转动加载柔性铰链微位移放大器
2011-02-01李万全高长银冯地耘肖启明
李万全 高长银 冯地耘 肖启明
1.重庆三峡学院,重庆,404000 2.郑州航空工业管理学院,郑州,450015
转动加载柔性铰链微位移放大器
李万全1高长银2冯地耘1肖启明1
1.重庆三峡学院,重庆,404000 2.郑州航空工业管理学院,郑州,450015
设计了一种基于柔性铰链的压电叠堆驱动微位移放大器,该机构由半圆柱转动副加载机构和柔性铰链放大机构两部分组成。对半圆柱转动副的结构特点进行分析,给出其应力分布和摩擦力矩的计算公式;通过分析柔性铰链所能承受的最大输入位移、柔性铰链位移损失、杆件弹性变形、转动副对加载过程的影响计算出放大器的放大能力。将计算结果与有限元仿真结果进行比较,两者基本吻合,证实了该结构设计的可行性。
微位移;放大;转动副;柔性铰链
0 引言
压电叠堆驱动器是目前应用较为广泛的微位移驱动器件,具有结构紧凑、体积小、质量轻、精度和分辨率高、频响高、功耗低、输出力大等优点[1-4],因此在精密定位及控制领域得到广泛应用。但是由于压电陶瓷叠堆的最大输出位移小(为其长度的1/1000左右[5]),难以满足大多数工作场合的要求,故通常采用微位移放大机构对压电叠堆的输出位移进行放大。柔性铰链具有体积小、无摩擦、无间隙、运动灵敏度高的特点[6],在各种要求小角位移、高精度转动的场合得到广泛应用[7-8]。目前,国外微位移放大器广泛采用柔性铰链结构[3-4,9],但由于结构体积相对较大,不适于在安装空间有限的机构内部使用。
柴油机共轨喷射技术也将压电陶瓷叠堆作为位移驱动元件[10],采用柔性铰链进行位移放大。由于驱动机构安装在喷油嘴内部,结构和体积受到严格限制,实际放大性能与理论计算结果相差甚远,故其设计过程中必须综合考虑放大器结构和微位移在放大过程中的位移损失。本文采用半圆柱副分体式加载结构对放大器进行加载,并采用直圆型柔性铰链结构设计了一种微位移放大机构。
1 柔性铰链微位移放大机构
1.1 直圆型柔性铰链原理
位移放大器铰链节点采用单轴直圆型结构,直圆型柔性铰链结构见图1。在绕z轴的力矩Mz作用下,其最大应力σmax的表达式为[11]
式中,t为柔性铰链最小厚度;R为柔性铰链直圆半径;b为柔性铰链的宽度;C为应力集中因数。
铰链节点的转动刚度表达式为[12]
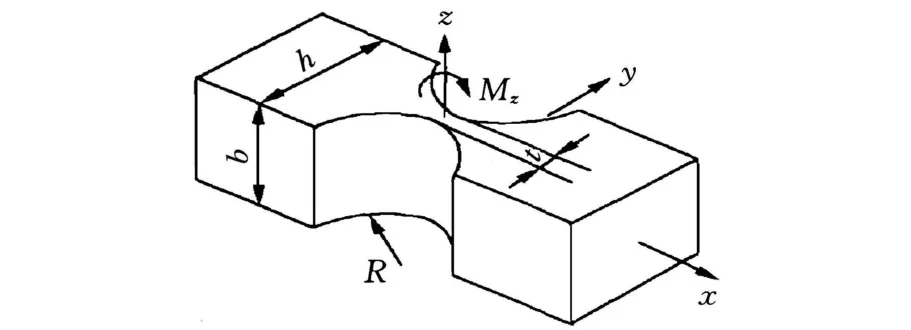
图1 直圆型柔性铰链s=R/t
1.2 加载机构设计
一般情况下,柔性铰链均设计成整体结构,但在对位移放大器安装空间有严格要求的条件下,柔性铰链的拉压变形对放大倍数的影响增大,变形量过大甚至可能出现输出位移小于输入位移的情况,且应力可能超过材料的许用应力,造成放大结构失效。由于采用柔性铰链传递加载力会引起铰链压缩,且铰链弯曲变形使杠杆受到拉力,引起杠杆铰链的拉伸变形,应力增大,故本文研究采用半圆柱副分体式加载结构,不仅避免了铰链压缩造成的放大倍数的损失,且杠杆受到的拉力也大为减小,杠杆铰链的拉伸变形相应减小,减小了铰链产生的应力。
图2为一个径向半圆柱副的结构图,纵向载荷为F。为简化问题,作以下假设:①半圆柱体和圆柱槽均为弹性体,接触面为理想接触,半径相等,摩擦因数处处相等;②接触面上的正应力按余弦规律分布[13],即σ=σB cosω。
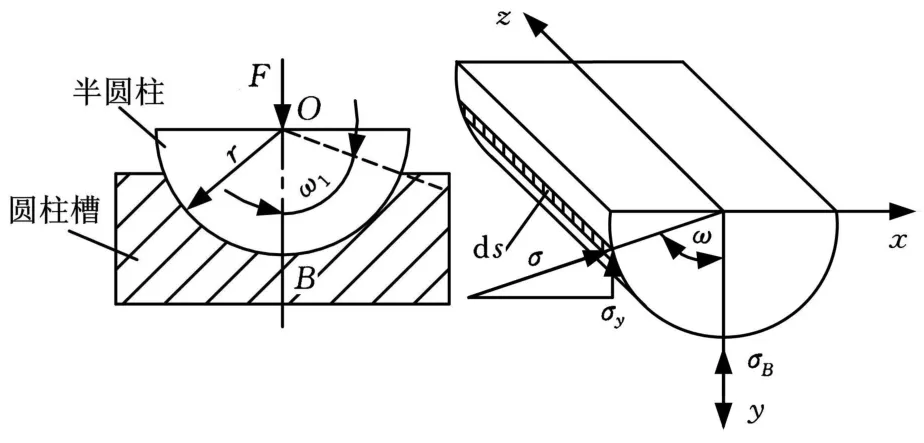
图2 半圆柱副原理图
根据图2所示几何关系,可得

式中,σ为正应力;σy为正应力沿y方向的分量;σB为圆柱槽底部受力最大点处的应力;r为圆柱半径;l为半圆柱长度。
根据y方向上的平衡关系,有

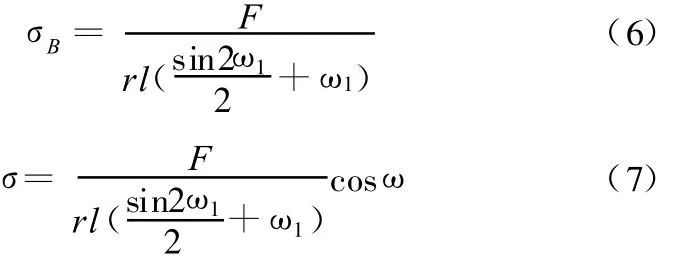
由式(7)可知接触面上的正应力与结构参数r、l、ω、ω1密切相关。
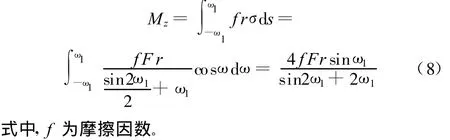
半圆柱副绕z轴转动的摩擦力矩为
1.3 微位移放大器整体结构设计
机构采用对称式结构,有较高的整体刚性,理论上可完全消除机构的侧向附加位移,有效减小了自身的纵向耦合位移误差[6]。分析过程只对放大结构的左半部分进行分析,且忽略侧向变形的影响。图3为微位移放大机构原理图。
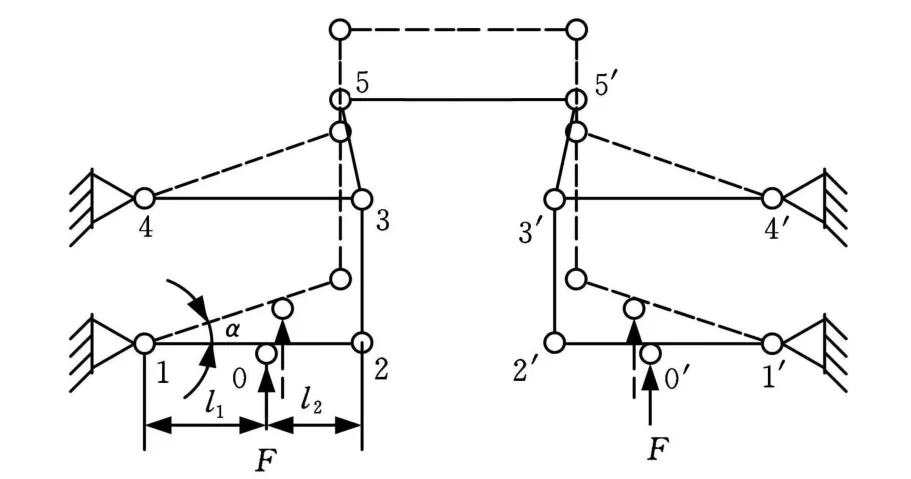
图3 微位移放大机构原理图
由图3的放大器结构可知,由半圆柱副传递的载荷首先作用到杆12上;杆34主要起导向的作用。杠杆12的理论放大倍数 k1=1+l2/l1,放大过程中位移和载荷变化如图4所示。随着杠杆的转动,半圆柱体以铰链中心为圆心转动,加载力的作用点也相应移动,与初始位置的偏移量为

式中,d为圆柱槽底部中心到铰链中心线的垂直距离。
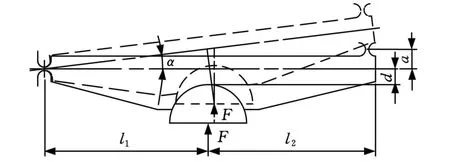
图4 杠杆12运动原理
外加载荷在杠杆转动过程中分解为两部分,垂直杠杆的分力Fy产生力矩驱动杠杆转动,沿杠杆方向的拉力Fx使铰链拉压变形。所设计的放大器的位移损失主要包括弹性铰链的拉压变形和杠杆的弹性变形等。直圆型铰链的拉压变形公式为[14-15]
由于初始阶段杠杆12的铰链1和铰链2不在图3所示的水平线上,杠杆开始运动后铰链2随之发生倾斜,对放大倍数产生影响,见图4。
设铰链2的中心到铰链1中心线的垂直距离为a,则铰链旋转所引起的输出位移偏差为
Δs=a(1-cosα) (12)
在位移放大器加载过程中,杠杆12末端产生位移损失,设杠杆末端2受力为F2,则位移损失可按以下公式计算[15]:

2 微位移放大器放大能力分析
2.1 理论计算
首先假设微位移放大器工作时为刚性体,仅在铰链节点处产生微小弹性变形。由于放大器结构具有对称性,故只需对图3左半部分的节点进行计算。考虑到该位移放大器工作频率高,且工作环境温度在-40~140℃之间,材料选用弹簧钢60Si2CrVA,其弹性模量E=210GPa,许用应力[σ]=1211MPa,泊松比 μ=0.3。
取圆柱半径r=1mm,长度 l=15mm,接触角ω1=π/4,当半圆柱副接触面的应力达到许用应力值时,可承受的最大载荷F=23342N,远远大于压电叠堆对位移放大器1500N的最大驱动力。
设微位移放大器最大输入位移为si,根据式(1)求得铰链节点1、节点2的最大输入位移:

取铰链节点1的结构尺寸为R=1mm,t=0.2mm,b=15mm,l1=3mm,则计算获得的铰链节点1、节点2最大输入位移为0.076 33mm。
取l2=7mm,d=1.1mm,设半圆柱副输入的位移si=0.025mm,输出端承受载荷为200N,计算放大倍数为3.31,则节点2输出位移应为0.082 75mm。考虑到杠杆弹性变形产生的位移为0.001 67mm,垂直于杠杆方向上的铰链总压缩量为0.007 98mm,铰链旋转输出位移偏差为0.000 10mm,由此可得到理论总输出位移为0.0730mm。
2.2 仿真验证
为验证上述结果的正确性,采用ANSYS仿真软件对微位移放大机构进行验算,微位移放大器形变、应力分布分别如图5、图6所示。整体结构最大应力为480MPa,小于材料的许用应力。输出位移为0.0607mm,满足压电叠堆共轨喷射驱动器0.06mm输出位移的要求。位移仿真结果与理论计算值偏差17%,这是由于忽略了除杆件12外其他杆件的弹性变形和节点内反力所致。
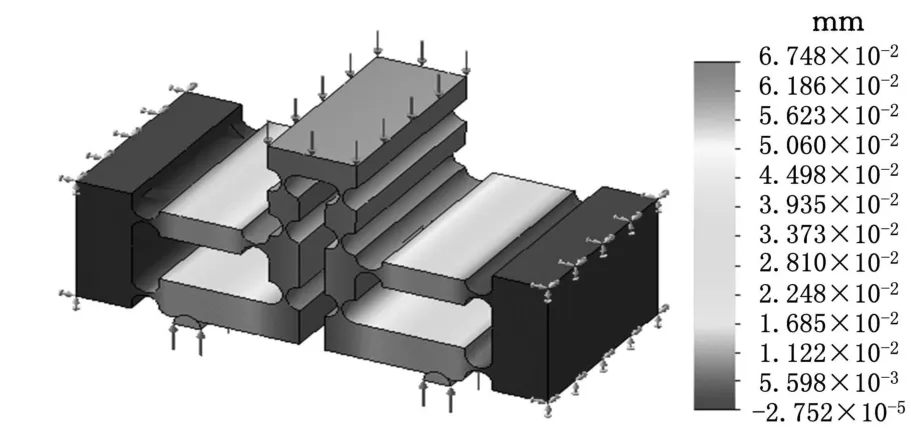
图5 放大机构形变图
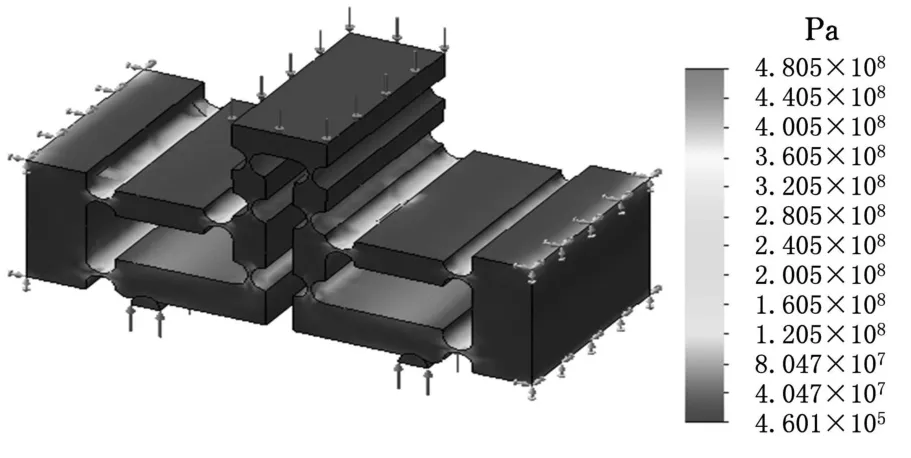
图6 放大机构应力云图
2.3 实验装置设计
实验采用的压电叠堆执行器由300多层厚77μm的PZT压电陶瓷薄片烧结而成,叠堆外形尺寸为30mm×7mm×7mm,采用银钯合金作为内电极材料,最大可提供35μm的工作行程。压电叠堆执行器安装在一个圆柱形塑料套筒内,内部接有两根外接电极,通过导线与执行器模块外电极连接,驱动电源通过外接电极向压电叠堆提供驱动电压,底部开有7mm×7mm方孔,叠堆从套筒中伸出,套筒上部用留有电极孔的顶板封闭。叠堆与塑料套筒之间填充有碳酸氢钙,烧结后形成多孔碳酸钙,形成的孔隙内部充入变压器油以提高烧结材料的散热性能和绝缘性能。
柔性铰链放大器采用电火花线切割工艺,采用小电流进行加工,避免出现微裂纹等缺陷[16],对加工后的柔性铰链放大器机构进行退火处理。压电执行器与柔性铰链放大器之间用一块尺寸为22mm×15mm×2mm的薄钢板隔开,即可起到对两个半圆柱副均匀加载的作用,同时还可以起到保护压电叠堆的作用。放大机构位移输出端采用预紧弹簧施加载荷,由于输出位移很小,故实验过程中弹簧力的变化忽略不计。实验装置原理见图7。微位移检测装置由纳米激光干涉仪及相关数字采集电路组成。图8所示为仿真结果与实验数据的对比,可以看出两者基本一致。
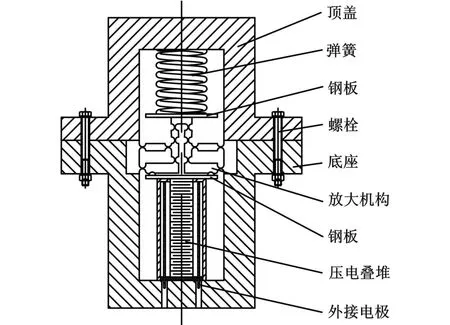
图7 实验机构原理图
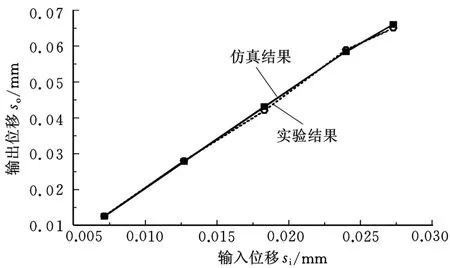
图8 实验结果与仿真数据比较
3 结语
微位移放大器加载结构是整个放大系统最薄弱的环节,本文采用分体式设计方法,采用半圆柱转动副取代铰链结构对位移放大器加载,可有效提高系统的整体性能,既充分利用了柔性铰链特有的优点,又避免了铰链结构可能出现的由于大应力变形而引发的结构破坏。转动副结构受力面积大,加载产生的应力小,产生的压缩变形可忽略不计,可有效提高结构的整体寿命,这一点对应用高频工作场合的微位移放大器尤为重要。
[1] 苏瑜,周文华,庄福如,等.高压共轨柴油机压电喷油器的驱动响应特性[J].江南大学学报(自然科学版),2009,8(2):202-206.
[2] 马记,吴月华,徐旻,等.基于压电陶瓷驱动的腹腔手术微型机器人关节驱动部件研究[J].机器人,2003,25(4):335-338.
[3] Culpepper M L,Anderson G.Design ofa Low-cost Nano-manipulator Which U tilizes a Mono lithic,Spatial Compliant Mechanism[J].Precision Engineering,2004,28(8):469-482.
[4] H ubbard N B,Cu lpepper M L,Sneddon IN.A ctuators for M icropositioners and Nanopositioners[J].Applied M echanics Review s,2006,59(11):324-334.
[5] Ma H aoquan,Hu Dejin,Zhang Kai.M ic ro-displacement Amplifying Mechanism Driven by Piezoelectric Ac tuator[J].Journal of Southeast University(Eng lish Edition),2004,20(1):75-79.
[6] 周志平,王隆太,马志新.两级对称式柔性铰链位移放大机构的设计与分析[J].机械设计与研究,2007,22(5):62-64.
[7] 秦宇,冯之敬.直梁型柔性铰链制造误差对刚度性能影响的建模与分析[J].中国机械工程,2008,19(18):2182-2185.
[8] 范叶森,王三民,袁茹,等.集中式柔性机构动力学等效分析方法研究[J].机械科学与技术,2007,26(7):880-884.
[9] Juuti J,Lonnakko R,Kordás K,et al.M echanically Amp lified Large Disp lacement Piezoelectric A ctuators[J].Sensors and Actuators,2005,120:225-231.
[10] Kalish Y,H eneinb N A.Stress Analysis o f M ultilayer Piezoelectric Actuators for Diesel Fuel Injection Sub jected to Square Pulse Voltage Excitation[C]//Industria l and Commercial A pp lications o f Smart Structures Technologies.San Diego:Proc.SPIE,2007:1-12.
[11] 王隆太,周志平,马志新.柔性铰链位移放大机构放大能力和负载能力分析[J].机械设计,2007,24(7):11-13.
[12] 吴鹰飞,周兆英.柔性铰链转动刚度计算公式的推导[J].仪器仪表学报,2004,25(1):125-128.
[13] 邓乐,熊开选.球面摩擦副磨损性能分析[J].矿山机械,1997,7:40-41.
[14] 薛实福,李庆祥.精密仪器设计[M].北京:清华大学出版社,1991.
[15] 郑伟智,辛洪兵.微位移放大机构位移损失分析[J].机械设计,2003,20(8):25-26.
[16] 刘德忠,许意华,费仁元,等.柔性铰链放大器的设计与加工技术[J].北京工业大学学报,2007,27(2):161-163.
M icro-disp lacement Amp lifying Mechanism Using Loading Revolute Jointsand Flexible Hinges
LiWanquan1Gao Changyin2Feng Diyun1Xiao Qiming1
1.Chongqing Three Gorges University,Chongqing,404000
2.Zhengzhou Institute of Aeronautical Industry M anagent,Zhengzou,450015
A m echanism based on flexib le hinges to amp lify the disp lacem ent of stack-type piezoelectric ceramic actuator was designed.The mechanism was com posed of semi-cylindrical revolute joints and flexible hinges.The performance of semi-cy lindrical revolute joint was studied,and the models of stressand friction torque of semi-cy lindrical revolute jointwere performed.On the basisof analysisonm aximum inputdisp lacement,elastic deformation,disp lacement loss of flexible hingesand the effect of revolute joint on loading,the disp lacement magnification mechanism was obtained.The resultsof the finite element analysisand theoretic analysis are in good agreement,which indicates the analyticalmethods are correct.
small displacement;am plify;revolute joint;flexible hinge
TH 112.5
1004—132X(2011)05—0546—04
2010—02—26
重庆市教委科学技术研究项目(KJ081117);重庆市教委自然科学基金资助项目(KJ101109)
(编辑 袁兴玲)
李万全,男,1968年生。重庆三峡学院物理与电子学院副教授。主要研究方向为传感测控技术、机械设计。发表论文10余篇。高长银,男,1974年生。郑州航空工业管理学院机电学院副教授、博士。冯地耘,男,1970年生。重庆三峡学院物理与电子学院副教授。肖启明,男,1981年生。重庆三峡学院物理与电子学院助教。
