剖析滑撑的 “滑动双摇杆机构”轨迹
2010-10-31邵百成刘学林
邵百成 刘学林
单、双支点滑撑大量用于建筑外窗。产品技术的精髓与关键——三角头机构,很多初识者对此认识不全面,个别测绘的图纸的零件尺寸明显违背摇杆机构存在的条件;忽略了滑撑在开启初期某一小角度范围内存在自锁现象。
本文以产品实例对滑动双摇杆机构的轨迹再现及约束条件进行分析,对三角头机构、辅助摇杆的作用及自锁的现象进行分析,抛砖引玉,与同行业者深研、优化、改进、创新。
一 、滑动双摇杆机构轨迹再现
1.滑动双摇杆机构存在的几何条件
滑动双摇杆机构是由六个杆件铰接和一个滑动链连接所构成,是属于六个转动副一个滑动副组成的封闭运动链。长摇杆支点是固定的,短摇杆和辅助摇杆为滑动支点。
该机构主动杆是悬杆c(图1),悬杆c上的O3、O4两个支点分别与长摇杆b上的O3点和短摇杆d上的O4点铰接,构成一个悬杆。平开窗的活动窗扇与悬杆固定在一起。短摇杆d的另一端与滑块e上的O5铰接,辅助摇杆的一端铰接在滑块e的O6点,辅助摇杆的另一端与长摇杆的O2点铰接。滑块e滑动连接在固定机架a的导槽内。长摇杆的末端铰接在机架a的O1点,这就是以悬杆为主动杆的滑动双摇杆机构。图2是图1重合时的剖面图。
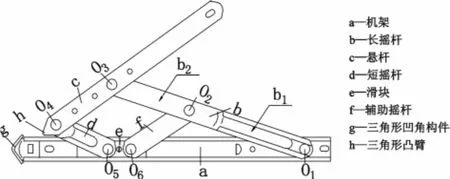
图1

图2
假如在图3中不安装三角头机构时,悬杆c最右端在一外力P作用下 (图3)绕O4点作回转运动。按几何学观点,各杆件尺寸必须满足下述条件,当滑块e上的O5、O6点距离远小于短摇杆d时:
(1)b2、c、d、e、f五边形中其杆长的向量值为:
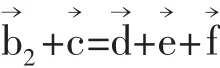
(2)bcdea四边形和其内的三角形b1fa中,杆长的向量值为:
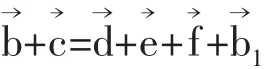
(3)图2各杆件成一直线,重合在机架a上时,杆件长应满足:
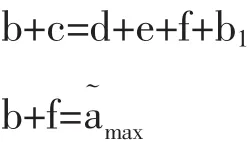
(4)设O1与O2间距为a軇,是变化的,其变化值为导杆行程Δ:

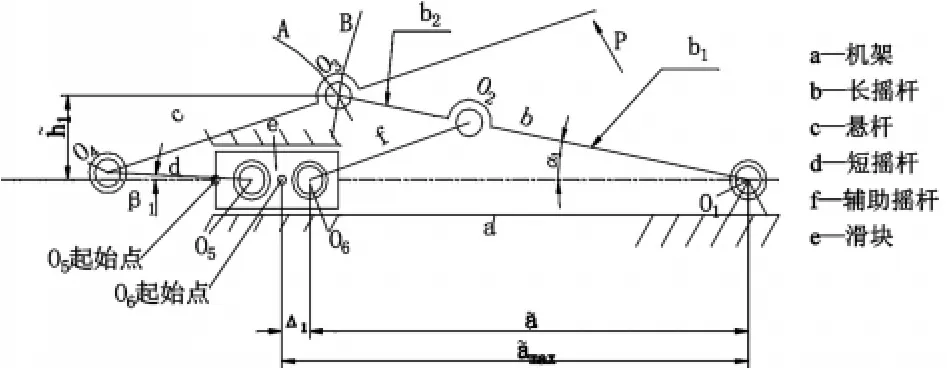
图3
2.窗扇 (悬杆c)开启过程中各杆在三个位置轨迹的再现
窗扇开启的初始阶段的变化状态在图3之前的状态和在图3、4、5的各α角度下各杆件位置,图3之前状态是杆c右端在外力P作用下开始回转一微小角度。这时c杆的O3点带动长摇杆b以O1为圆心O1O3为半径顺时针转一个微小角度α;此时b杆上的O2点带动f杆反时针转一个微小角度形成一个O1O2O6三角形。使得:a軇=f軆+b軋1故滑块e向动右移动Δ距离,同一时间,O4点也右移同等量的Δ,d杆以O5为圆心顺时针微微转一小角β(这是图3之前微动的状况)。在力P继续作用下如图3,c杆小幅度转动,c杆以O4为圆心以O3O4为半径反时针旋转画一弧A,此时b杆被c杆带动,以O1为圆心O1O3为半径顺时针旋转画一弧B,二弧交点O3即为二杆铰接点的轨迹位置。O3点到机架a的变化值为h軌1。由于b杆的旋转又带动辅助摇杆f以O2和O6为圆心以O6O2为半径反时针旋转,使滑块再右移到Δ1,从图3可以看出此时:

故O6点右移小段距离为Δ1。由此可知各杆的轨迹是以各杆上铰接点互为瞬时圆心而转动,瞬时圆心是随杆件角度变化而变化的。此时有一自锁现象出现 (后面再阐述)。
c杆在加大的力P连续作用下突破自锁区 (下边阐述)后,以O3为支点一边随铰接点O4为圆心反时针旋转,一边带动b杆顺时针绕O1点旋转,α角增大到α2,三角形O1O2O6中底边a軇再度缩小,O5、 O6再向右移, a軇=a軇max-Δ2, 其轨迹状态如图 4。窗扇处于半开状态,d杆与a的夹角为β2。由于c杆再继续反时针回转运动,滑块e进一步右移,d杆的β2角增大到图5的β3,则b杆的角α增加到图5的α3,此时O3点至e杆的垂直距离h軌3值也由于d+c投影距离的增加而增加,h軌3达最大值,悬杆则处于开启最大值近90°(近似垂直a)位置。至此完成预设的运动轨迹,终点是滑块最大行程:

3.c杆开启初期的自锁现象
如图3,在c杆开启运动的初始,正如此前所诉,滑块e向右移动距离Δ1,d杆 O5除移动 Δ1外,还顺时针转动了一个微小角度β1此时出现P力不能使c杆带动b杆顺时针转动也不能使b杆顺时针或反时针转动的自锁现象。在机械原理中自锁条件是机械效率等于零。现从几何观点也可证明该机构的自锁,条件是c杆反时针转动促使d杆的O4点受向下的力而反时针转动 (当然更不可能使d杆顺时针转动)可是不能反时针转动的原因是因为c杆的O4点以O3点为圆心转动的轨迹与d杆的O4点挠O5点为圆心转动轨迹交叉于一点 (图6)之故。而该机构的正常工作条件是使d杆的O4点顺时针转动,条件是滑块e在右移,增大β、α角这时作用在d杆O4点上的力能分解出一个分力促使d顺时针转动;当转动被 “卡住”自锁时,可将作用力P的方向指向斜右上方,d杆的O4点、b杆的O2点同时产生顺时针方向的作用力可使d杆b杆顺时针转动,自锁可解除而能正常工作。此外在O4点外加一个向上的小的F力,同样可以解除自锁。
4.不设置三角头机构滑动双摇杆机构的轨迹是自由的
从各杆件重合处在一条直线时 (窗扇关闭状态)开始,当对本机构的悬杆c无约束的话 (无三角头机构时),c杆在P力或力偶M (P)作用下,会出现如图7那样情况,c杆以O3为圆心反时针转,d杆以O5为支点,向水平机架a的下方反时针旋转到O4新位置,当P力继续作用下去其轨迹如图8,d杆绕到水平机架a的下方。杆c随O3、O4支点而作回转运动成垂直状态。这种运动轨迹与预设的在机架a的上方且垂直机构a的轨迹根本不同。为达到预设轨迹的目的首创者巧妙地设计出将三角头机构作为约束条件使滑动双摇杆机构实现平开窗启闭的要求 (图1)。
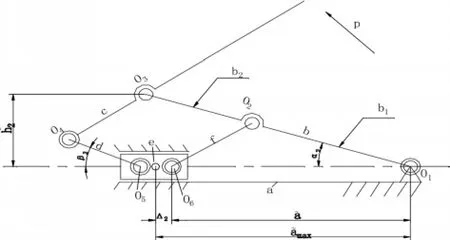
图4
图5 A (双支点)
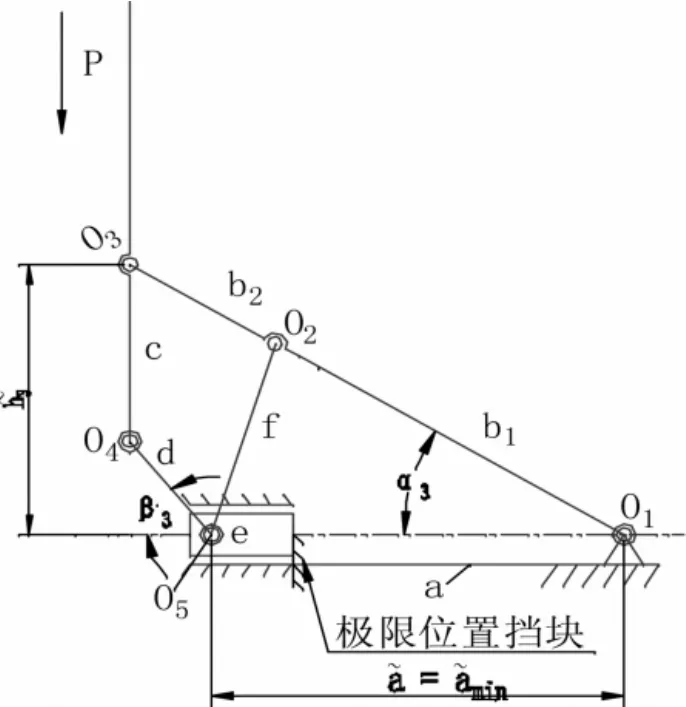
图5 B (单支点)
二、三角头机构帮助滑动双摇杆机构实现初始阶段的正常轨迹
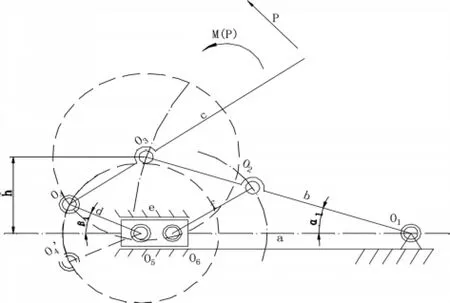
图6
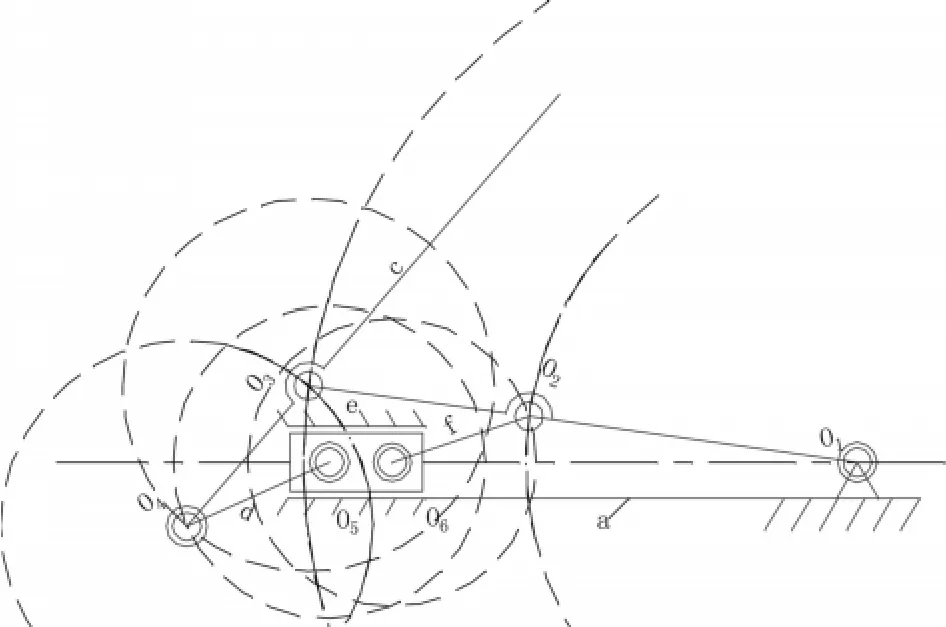
图7
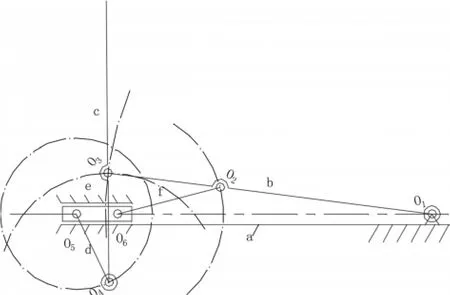
图8
三角头机构由两部分合成。一部分叫做凹角构件,凹角角度为124°左右将其固定在机架a的左端。另部分把杆c上的O4点左端头做成三角形的凸臂,角度约78°左右。当滑动双摇杆机构的各个杆件重合在机架a上时,使杆c的左端三角凸臂靠在凹角构件的凹角中心顶部 (见图2)。
1.三角头机构在开始启动初期,能阻止图7中c、d交点O4反时针向下转动如图9左端,从图3之前状态开始到图9过程,c杆在外力P作用下产生力矩M (P)是反时针方向。当c杆的三角形凸臂与凹面角构件下边在Ox点接触后,抬高了O4点,点产生了一个β1角,与此同时c杆上O3点带动b杆产生一个α1角,O2点带动f杆反时针转动形成三角形O1O2O6(见图9)。则有:
由此可知a軇<f+b1, 滑块 e被 f带动右移 Δ1距离,此时产生自锁现象,c杆不再转动,用手板动c杆很费力。如一、3所述,一旦解除自锁后c杆会带动各杆转动使α、β角扩大到α2、α3,β2、β3(图4、图5)完成滑动摇杆机构 (滑撑)的开窗程序此时滑块 e 行程为 Δmax=a軇max-a軇min悬杆 c (窗扇)从 0°变到 90°(图 5)。
图9
2.当关闭开平窗时,要保证窗扇与窗框的密封条平行接触均匀压紧,保证窗户的气密性,三角头机构也起到了关键作用。因关闭窗扇时,密封条被压紧后对c杆产生一个反作用力,方向为水平机架a的上方。此时与窗扇固定在一起的悬杆c的左端受一个向外开的力,这个力相当于在图9的F力。如果没有三角头机构时会使悬杆c顺时针转动离开窗框造成窗扇左侧密封不良而漏气;如果有三角头机构时,关窗时c杆上左端的三角形凸臂会沿凹角构件凹角上方的一个边逐渐滑入使凹角与凸角靠上。这时窗扇压紧密封条对c杆产生的反力向外,c杆的三角形凸杆被凹角构件挡住不能反时针旋转而被打开。因此保证了气密性的可靠性能;同样道理假如没有三角头机构时,在窗扇 (c杆)的左边用扁平工具就会撬开平开窗。当有三角头机构后,c杆 (窗扇)会被三角头机构凹角边上边卡住,所以三角头机构的防撬功能是非常大的。
三、辅助摇杆f的作用
1.在图1装配图中如果去掉辅助摇杆f后,就成五个连接杆机构组成的滑动四边形机构。是一个非稳定的机构 (如图10a到图10e)。当滑块e在机架a上可滑动时,这个四边形虽然可以达到杆c垂直于机架a,平开窗打开窗扇成90°的目的如图10b时的状态,但只要在c杆上 (图10b)上加一个平行c杆的力P,则四边形机构就会使短摇杆d绕O5支点反时针旋转,长摇杆b也会绕O1支点反时针旋转,因悬杆必然随O3O4的轨迹变动而回转到机架a的下方 (图10c、d、e),不是预设平开窗的保持90°,O4不向下移动功能要求。

图 10 (a)
图 10 (b)
图 10 (c)
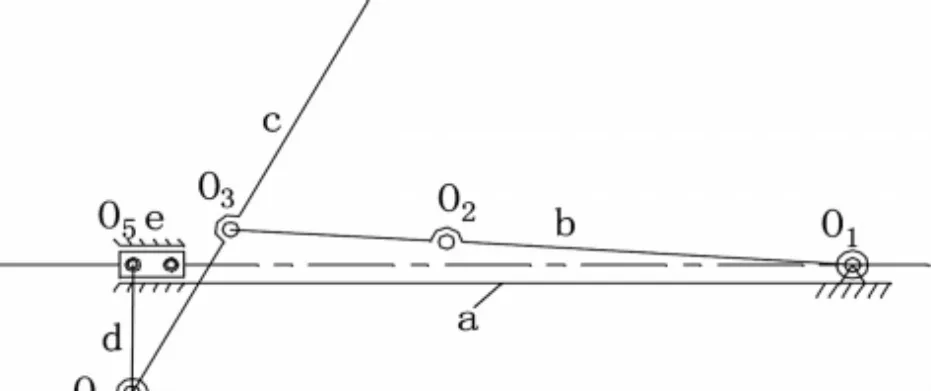
图 10 (d)
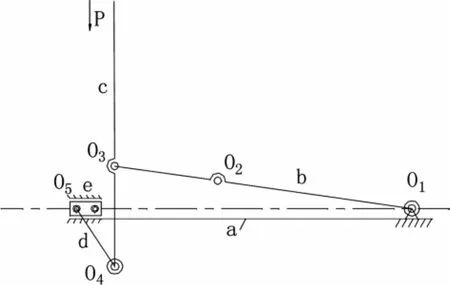
图 10 (e)
2.辅助摇杆f的作用。在图10a的五杆组成的四悬杆机构上恢复b杆支撑腰在d杆的O4点不下沉e杆上铰接的辅助摇杆f后,恢复为图1、图3、图5那样的滑动双摇杆机构的正常轨迹支撑杆d的O4点不下沉。就可以看出是f杆起控制稳定轨迹作用。
3.f杆的垂直自锁作用是平开窗上悬窗在垂直状态 (图5)沿c杆长度方向的向下外力P作用到d杆,使d杆有绕O5反时针旋转的趋势。b杆也有被c杆交点O3带动以O1为支点反时针旋转的倾向,但是辅助摇杆f近似垂直于机架a上的受力P也垂直机架有f杆支撑d杆O4点不会转动下沉,因此整个滑动双摇杆机构就产生垂直自锁稳定平开窗在开窗状态。
四、窗用滑撑存在的缺点
滑撑普遍存在初始阶段的自锁问题,虽然不影响使用,但总不算完美。按照三角头机构的作用机理对杆件尺寸进行优化设计,可以解决这个问题。
另外平开窗滑撑的下沉悬臂弯曲变形是一个严重问题。解决的难度非常大。产品在工程使用中,只要出现此类质量问题现象,必严重降低产品的使用寿命,影响产品功能的有效达成。
目前市场上和工程使用中出现时,虽然有些应对的方法,但都是治标不治本。彻底解决的难度在于窗结构尺寸要求限制了滑撑的杆件必然是板条状,板条件其惯性矩非常小,这是抵抗重力产生的悬臂弯曲变形主要因素;另外的因素就是铰接结构的磨损,以及杆件冲压加工过程中产生的残余应力,影响抗弯曲变形及蠕变变形。
解决,来源于科学的分析和认知。
因此,对产品的深度研发和科学性的发展,是每一个在市场上受尊重企业永不停息的价值延续。