YNST光电导行镜机械设计*
2011-01-25程向明陈林飞柳光乾邓林华
程向明,陈林飞,许 骏,柳光乾,楼 柯,邓林华,付 玉
(1.中国科学院国家天文台云南天文台,云南 昆明 650011;2.中国科学院研究生院,北京 100049)
YNST坐落于云南省昆明市东南60 km的抚仙湖畔,是目前国内唯一的地平式真空太阳望远镜。YNST配备先进的光谱仪,可以进行太阳精细结构的光谱测量,建成后将大大促进我国太阳物理领域的发展。为了得到太阳的精细结构光谱,该望远镜的跟踪精度要求很高(0.3″/30 s、1″/10 min),仅靠码盘导行已经难以满足如此高的跟踪要求,因此采用光电导行系统以满足所要求的跟踪精度[1]。
YNST光电导行镜是光电导行系统的重要组成部分。光电导行系统的主要功能有进行光电导行;全日面太阳活动监测;参与主镜光轴校正[1]。导行镜与光电导行系统见图1。

图1 YNST光电导行系统示意图Fig.1 Illustration of the guiding system of the YNST
由图1可以看出,导行镜在光电导行系统中具有重要作用,光电导行系统的所有功能均需要导行镜的参与,导行镜光机系统的性能将直接影响光电导行系统的工作。
根据光电导行镜的功能特点和要求,本文设计了导行镜的机械结构。为确保系统的光学质量,选择了适当的定位与固定方式实现导行镜光学元件的夹持;为了克服温度变化造成离焦,采取了被动式无热化设计,保证导行镜的温度适应性,与电控稳焦相比结构简单,易于使用。对太阳辐射导致的热变形计算表明,无热化设计是有效的;镜体弯沉计算表明,镜体刚度设计结果满足系统需求。
1 光电导行镜光路与机械设计要求
1.1 导行镜光路
光电导行系统中心波长为430 nm,光学设计的理论分辨率2.5″,接近衍射极限。光电导行镜的光路见图2,图中,1、2为透镜,3为分光棱镜,4为滤光片,5为相机。
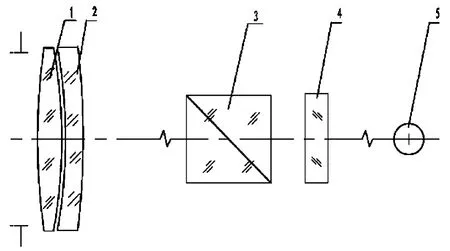
图2 YNST导行镜光路示意图Fig.2 The optical layout of the guiding telescope of the YNST
导行镜的主镜焦比为8.8,CMOS相机靶面尺寸为7 mm×10.5 mm,视场约为1°×1.5°(矩形),导行镜的光学系统与探测器经过匹配,靶面四分之一的面积(30'×45')即可满足全日面成像的要求,满足光电导行系统的要求。
为免镜筒内空气扰动影响像质,导行镜需要设计成真空镜筒,真空度参考YNST主镜真空度要求(0.1托)。
1.2 性能要求
根据光电导行镜功能特点,导行镜的机械设计应满足如下要求:
(1)保证光路的正确实现,元件的固定应当稳固可靠;
(2)环境温度变化不影响导行功能的实现;
(3)镜筒弯沉不影响光轴校正;
(4)具有指向调节功能,调节机构应便于操作,简单可靠;
(5)保证导行镜镜筒内所要求的真空度。
2 光电导行镜机械设计
2.1 设计要求分析
只有将导行镜的性能要求转化为具体的设计目标,才便于进行机械设计。
首先,元器件的夹持结构应按照光学设计给定的元件位置尺寸要求设计,并且应简单可靠;其次,温变环境可能导致系统的离焦,从而影响像质不利于导行镜功能实现,因此要从设计方案上想办法克服;再次,镜筒弯沉影响光轴校正,这要求赋予镜体结构足够的刚度以控制形变;第四,指向调节功能应连接可靠,调节简便;第五,因有真空度要求,所以设计时要考虑密封;此外,还需要考虑杂散光抑制、材料的选择等问题。
概括起来,导行镜的设计可以分解为以下几个方面:
(1)各光学元件的夹持结构设计;
(2)消热结构设计;
(3)镜筒刚度设计;
(4)指向调节机构与安装结构设计;
(5)密封设计;
(6)杂散光的抑制;
(7)材料的选择。
基于功能语言学对于语言的概念、人际和组篇三大元功能的分析,Kress & van Leeuwen将这些功能拓展到视觉图像的领域,并构建了相应的图像语法体系。 本节运用该理论对漫画1和漫画2进行重点阐释。
导行镜总体结构见图3。
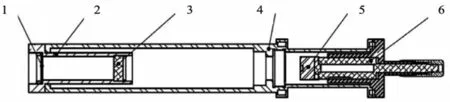
图3 YNST导行镜结构示意图Fig.3 Illustration of the structure of the guiding telescope of the YNST
2.2 密封设计
由于担心导行镜镜体内空气湍流影响像质,提出了真空镜筒的设想。因此导行镜要做真空密封设计。
对于真空密封,通常采用O形橡胶圈密封,密封结构采用平面榫槽密封面[2]。橡胶密封圈可采用邵氏硬度为55~65的丁腈橡胶或氯丁橡胶密封圈。
有资料表明[3-4],澄江观测地的年极端最高气温约33℃,极端最低气温约-2℃,给定导行镜设计环境温度为-10~40℃,因此不需特别的高温或低温密封圈。
对于导行镜,如果能够做到整体密封是最理想的,但是考虑到具体情况,不适合整体密封。CMOS相机和激光器的电缆线和数据线需要与外界相连,难以实现有效密封。而且上述两部分光路光程很短,不密封对光学性能影响较小,因此确定仅将光路的大部分也就是镜体部分纳入密封设计,密封范围见图4。
从图中可以看出,密封范围包括:主镜处、激光光路接入处、滤光片以及真空阀接口处。各处密封均采用O形圈密封。为了便于密封,需要在主镜之前和激光光路接入处增加密封窗。滤光片是平板玻璃,可以兼具密封窗的功能。
2.3 消热结构设计
随着结构体温度的变化,结构尺寸会因材料的膨胀和收缩而变化,从而引起元件的相对位置发生变化。如果位置变化较大,就可能影响光学系统的性能。
导行镜的工作温度范围是-10~40℃,加上太阳辐照造成结构温度不均匀,可能导致相机靶面与焦面严重不重合。因此要在设计时考虑适当的结构方案加以克服。

图4 YNST导行镜密封示意图Fig.4 Illustration of the seal of the guiding telescope of the YNST
由于光学系统并未针对温度变化进行设计,从可靠性与复杂程度两方面综合考虑,决定采用机械被动式无热化技术。
本文采用的机械被动式无热化机构参见图5。
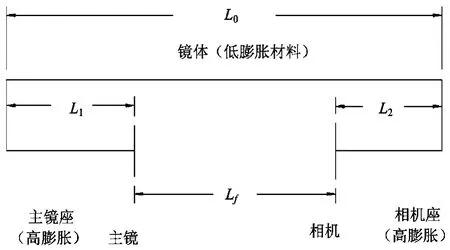
图5 无热化结构示意图Fig.5 Illustration of the structure for athermalization
欲满足温度变化时不产生离焦,需满足如下条件:

式中,L0为镜体特征长度;L1为主镜座特征长度;L2为相机座特征长度;α0为镜体膨胀系数;α1为主镜座膨胀系数;α2为相机座材料膨胀系数。
2.4 光学元件夹持设计
由导行镜光路图可知,导行镜涉及的光学元件有光学主镜、分光棱镜、滤光片、密封光窗等,此外还有CMOS相机也需要设计安装结构。激光器、激光器透镜的安装结构暂未设计,但留出了安装接口。
对光学仪器而言,光学元件的夹持应保证位置和姿态的准确。根据设计要求,各元件的安装结构设计结果介绍如下。
2.4.1 主镜夹持结构设计
导行镜的主镜为双分离透镜,两块透镜有较高的同轴度要求和间隔要求。为了便于安装,采用隔圈实现透镜间隔的确定。为了减小接触应力,隔圈两侧分别采用相切与超环面设计。透镜整体采用螺纹压圈进行固定。
2.4.2 分光棱镜夹持结构设计
分光棱镜的安装采用了半运动学的夹持方式,靠加工保证位置精度,这种安装具有一定的调节旋转能力。
分光棱镜的夹持结构见图6。

图6 分光棱镜夹持结构示意图Fig.6 Structure for the gripping of the beam-splitter prism
2.4.3 封窗夹持结构设计
封窗共有3个,分别是主镜封窗、激光光路封窗和滤光片。封窗为圆形平板玻璃,采用螺纹压圈固定,并设计有O形圈密封结构,封窗压住密封圈,实现密封功能。
2.4.4 相机安装结构设计
利用CMOS相机背后的安装螺孔,将相机固定在安装板上,再将安装板固定于座体上。
作为无热化结构设计的一部分,相机安装在矩形框架内部。同时,这种方式也有利于相机的保护。数据线和电缆线从矩形框的侧面引出。
2.4.5 激光光路安装结构设计
考虑到激光器透镜的位置需要进行调节,宜将激光器透镜和激光器另外安装,再作为整体装在镜身上。
由于激光光路暂不使用,因此仅留出了接口。在该处设计有密封光窗。
2.5 镜体刚度设计
整个导行镜的质量约23 kg,为了保持结构刚度,镜体壁厚约7 mm,矩形框部分增加了加强筋。可以保证轴线最大弯沉量小于1″。在10 min内,弯沉变化可小于0.1″,满足导行要求。
2.6 调焦机构与安装结构设计
2.6.1 调焦机构设计
对于光学系统的设计,尽管大多数参数事先已知晓,但仍有必要设计调焦机构来进行精密调焦。根据瑞利准则,导行镜主镜的焦深为:
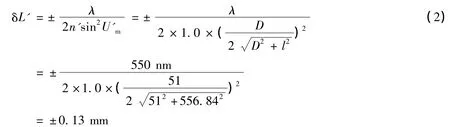
式中,δL'为焦深(单边绝对值);λ为中心波长;U'm为孔径边缘光线倾角;D为光阑口径;l为光阑到焦点距离。
因此所设计的调焦机构的调节精度值至少不大于0.13 mm。由于总体采用无热化设计,因此一个手动调焦机构便足够了。该调焦机构采用差动螺纹机构,差动机构的有效螺距为0.25 mm,调节螺母周向均布25条刻线,可实现精度不低于0.01 mm的调焦,完全可以满足使用要求。调焦机构有消隙结构。
2.6.2 安装结构设计
这里所说的安装结构,是指将导行镜安装到YNST主镜上的结构。
根据导行镜的功能,导行镜的光轴应与主镜光轴平行。采用经典的抱箍结构固定导行镜,结构简单可靠。
导行镜安装在太阳塔主镜的中间块上。这个部位是望远镜的重心和转动中心,便于安装固定。
2.7 杂散光抑制设计
为避免杂散光的影响,主镜封窗玻璃前留有较长的镜体,可起遮光罩的作用,镜筒内壁则车制消光螺纹。所有零件表面发黑处理,仅导行镜外表面涂白漆。另外,在CCD相机和棱镜座上添加了两个遮光筒,相互交错,消除可能的杂散光影响。
2.8 材料选择
根据无热化结构的需要,镜身材料用A3钢,主镜座、棱镜座、和相机安装结构采用硬铝,调节帽和调节机构轴衬为铜合金。
2.9 设计结果
导行镜的外表面涂白色漆,尽量减少对对阳光的吸收。导行镜实物见图7。

图7 导行镜实物外形Fig.7 Outside view of the guiding telescope of the YNST
经实验测试,导行镜调焦功能可靠,成像清晰。
3 太阳辐照下导行镜热变形校核
导行镜的无热化设计是基于均匀温度分布变化的情况的。但实际上,导行镜镜体的温度不可能是均匀分布的,特别是由于YNST导行镜用于太阳观测,并且导行镜具有正对太阳的突起结构,太阳辐照致热现象比较严重。因此,导行镜的镜体结构在观测过程中温度的变化远较夜天文望远镜大,且温度分布不均匀。由此产生的结构热变形,可能使成像面与焦面的相对位置发生较大偏离,产生热离焦。
YNST光电导行镜安装在望远镜主镜筒上,跟随望远镜一起运动。由于观测目标是太阳,因此观测时间在晴朗的白昼,且镜体轴线与阳光入射线平行,不工作时则被关闭的圆顶所保护。在导行镜工作的时候,导行镜前方有一个减光模块,用来衰减太阳光(衰减为万分之三)。因此光窗、主镜及镜体前端面都是受到减弱后的光线垂直照射。另外,由于镜体轴线与阳光入射线重合,镜体侧壁不会有阳光照射,而镜体中间凸起部分与镜筒轴线垂直的前表面则受到阳光的垂直入射。导行镜镜筒内抽真空。
由此可知,导行镜存在的热交换形式主要为:
(1)太阳光对导行镜的辐射(分为衰减和不衰减的);
(2)导行镜与外部空气的对流换热;
(3)导行镜与环境的辐射换热;
(4)导行镜各零部件之间的热传导。
采用集成于三维CAD软件SolidWorks环境下的COSMOSWork对导行镜的太阳辐照致热及热变形进行了计算。典型工况下(低温状态)导行镜的温度分布与热变形计算结果见图8和图9。
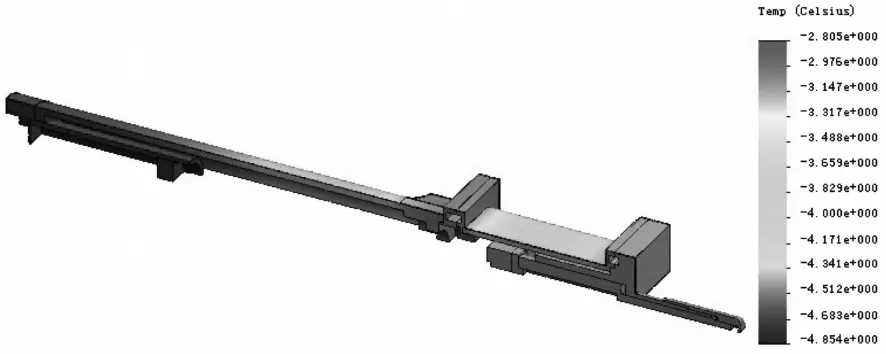
图8 低温状态导行镜体温度云图Fig.8 Thermogram of the guiding telescope near a low temperature

图9 低温状态导行镜体热变形云图Fig.9 Deformograph of the structure of the guiding telescope near a low temperature
计算结果表明,单纯太阳辐射直接造成的热变形约为7 μm,远小于系统焦深,而均匀温度变化产生的结构变形已经被无热化结构所抵消,因此不会造成热离焦,这也说明无热化设计是有效的。
4 镜筒弯沉校核
镜筒弯沉是镜体在自重作用下造成的镜体弯曲变形。镜体弯沉的结果将造成光路的畸变,影响成像质量和指向精度。由于结构及重量原因,YNST主镜筒产生的弯沉可能影响望远镜的指向精度。光电导行系统参与校正这一偏差,其中,导行镜的弯沉量比主镜的弯沉小得多,从而成为主镜弯沉的校准器。
由于导行镜在工作时其姿态在不断发生变化,弯沉量也在发生变化。当导行镜处于水平状态时弯沉量最大。一般,在一天的观测过程中,会有两次接近最大弯沉。
采用COSMOSWorks对导行镜镜筒的最大弯沉进行了计算,计算云图见图10。计算结果表明,在重力作用下,镜筒处于水平状态时的总弯沉量约为2.4 μm,相对距离约为600 mm,转角约为0.83″。
在半个观测时段(约5h)内,导行镜的弯沉从最小(接近0)变化到最大值。因此在10 min内,弯沉的变化量约为0.04″,这一结果可以满足光轴校正的要求。

图10 导行镜弯沉云图Fig.10 Deflection graph of the guiding telescope
5 结论
根据YNST光电导行镜的功能分析了导行镜的机械设计要求,并据此进行了机械结构设计。在设计中采用了机械被动式无热化结构,可消除温度变化造成的离焦。各元件的夹持结构稳定可靠。作为校核,计算了导行镜受阳光辐照导致的热变形以及导行镜的最大弯沉,结果表明设计结果满足性能要求。
致谢:在本文工作中,南京天文光学技术研究所薛俊荪高级工程师、昆明物理所张卫峰高级工程师以及成都光电所于学刚工程师曾给与支持与帮助,在此表示感谢。同时也感谢袁沭、宋佳阳和宋腾飞在本文相关工作中给予的帮助。
[1]邓林华,柳光乾,程向明,等.1m红外太阳望远镜光电导行系统的反馈控制分析[J].天文研究与技术——国家天文台台刊,2009,6(4):310-318.Dong Linhua,Liu Guangqian,Cheng Xiangming,et al.Analysis of the Feedback-Control System of the Auto Guide System of the 1m Infrared Solar Telescope of the Yunnan Observatory[J]. AstronomicalResearch & Technology——Publications of National Astronomical Observatories of China,2009,6(4):310-318.
[2]吴宗泽.机械设计师手册[M].北京:机械工业出版社,2002:1843.
[3]陆鸿宾.抚仙湖的气候特征[J].海洋湖沼通报,1981(4):1-12.
[4]楼柯,刘忠,张瑞龙,等.红外太阳塔抚仙湖老鹰地选址[J].天文学进展,2001,19(2):147-150.Lou Ke,Liu Zhong,Zhang Ruilong,et al.The Site Testing Data of Day Time Seeing and Vapor from Fuxian Lake[J].Progress in Astronomy,2001,19(2):147 -150.
[5]Veronica Povey.Athermalisation Techniques in Infra Red System[J].SPIE,1986(655):142-153.
[6]李忠.国外温度补偿自调焦红外光学系统研究的评述[J].红外与激光技术,1995(2):11-16.
[7]李娟,王英瑞,张宏.一种机械被动式无热补偿方法[J].红外与激光工程,2006,35(4):476-480.Li Juan,Wang Yingrui,Zhang Hong.New passive compensating mechanism for athermalisation[J].Infrared and Laser Engineering,2006,35(4):476-480.