可调速异步盘式磁力联轴器性能参数计算
2011-02-01杨超君李直腾李志宝蒋生发
杨超君 郑 武 李直腾 李志宝 蒋生发
江苏大学,镇江,212013
可调速异步盘式磁力联轴器性能参数计算
杨超君 郑 武 李直腾 李志宝 蒋生发
江苏大学,镇江,212013
提出一种具有新型结构的可调速异步盘式磁力联轴器,其从动盘导体采用深槽齿形结构,通过主从动盘之间的气隙长度的变化来改变磁场强度,从而实现速度的调节。该联轴器可应用在一些大转矩、大振动的机械装备中以避免振动,或实现电机在负载时的软启动。对该磁力联轴器结构与主磁路特点进行了分析,对一台9对极16槽的深槽式异步磁力联轴器进行三维静态、瞬态有限元模拟分析,获得了该磁力联轴器的磁场分布、电流分布情况;并对其转矩、功率损耗以及轴向力等性能参数进行计算,得出它们在瞬态情况下随时间变化的曲线。
可调速异步磁力联轴器;三维有限元;瞬态分析;转矩
0 引言
联轴器是机械传动系统中重要的组成部分,被称为机械传动中的三大器之一,使用量大、面广,涉及机械行业的各个领域,如广泛用于矿山、冶金、航空、兵器、水电、化工、轻纺及交通运输等行业。机械式联轴器大多采用刚性连接、机械力传递转矩,在如磨煤机、破碎机、输煤皮带机、压缩机等一些大转矩、振动场合极易发生破坏失效。安全联轴器虽具有过载保护功能,但仅限于极限情况下以牺牲联轴器中的元件来确保原动机和设备的安全,从而使得传动无法维持。由上可见,如何实现动力的平稳持久传递变得较为迫切。同时电机在负载启动时,在短时间内就可以达到额定转速,而转子转速则要带动负载从零逐渐达到额定转速,所以当转子转速较低时,转子中就会感应出较大的转子电流从而可能使电机迅速发热,严重时甚至烧坏线圈。如何实现电机低负荷启动、满负荷运行即软启动,成为拖动技术的重要研究课题。
针对上述种种问题,根据电磁感应原理及调速机理,笔者提出了一种新颖的可调速式异步盘式磁力联轴器[1],本文在分析该磁力联轴器结构与主磁路特点的基础上,拟采用精度较高的三维有限元分析方法,对一台9对极16槽的深槽式异步磁力联轴器进行有限元分析,研究磁力联轴器的磁场分布、电流分布情况,计算出其传动性能参数。
1 联轴器结构及主磁路特点
1.1 联轴器结构特点及调速机理
可调速异步盘式磁力联轴器结构如图1所示,它由两个普通的盘式磁力联轴器复合而成。其主动转子上布置有永磁体,永磁体轴向磁化且紧密相间排列,而在从动转子上开槽,嵌入铜导体,其铜导体内外环用薄环形铜层包起,形成封闭的感应电流回路。可调速异步盘式磁力联轴器的主动盘与从动盘不接触,当永磁主动盘运转时,从动盘导体材料因切割磁力线而产生感应电流,由感应电流产生的感应磁场与永磁旋转磁场相互作用而发生相应转动,通过调速装置调节永磁盘和铜盘的气隙长度来改变气隙磁场强度,以实现不同转矩的输出,从而实现速度可调;两盘通过气隙磁场相互作用实现转矩的传递,由于主动盘与从动盘不接触,从而可避免振动的干扰,减小传动部件的损耗;也由于主动盘与从动盘不接触,有效解决了负载与电机的分离,从而可实现电机的软启动。

图1 可调速异步盘式磁力联轴器结构
1.2 联轴器主磁路特点
盘式磁力联轴器的电磁场分布比较复杂,为轴向磁通、呈三维分布。这里,从N、S交替排列的轴向充磁永磁体结构入手,对盘式磁力联轴器的主磁路进行分析。从图1可知,该联轴器主要由两个单盘式磁力联轴器复合组成,在结构上成轴对称,因此只要分析其中一个盘式磁力联轴器即可。其主磁通从一个极出发,沿着轴向穿过气隙和与之相对的从动转子盘齿部,沿圆周经过从动转子轭部,再沿轴向穿过气隙和相邻的磁极,最后沿主动转子轭部闭合,如图2所示。

图2 磁力联轴器主磁路示意图
2 计算模型的建立
从上面分析可见,磁力联轴器的主磁场为三维轴向磁场,与传统的径向圆柱式磁力联轴器磁场分布不同[2-3],因此不能像处理圆柱式磁力联轴器那样,选取联轴器的横截面来建立其二维模型,需建立三维模型才能准确反映其磁场分布的情况[4-6]。本文在进行磁场数值计算时,进行一定的假设以简化计算过程:①铁磁材料各向同性,忽略磁滞效应,采用平均磁化曲线;②只考虑模型中与磁性相关的材料,即主动盘、从动盘、永磁体以及铜导体,其余的当作空气处理。
在上述假设的基础上建立有限元几何分析模型,如图3所示。其中,δ为气隙长度,mm,h为转子轭铁厚度,mm,h1为槽深,mm,h M为永磁体厚度,mm,R1为永磁体内径,mm,R2为永磁体外径,mm。
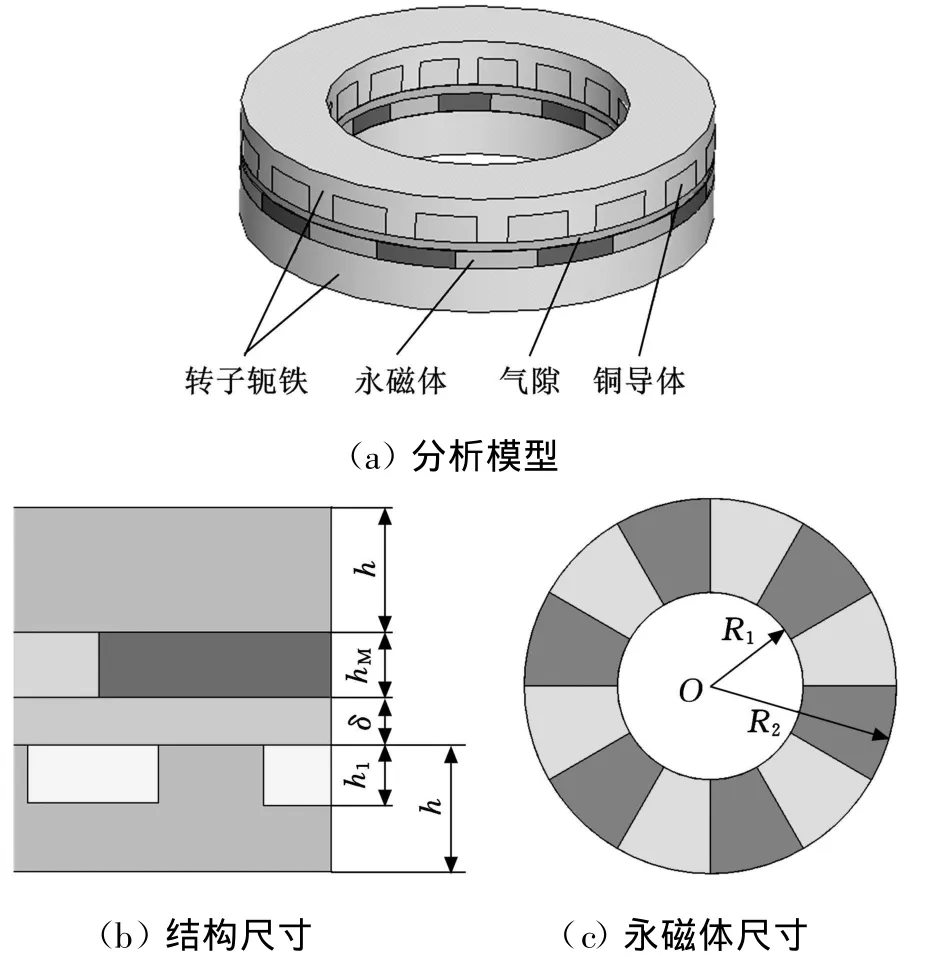
图3 磁力联轴器分析模型
在分析模型图3a中,记整个求解域为 Ω,模型的内外侧面为S1,不同介质交界面为S2,铜导体沿从动转子半径方向的侧面为S3,由麦克斯韦方程组,在 Ω区域有:

式中,▽为矢量算子;H为磁场强度,A/m;B为磁感应强度,T;J为电流密度,A/m2。
磁感应强度B可以由磁矢位A得到:

磁感应强度B与磁场强度H的关系为

由式(1)~式(3)可得
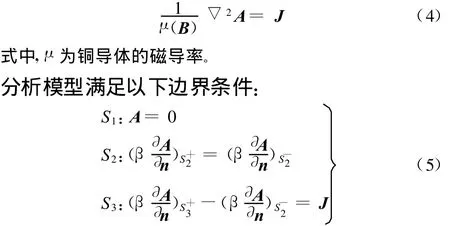
其中,β为材料的磁阻率,n为S2或S3的法线方向。对空气 ,取β=1/μ0,其中 μ0为空气的磁导率;对钕铁硼材料,取β≈1/(1.099μ0);对铁质材料,β由其磁化曲线B=f(H)确定。
将泛定方程式(4)与边界条件式(5)合在一起,构成了边值问题,即在求解域Ω内求解磁矢位A的数学模型:
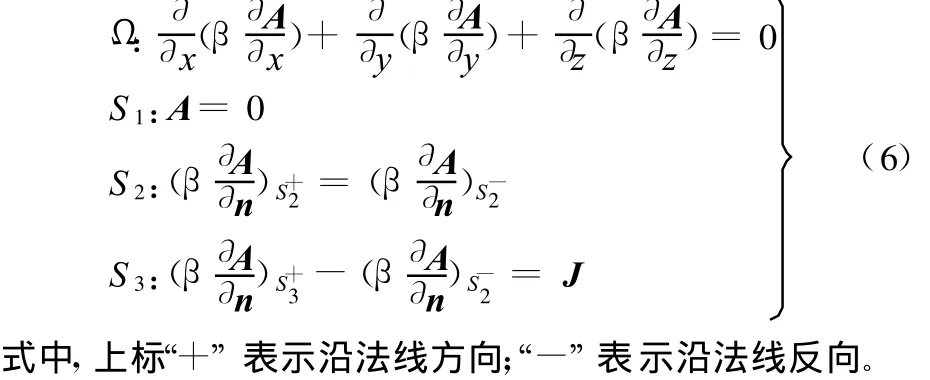
由式(6)求得A(x,y,z)后,可根据式(2)求得B(x,y,z),从而得到联轴器磁场分布。求得联轴器磁场分布后,即可求得磁力联轴器的转矩T以及磁力联轴器轴向力F,分别为
式中,V为主从动转子间气隙体积,mm3;r1、r2为铜导体内外半径,mm。
磁力联轴器的功率损耗主要由铜导体上电流发热所致,因此:
PL=I2R (9)式中,PL为功率损耗,kW;I为铜导体上电流,A;R为铜导体电阻,Ω。
3 磁场分析及性能参数计算
设磁力联轴器分析模型参数为:在一定的内外直径下,设磁极9对,槽数16,铜导体为扇形结构,夹角 15°,槽深 15mm,永磁体厚度为 10mm,主从动盘厚度为25mm。应用有限元软件Maxwell 3D进行分析。
3.1 磁场分布
图4所示为磁力联轴器静态磁场分布,图5所示为磁力联轴器负载磁场分布。从图4、图5中可以看出其磁力线走向一致,但磁感应强度并不一致,其原因是:静态时磁力联轴器没有相对转速,其磁场都是由永磁体提供,而在磁力联轴器负载时,由于主从动转子存在转速差,铜导体因切割磁力线会产生感应电流,从而会产生感应磁场,此感应磁场与永磁体提供的磁场相互叠加。在铜导体表面气隙平均半径处,建立沿周向的轴向磁感应强度的分布曲线,如图6所示,从中可清晰看到磁力联轴器瞬态工作时气隙磁场磁感应强度比静态时磁感应强度大。
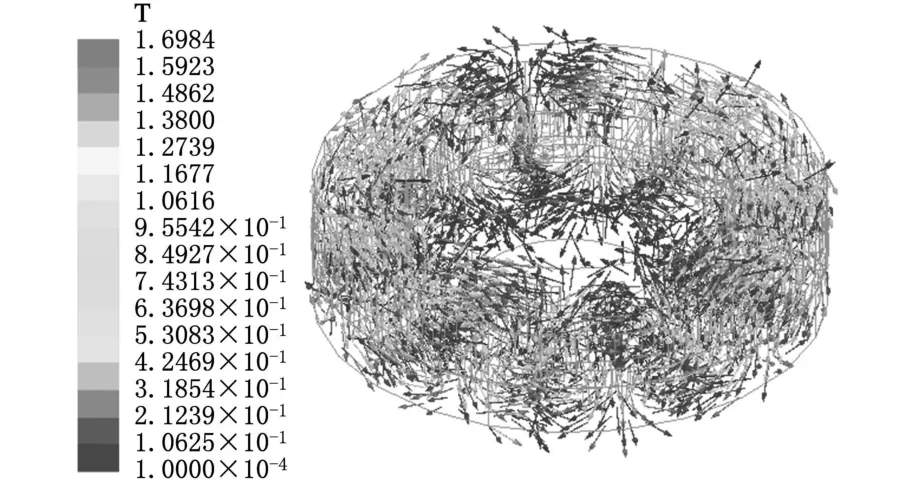
图4 静态磁场分布

图5 负载磁场分布
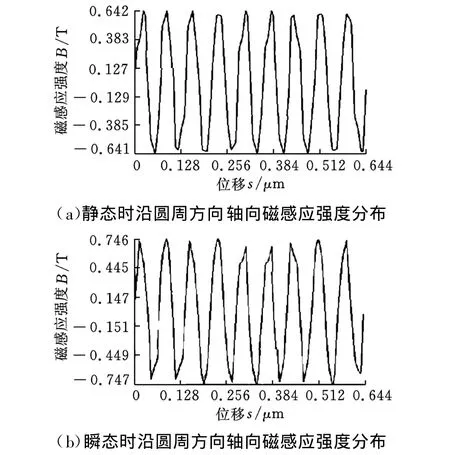
图6 磁感应强度的分布曲线
3.2 感应电流分布
磁力联轴器是通过铜导体切割磁力线产生感应电流的,通过此电流产生的感应磁场与永磁体产生的磁场相互作用来实现非接触传动,该电流影响磁力联轴器的磁场分布进而影响磁力联轴器的性能。图 7显示了磁力联轴器在转速为1000r/min,转差率为3%情况下的感应电流分布情况。从图7中可看出,磁力联轴器的感应电流主要分布在铜导体上,在从动盘轭上分布很少。这说明磁力联轴器从动转子主要的发热源为铜导体,从动盘轭上只有靠近铜导体边缘部分才对转矩传递起很小的作用。
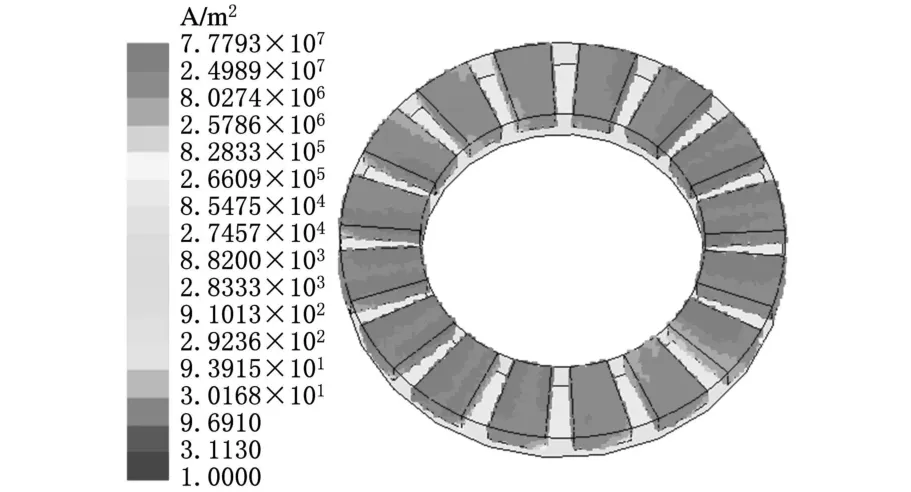
图7 感应电流分布图
3.3 转矩、功率损耗和轴向力计算
磁力联轴器主要是以转矩形式传递动力,因此转矩是其性能指标之一。图8、图9分别显示了磁力联轴器转矩和功率损耗随时间变化的曲线。磁力联轴器是利用电磁感应原理设计,其损耗主要由铜导体上感应电流产生,因此其转矩和功率损耗变化跟感应电流的变化有关。从图8、图9可知,初始阶段转矩和功率损耗先逐渐增大,增大到一定值后慢慢减小,最后趋于平稳。其原因是:磁力联轴器在初始运行时,气隙中的磁场主要由永磁体提供,此磁场可产生一个感应电流,同时此感应电流产生一个感应磁场与永磁体提供的磁场相互叠加,并在下一个时间段内产生更大的感应电流,如此反复叠加,因此在开始的一段时间内,感应电流慢慢增大,直到达到理论值时再慢慢地减小,最后趋于平稳。但对于一个平稳运行的磁力联轴器,其转矩和功率损耗的变化应该是稳定的,所以取有限元计算结果相对平稳后的数据,即取0.01s后的计算值作为磁力联轴器平稳运行时的输出转矩和功率损耗,可以得到转矩 T=19.03N◦m,功率损耗 P L=2.23kW。
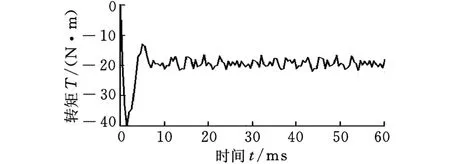
图8 转矩随时间变化曲线
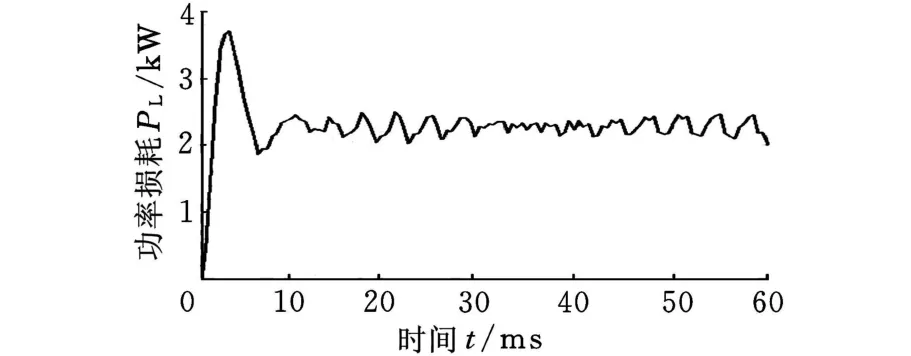
图9 功率损耗随时间变化曲线
磁力联轴器永磁体轴向磁化,因此在主从动转子间存在一个静磁场轴向吸力,且为常量,而在磁力联轴器负载运行时,由感应电流产生的感应磁场的作用,两者又存在一个排斥力,此力只有联轴器工作时才会存在,因此磁力联轴器负载运行时,两盘间的轴向力由以上两个力合成。图10显示了磁力联轴器在负载情况下轴向力随时间变化的情况。从图10知,其轴向力在一段时间内先减小,后再增大,最后趋于平稳,其原因是:磁力联轴器在启动过程中,主动转子加速到额定转速过程中,使主从动转子间转速差增大,铜导体上感应电流增大,其感应斥力也随着增大;当主动转子达到额定转速不再增加,从动转子则继续加速又使得两盘转速差逐渐减小,感应电流变小,轴向磁感应斥力又逐渐减小,当从动转子达到与主动转子设定的额定转速差后,电流大小不再变化,轴向力斥力稳定。
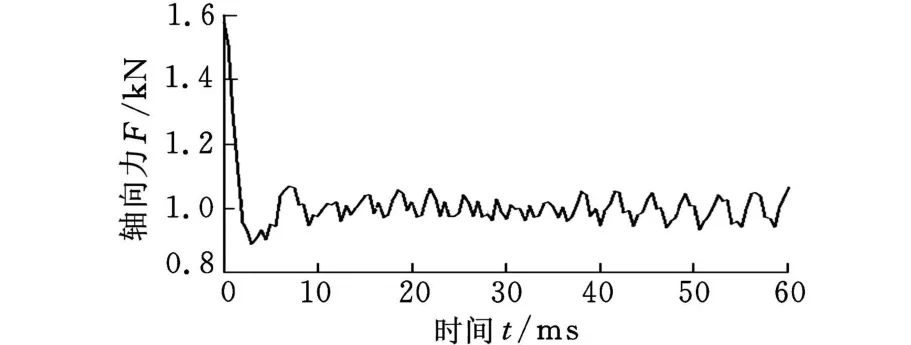
图10 轴向力随时间变化曲线
4 结论
(1)在磁力联轴器运行过程中,感应电流对磁力联轴器的气隙磁场有较大的影响,进而影响到磁力联轴器性能参数的输出,并且感应电流主要分布在铜导体上,在从动盘轭上分布较少,其发热源主要为铜导体。因此设计中,应考虑在从动盘上采取冷却措施,以降低铜导体上的温度。同时由于铜导体的内外包层起短路电流的作用,因此为避免电流过大将它烧坏,其截面积不能太小,应与铜导体最小截面积相当。
(2)磁力联轴器在启动过程中,其转矩和功率损耗先增大后减小,最后趋于平稳;轴向力先减小,后增大,在主从动转子达到额定转速差时,达到一个稳定值。其结果准确地反映了磁力联轴器的启动运行过程,为减少转矩脉动、提高启动转矩提供了依据。
[1] 杨超君,郑武,李直腾.可调速式磁感应联轴器:中国,200910263064.X[P].2010-06-09.
[2] 杨超君,马如宇,蒋生发.电磁感应式磁力联轴器及其性能研究[J].中国机械工程,2003,14(23):2010-2012.
[3] 杨超君,王晶晶,顾红伟,等.鼠笼转子磁力联轴器空载气隙磁场有限元分析[J].江苏大学学报(自然科学版),2009,31(1):68-71.
[4] Aydin M,Zhu ZQ,Lipo T A,et al.M inim ization of Cogging Torque in Axial-flux Permanent-magnet Machines:Design Concepts[J].IEEE Transactions on M agnetics,2007,43(9):3614-3622.
[5] Marignetti F,Di Stefano R,Coia Y.Analysis o f Axial Flux PM M achines Including Stator and Rotor Core Losses[C]//Industrial Electronics.O rlando,FL,2008:2035-2040.
[6] Yang Chao jun,Li Quanw en,Ma Hong liang,et al.Numerical Ca lculation of the Outer Thickness o f Doub le-solid Rotor Asynchronous Permanent Magnetic Coup ling by Finite Element M ethod[J].Materials and Product Technology,2010,39:383-390.
Per formance Parameter Calculation of Ad justable Speed Asynchronous Disk Magnetic Coup ling
Yang Chaojun Zheng Wu Li Zhiteng Li Zhibao Jiang Shengfa
Jiangsu University,Zhenjiang,Jiangsu,212013
A noveladjustable speed asynchronous disk magnetic coup ling was proposed,of which conductor on driven p late adopted a deep slot teeth shape structure.While the length of air gap between drive and driven plate is changed,the strength ofmagnetic field is increased or reduced accordingly,then its run speed adjustment isavailable.It can be used in some high pulling torque and excess vibration ofmechanicalequipment to avoid vibration,or also realize themotor soft startwhen in load.Its configuration characteristics and mainm agnetic circuit characteristics were discussed herein and a deep slot asynchronousmagnetic coup ling w ith 9 po le-pairs and 16 slotswas analyzed by three-dim ensional FEM under static and transient state,the distribution o f magnetic field and current were ob tained.The perform ance parameters of the new coup ling including torque,power loss and axial force were calcu lated,and their corresponding curves in the transient conditions were obtained.
ad justab le speed asynchronous disk magnetic coup ling;3D-FEM(finite elem ent method);transient analysis;torque
TH 133
1004—132X(2011)05—0604—05
2010—03—08
国家自然科学基金资助项目(51075189)
book=0,ebook=471
(编辑 袁兴玲)
杨超君,女,1965年生。江苏大学机械工程学院教授。研究方向为磁力机械及激光加工技术。发表论文50余篇。
郑 武,男,1982年生。江苏大学机械工程学院硕士研究生。
李直腾,男,1985年生。江苏大学机械工程学院硕士研究生。
李志宝,男,1985年生。江苏大学机械工程学院硕士研究生。
蒋生发,男,1938年生。江苏大学许士芬(香港)联合研究所所长。