自适应模糊PID控制污水处理技术研究
2011-01-22,,,
,,,
(安徽理工大学 电气与信息工程学院,安徽 淮南 232001)
0 引言
常规污水处理工艺流程具有大滞后、非线性、时变等特点,通常的控制方法难以获得满意的控制效果[1-2].实际运行过程称中常凭借操作经验进行加药等操作[3-4].本文将PLC控制和自适应模糊PID控制[5]引入到污水处理过程中,改变了污水处理中相对落后的控制方法和手段,在保证出水水质的前提下降低电耗,减少设备折旧,提高污水处理效率和效益,提高可操作和运行稳定性,实现处理流程的规范化和最优化.
1 计算机控制系统体系结构和功能
控制系统采用就地操作站与主PLC相结合的控制结构,通过现场总线技术实现各个环节通讯,提高系统安全性,实现分布式控制的目的.总体设计分为三个层次:1)中央控制室监控系统;2)现场操作站主控单元;3)分布于各个污水处理环节的自动化检测仪表及分控单元.现场主控单元通过100M冗余工业以太网与中央控制监控系统相连,各分控单元PLC自动化检测仪表采集各个设备的工作状态和现场数据并通过现场总线传送给现场主控单元,再由主控单元完成各项数据的处理、判断、PLC控制等功能并发出操作指令,同时向中央控制监控系统交换数据,中央控制监控系统能够监视各个环节的运行状态信息,并实现远程操作控制,系统结构图如图1.
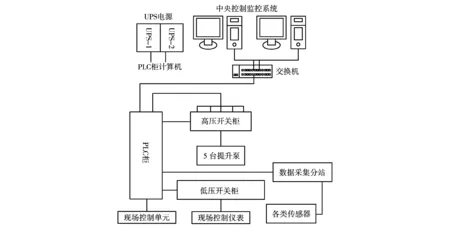
图1 污水处理系统结构图
2 重点自动化控制技术
现在污水处理要求最好能够兼顾污水处理效率和降低能源消耗.本文重点选取污水处理环节中提升泵运行控制以及污水处理工程中加药过程控制两个方面,阐述了自动化控制的运用.
2.1 提升泵控制技术
污水提升泵是污水提升的第一环节,其工作状态和性能直接影响污水处理效果.工作要求较快的工作响应能力,较强的流量适应能力,工作负荷均衡和设备自我保护能力.
传统污水处理往往只是部分设备采用较简单的自动开关甚至单纯的手工操作,并且往往只考虑液位的变化,没有考虑液位变化率,导致提升泵无法适应频繁启动和较大的污水流量波动的适应能力.为了改变这样的控制弊端,通过检测集水池液位和液位变化率,引入PLC编程控制.控制器通过采用液位差变量L;液位变化率C;和启动台数N;其中L和C为输入变量.PLC通过定时检测液位值L即时计算液位变化率并量化,然后通过PLC传递控制信号启动应该启动的提升泵台数N.通过程序判断,可以有效的防止对某些特定提升泵频繁的进行启停操作,而另外设备闲置,造成部分提升泵过分疲劳而提早磨损、报废.通过程序设定对每个提升泵进行循环启停,从而最大化均衡各台设备的工作量.具体可以通过如下方法实现:首先初始化对每台提升泵进行编号,这个编号作为启动具体提升泵的依据,依次为#1,#2,#3,…,#N并按这个顺序启动.提升泵工作时,PLC控制最后启动那台提升泵时,通过程序设置其编号为#N,其他提升泵编号依次减一,这样最后启动的的提升泵的启动次序就被设置为下一轮的最后一个启动,其他泵台依次提前一次启动次序.如此就可以较好的实现设备的均衡稳定运行,提高设备的使用效率,防止设备过度疲劳损坏.
2.2 自适应模糊PID加药控制技术
2.2.1 模糊控制器基本结构
模糊控制器是运用模糊理论,通过模糊性的语言条件实现过程控制.核心部分为模糊控制器,包括输入变量模糊化、模糊推理决策、反模糊化3个部分.图2为模糊控制器的结构图.

图2 模糊控制器的结构图
2.2.2 模糊控制
在污水处理实际过程中,影响污水处理指标有诸多因素,如:药剂溶液浓度、pH值、污水输入流量、污水水质等.通过采集污水输入流量和水质作为前馈变量,采集净化池出口水质作为反馈变量,结合污水处理工艺流程、控制要求和设备及现场情况,将复杂控制过程分解为并行工作的简单子系统.解决过程控制过程中关键技术问题,及时调剂药剂投放量及投放配比,通过模糊自整定PID参数,优化设定污水水质、pH值、药剂用量等设定值,使得检测水质参数达到排放标准,既保证出水质量,又节省运行费用.
综合控制精度、控制算法和控制稳定性要求,模糊控制器采用3个模糊变量,选取误差E(R(k)与C(k)的偏差),误差变化率EC(取E(k)域R(k-1)的偏差)为模糊控制器输入量量,选取控制量U(k)为输出变量,模糊集及论域定义如下:{NB,NM,MS,ZO,PS,PM,PB},论域{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6}.设E、EC和kp,ki,kd均服从正态分布则,可得出各模糊子集的隶属度.本控制结构为较典型的双输入单输出控制器.其模糊控制规则的形式为“IF E=… AND IF EC=… THEN U=…”,在通过总结操作人员和专家实际工作经验的基础上,结合实际工作情况可总结出多条模糊控制规则.
2.2.3 自适应模糊PID控制
通过偏差E和偏差率EC作为输入,利用上述的控制规则在线对PID进行整定,构成以E和EC为输入变量以比例系数,积分系数和微分系数(分别以kp,ki,kd,表示)为输出的双输入三输出自适应模糊PID控制.模糊控制器是根据经验和工作情况建立控制规则表的,因此PID的参数必须考虑在不同时刻kp,ki,kd的相互关系.考虑E和EC时,被控对象参数一般要求归纳为: 1)误差|E|较大时,误差的绝对值较大,不论误差的变化趋势如何,控制器的kp应该取较大值,以提高响应的快速性,为防止|EC|瞬时过大,ki应该取较小值;2)误差|E|在中等大小时,为保证系统的相应速度并控制超调应减小kp,增大ki值,kd取适中;3)误差|E|较小时,为保证系统具有良好的稳态特性,应加大kp和ki的取值,同时为避免产生振荡,kd的取值应该考虑|EC|.模糊自适应在PID算法基础上,通过计算当前系统误差E和误差变化率EC,利用模糊规则进行模糊推理,查询模糊矩阵表进行.根据各模糊子集的隶属度赋值表和各参数模糊控制模型应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数代人如下公式计算:
在线运行过程中,控制系统通过对模糊逻辑规则的结果处理、查表和运算,完成对PID参数的在线自校正,工作流程图如图3.

图3 参数自校正流程图

图4 自适应模糊PID控制仿真图
2.2.4 系统仿真
为了比较传统PID控制和自适应模糊PID的调节性能,利用MATLAB中的Simulink和Fuzzy工具箱,对控制对象进行仿真(图4).由系统辨识得到近似模型为一个二阶大滞后系统,用传递函数近似表示为:
按ITSE原则进行参数优化后,通过系统仿真可以看出传统PID控制器超调量为18.5%,调整时间为410s,而自适应模糊PID没有超调,调节时间为110s.自适应模糊PID控制药明显优于普通PID控制,达到系统设计的要求,能够有效地利用于污水处理控制,提高生产效率.
3 结束语
本文将自适应控制、模糊控制和PID控制结合起来,设计出新型的自适应模糊PID控制,并用于污水处理系统,MATLAB仿真结果表明本文所涉及的控制器,超调量小,调节时间短,动态性能好,明显优于传统PID控制;并且优于采用提升泵的负载均衡控制有效的减少了机械疲劳,延长电气设备的寿命,有效了提升了污水处理的效率和效益.
[1]李自强,薛美盛.用于PID参数自整定的性能指标仿真研究[J].自动化与仪表,2009,24(2):30-33.
[2]Tao C W,Taur J S.Robust fuzzy control for a plant with fuzzy linear model[J].IEEE Trans Fuzzy Syst,2005,13(1): 30-42.
[3]林勇坚,莫胜撼.基于PLC的模糊控制在污水处理中的应用[J].广西轻工业,2008 (5):53-54.
[4]张玉艳,邓玮,韩希昌,等.模糊预测控制在循环水加药控制中的应用[J].工业水处理,2008,28(11):83-85.
[5]诸静,孙流芳.模糊控制原理与应用[M].北京:机械工业出版社,1995.