涡轮机叶片振动的非接触测量[M].北京:国防工业出社,1986:40-60.
[4]方志强,段发阶,孙宇扬,等.非接触式叶片振测系统的叶尖定时传感器的研究[J].计量学报,2003,24(2):119-121.
[5]Gallego Garrido J,Dimitriadis G.Validating synchronous blade vibration amplitudes from blade tip-timing data analysis[J].Institution of Mechanical Engineers,2004,623(23):205-213.
[6]张玉贵,段发阶,方志强,等.基于叶尖定时的非接触式旋转叶片异步振动分析[J].机械工程学报,2008,44(7):147-150.
[7]张玉贵,段发阶,方志强,等.间断相位法测量叶片同步振动幅值的研究[J].振动与冲击,2008,27(10):183-186.
[8]张玉贵,段发阶,方志强,等.速矢端迹法分析叶片同步振动幅值的方法研究[J].传感技术学报,2007,20(9):2044-2048.
[9]Heath S.A new technique for identifying synchronous resonances using tip-timing[J].Journal of Engineering for Gas Turbines and Power,2000,122:219-225.
[10] Dimitriadis G,Carrington I B,Wright J R,et al.Blade-tip timing measurement of synchronous vibration of rotating bladed assemblies[J].Mechanical Systems and Signal Processing,2002,16(4):599-622.
[11]张光澄.非线性最优化计算方法[M].北京:高等教育出版社,2005:159-166.
