基于FCMAC的空间零重力环境地面模拟装置控制
2011-01-27齐乃明张文辉高九州
齐乃明,张文辉,高九州,马 静
(1.哈尔滨工业大学 航天学院,哈尔滨 150001;2.东北农业大学 工程学院,哈尔滨 150001)
0 引言
通过零重力环境地面模拟装置来验证空间机器人的性能已成为经济有效的手段。目前模拟太空零重力环境的方式主要有[1]:自由落体运动法,悬吊法,水浮法和气浮法。
1)自由落体运动法是在高空或者近真空的落塔上令试验目标物做平抛运动(例如德国著名的不莱梅落塔),其缺点是造价昂贵、试验时间短。日本NASDA曾在零重力试验室进行过此类研究[2]。
2)悬吊法是通过吊丝的垂直拉力来平衡机器人自身重力。该方法系统复杂,吊丝易倾斜晃动,重力补偿精度不高。美国卡耐基·梅隆大学研制的SM2地面试验系统[3]采用此方法。
3)水浮法是指利用水的浮力来平衡机械臂自身的重力。该方案易受水阻力和紊流影响,且要求试验期间的密封性非常好,成本非常高。美国马里兰大学研制的Ranger试验系统[4]采用此方法。
4)气浮法是利用喷气悬浮力抵消飞行器重力,具有结构简单、承载能力大、建造周期短、费用低、易于实现、零重力模拟精度高等优点,是应用最广的方法。目前加拿大公司所开发的地面实验系统、美国斯坦福大学建造的自由飞行空间机器人系统[5]以及哈尔滨工业大学为中国空间技术研究院研制的多套空间机器人地面模拟系统采用的均是气浮方法。
飞行器运动姿态复杂,而现有的气浮法只能在水平面上进行二维仿真试验,已不能满足飞行器运动地面模拟试验的需要。文献[6]提出了一种仅用于微型机器人的气浮与气缸结合的方式,但该方案忽略了气源压力不稳及气缸本身很重的因素,大的附加重量会对空间机器人的性能测试精度产生影响,另外其采用的神经网络算法需要大量样本学习,这些都影响了工程应用价值。
本文针对以上方案的不足,研制了一种新型的三维空间零重力模拟装置。仿真结果表明该装置具有较高模拟精度和工程价值。
1 三维空间零重力地面模拟试验系统
1.1 结构设计
由于复杂的三维空间运动均可以分解为水平和竖直两个方向的运动,因此三维空间零重力环境地面模拟试验系统的结构主要包括水平和竖直两大部分(如图1所示)。该系统水平部分采用气足组件,利用气动压使整个设备悬浮于平台上。竖直方向主要由一套电机驱动系统及机械传动系统组成,并通过工作台面处的压力传感器形成一个恒力伺服系统。
试验系统主要工作原理为:气足组件为整个直推式三维升降设备提供悬浮气动力;电机接收控制器的控制信号并带动丝杠进行旋转,进而推动螺母竖直升降;导向杆与直线轴承完成微重力模拟装置的竖直导向功能,支撑杆将传感器支撑板与螺母托板固连,实现传感器支撑板与螺母托板的共同竖直升降;压力传感器用于测量压力信息,通过压力反馈实现零重力环境的模拟监测。
上述各机械传动部件均可采用标准件,并针对空间机器人结构的不同,只需更换托架接口就可以满足不同需求。
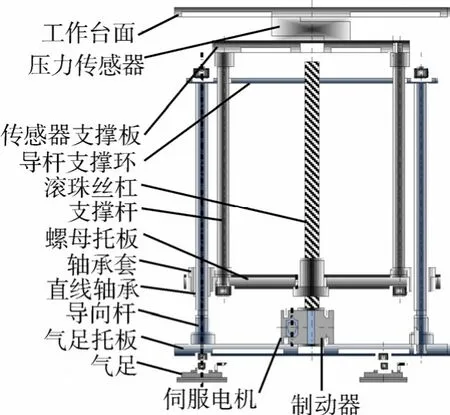
图1 三维空间地面模拟试验设备结构图Fig.1 Structure diagram of spatial microgravity simulation system
1.2 系统动力学建模
将整个机械系统、压力传感器、试件(空间机器人)都看作是由质量、阻尼、刚度构成的模型,则地面零重力模拟装置的动力学模型可以粗略地用图2表示[7]。
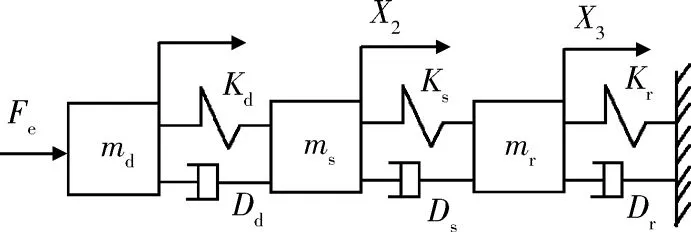
图2 力控系统动力学模型Fig.2 Dynamics model of force control system
图2所示模型的各参数定义:md、ms、mr分别为机械传动系统、压力传感器、空间机器人的质量,{Kd,Dd}、{Ks,Ds}、{Kr,Dr}分别是它们的刚度及阻尼系数,则可建立其输入/输出方程:

传感器的测量力Fs输出为

将(1)式及(2)式代入(3)式得

2 零重力模拟装置的FCMAC控制器设计
2.1 FCMAC神经网络
神经网络及模糊控制具有很强的非线性逼近能力,目前已有多种控制方法[8-9]应用于电机的解耦控制。在神经网络结构中,小脑模型关联控制(CMAC)算法是由Albus于1975年根据小脑皮层神经结构特点提出,由于其能够学习多维非线性映射,因而已被广泛应用于函数逼近、模式识别和机器人控制等许多领域。该算法简单、学习速度快,因此特别适合实时学习控制。但该神经网络算法内部知识的表达不清楚,输入状态与联想强度之间的关系无法在线调整。而模糊逻辑控制算法恰好弥补了这一缺陷,将二者结合起来可以很好地反映人脑认知的模糊性和连续性,且具有较强的自学习能力,这就是本文提出的模糊小脑模型关联控制(FCMAC)算法。
FCMAC可实现任意的非线性映射:u=f(x),其中x∈RNx为连续输入空间(Nx为输入向量维数);u∈Nu为输出空间。其工作机理为:通过对输入的模糊量化,得出输入向量激活联想强度的活性,进而激活联想强度以恢复系统的信息。图3 所示是一个双输入单输出的FCMAC结构。
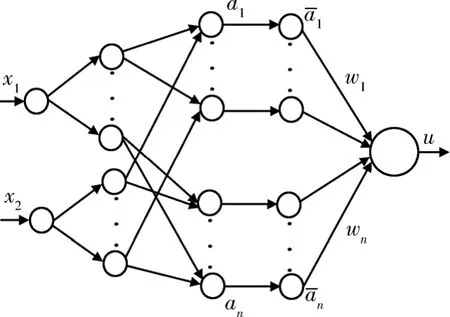
图3 FCMAC神经网络结构Fig.3 Fuzzy CMAC neural network structure
1)输入层:为第一层,其结点是输入结点,输入变量信息,并将输入的x=(x1,x2)T传送到下一层。
2)模糊化层:对输入变量进行模糊化处理,相当于模糊逻辑控制器,它的每个结点对应于一个语言变量,完成一个输入隶属函数()μijix的计算,进而实现输入变量的模糊化。
3)模糊相联层:层中每个结点为规则结点,用来代表模糊规则,该层中的连线表示执行模糊逻辑规则IF(前件)的部分,通过乘积运算得到相应的点火强度。
4)模糊后相联层:完成点火强度的归一化计算(加权平均),以便为下一层的 Takagi型模糊推理提供必要的准备。其归一化算法为

5)输出层:对于单输出情形,直接给出清晰化的输出值为
2.2 三维空间模拟地面试验装置的控制系统设计
这里不考虑传动机构及传感器与试件接触时的动态特性,只考虑力与位置的静态特性,那么基于FCMAC神经网络的地面零重力模拟装置的控制系统框图如图4所示。
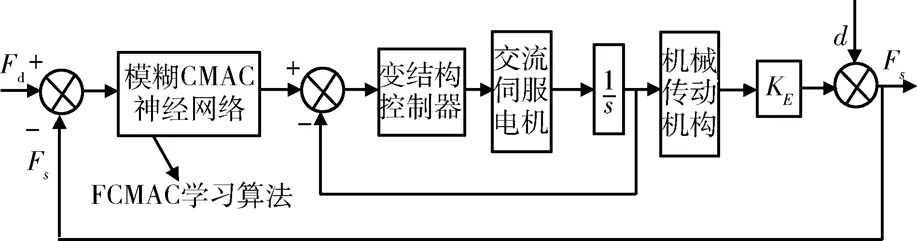
图4 地面零重力装置控制系统方框图Fig.4 Block diagram of spatial microgravity simulation control system
图中KE为环境综合刚度,KE=KsKr。考虑到永磁同步电机具有非线性、强耦合的特点以及机械传动部件的齿轮间隙的不确定性及外界干扰,为提高控制精度,内环采用响应速度快、鲁棒性强的滑模变结构控制器,外环采用快速学习算法的FCMAC神经网络的控制策略。
1)滑模变结构控制器设计

取位置环滑模切换函数为

根据滑动条件可知,当状态不在开关线上时,需满足下式成立:

则变结构控制器输出为

由式(1)及式(2)得控制器参数为
2)FCMAC神经网络力控制器设计
采用五层FCMAC神经网络作为控制器,以力误差Fe及力误差的变化率为输入,归一化处理后在[-1,1]区间;两个输入各采用9个语言变量,即负大(NL)、负中(NM)、负小(NS)、负零(NZ)、零(Z)、正零(PZ)、正小(PS)、正中(PM)、正大(PL)。
其隶属函数采用高斯函数

由于FCMAC神经网络只有输出层有加权,且只有与被激活神经元相连的局部连接权得到修正,其算法才可以采用Albus学习算法或BP算法等。针对零重力模拟装置试验目标及试验环境的不确定性,对某一系统的学习结果很难再应用于其他环境,因此在线自学习、自适应能力对零重力模拟装置很重要。
本文采用改进的有监督的Hebb学习规则,以输出偏差为监督信号,通过关联搜索进行自学习和自组织,使相应输出增强或减弱,以逼近期望输出。

上述式中:ri(k)为递进信号,随过程进行逐步衰减;z(k)=Fd-Fs为输出误差信号;η>0为步长或学习率,0≤c≤1为正常数。
联立式(13)和式(14)得

式中Δwi(k)=wi(k+1)-wi(k)。
如果存在函数fi[wi(k),z(k),u(k),xi(k)],则有

则式(17)可写成

式(19)表明:加权系数wi(k)沿着修正函数fi对应于wi(k)的负梯度方向进行搜索。应用随机逼近理论可以证明:当c充分小时,使用上述学习算法,wi(k)可收敛到某一稳定值wi*,且使期望值落在允许范围内。
3 仿真结果与分析
本系统的模拟目标为重量达1500 N的空间目标机器人,零重力模拟时间为10 s。在0~2 s时为旋转关节旋转,带动模拟目标旋转,完成平移和升降,其旋转驱动力在竖直方向的分力为f=25.0sin(2πt)N。在2 s时,目标机器人抓捕1成功,其总重量变为1950 N。整个过程受到摩擦力f2=4sin(πt)N的影响。
模糊神经网络学习参数取η=0.60、c=0.15,网络初始值及高斯值均在(-1~1)之间随机选取。Kr取8。仿真结果如下,其中图5为重力及其装置的支撑张力值,图6为张力对重力的跟踪误差值,图7为控制器输出力矩。
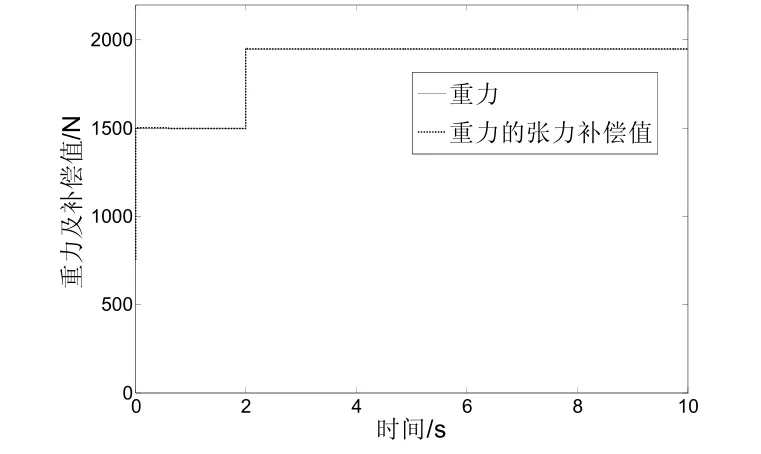
图5 张力跟踪曲线Fig.5 The tensile force tracking curve
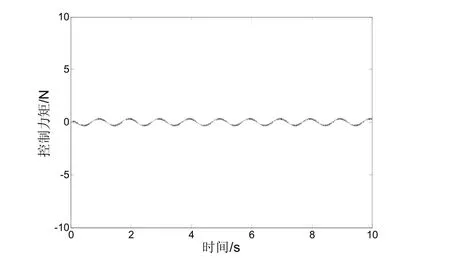
图6 滑模变结构控制器输出Fig.6 Output of the sliding model controller with variable structure
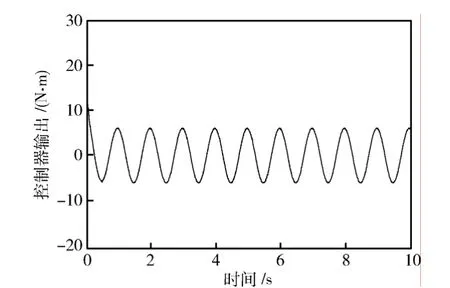
图7 模糊神经网络控制器输出Fig.7 Output of fuzzy neural network controller
由图中可以看出张力控制从初始时刻大约1 s后即达到了精确补偿重力,且初始控制误差不大;即使系统在2 s抓捕成功后,控制器能够快速响应,并达到了很好的零重力控制效果。这说明所采用具有快速动态特性的滑模控制器及具有快速学习能力的FCMAC神经网络是有效的。无论是内环的滑模控制器还是外环的模糊神经网络控制器,其整个过程控制力矩均不大。考虑到空间机器人姿态保持的需要,通常运行于低速工况,这为模糊神经网络的学习提供了时间,能够应对实时性及非线性要求。
进一步仿真发现,模糊神经网络的学习率对控制效果有较大影响:学习率增大时,收敛加快,控制效果更好,但过大的学习率会引起系统振荡。
4 结论
本文提出了一种新型的三维空间零重力模拟装置。水平方向采用气悬浮技术,竖直方向采用机电驱动的恒力控制方式来实时抵消目标的重力。考虑到永磁同步电机具有非线性、强耦合的特点以及机械传动部件的齿轮间隙的不确定性及外界干扰,为提高控制精度,同时保证控制的实时性,位置环采用滑模变结构控制器,力环采用FCMAC神经网络的控制策略。仿真结果表明了该地面零重力试验装置对于三维空间零重力环境的模拟具有较高精度,且算法简单,学习速度快,对于做复杂运动的空间机器人的零重力模拟试验具有较高的工程应用价值。
(References)
[1]史士财, 吴剑威, 崔平远, 等.空间机械臂全局反作用优化及地面试验研究[J].机器人, 2009, 31(3): 242-248 Shi Shicai, Wu Jianwei, Cui Pingyuan, et al.Global reaction optimization of space manipulator and its ground test[J].Robot, 2009, 31(3): 242-248
[2]Sawada H, Ui K, Mori M, et al.Micro-gravity experiment of a space robotic arm using parabolic flight[J].Advanced Robotics, 2004, 18(3): 247-267
[3]Nechyba M C, Xu Y S.Human-robot cooperation in space: SM2 for new space station structure[J].IEEE Robotics and Automation Magazine, 1995, 2(24): 4-11
[4]Gefke G G, Carignan C R, Roberts B J, et al.Ranger telerobotic shuttle experiment: status report[C]∥Proceeding of SPIE.Bellingham, WA, USA: SPIE, 2001:123-132
[5]Russakow J, Rock S M, Khatib O.An operation space formulation for a free-flying,multi-arm space robot[C]∥Proceedings of the Fourth International Symposium on Experimental Robotics.Berlin, Germany: Springer, 1997:448-457
[6]陈三风, 梅涛, 张涛, 等.空间零重力环境地面模拟系统的控制器设计[J].机器人, 2008, 30(3): 201-204 Chen Sanfeng, Mei Tao, Zhang Tao, et al.Design of the controller for a ground simulation system of spatial microgravity environment[J].Robot, 2008,30(3): 201-204
[7]邱志成, 谈大龙.基于加速度反馈的柔性关节机械臂接触力控制[J].机械工程学报, 2002, 38(10): 37-41 Qiu Zhicheng, Tan Dalong.On acceleration sensor- based feedback control for contact force of the flexible joint manipulator[J].Chinese Journal of Mechanical Engineering, 2002, 38(10): 37-41
[8]陈维, 王耀南.感应电机的神经网络自适应L2鲁棒控制[J].电机与控制学报, 2007, 11(3): 211-216 Chen Wei, Wang Yaonan.Neural network adaptive L2 robust control of induction motors[J].Electric Machines and Control, 2007, 11(3): 211-216
[9]曹先庆, 朱建光, 唐任远.基于模糊神经网络的永磁同步电动机矢量控制系统[J].中国电机工程学报, 2006,26(1): 137-141 Cao Xianqing, Zhu Jianguang, Tang Renyuan.Vector controlled permanent magnet synchronous motor drive with adaptive fuzzy neural network controller[J].Proceedings of the Chinese Society for Electrical Engineering, 2006, 26(1): 137-141