一种机器人仿生气味源定位策略
2010-10-22路光达张明路
路光达,张明路
(河北工业大学 机械工程学院,天津 300130)
近年来,利用移动机器人和气体传感器实现气味源定位(gas/odor source localization)已经成为了一个研究热点.具有嗅觉功能的机器人能够从事与气味相关的各个领域的工作,包括探测地雷、搜寻爆炸物、搜救遇难者、有毒气体检测、火灾报警、检测各类危险化学物质存储容器或输送管道的泄漏情况并进行修补,还可以进行探矿工作.实际上,机器人嗅觉任务最关键的问题就是要对味源进行搜索、定位、识别.
机器人通过跟踪烟羽便可找到味源,所谓烟羽,是指气味源释放的气味分子在空气中传播形成的羽毛般的轨迹[1].Hayes[2]将此类问题分解为3个子任务,即烟羽发现、烟羽横越、气味源确认.早在1991年,Rozas等[3]便利用研制的人工鼻进行了这方面的研究.将人工鼻装在一个移动机器人上,通过追踪测试环境中的气体浓度而找到气味源.类似的研究通常是在移动机器人上安装一对气体传感器,比较两个传感器的输出,令机器人向着浓度高的方向移动[4].但由于受湍流作用,气体扩散过程中的浓度分布不规则,因此机器人只利用气体浓度梯度搜索效率低.为了解决此问题,Ishida[7]和他的同事根据飞蛾逆风跟踪信息素的行为,采用4个气体传感器和4个风速传感器制成了气味方向探测装置,充分利用气味信息与风向信息完成味源搜索.在此基础上,他们又研究了一些新算法[8-9],通过沿着浓度梯度搜索烟羽和沿着风向跟踪烟羽两种策略的转换实现定位.Pyk[10]研制了一个装有六阵列金属氧化物气体传感器和风向标式风向传感器的移动人工蛾,并利用它在风洞中模拟了飞蛾横越风向和逆风而上的跟踪信息素的运动方式,能够寻找到距离4m远处的1味源.近年来,Marques[11-12]和Loutfi[13-15]也在利用移动机器人研究味源定位领域取得了较大成果.
动物的气味搜寻行为简单而有效,在动物漫长的进化过程中,嗅觉作为最原始的感觉功能之一,是许多动物赖以生存的最重要的本领.因此模仿生物的嗅觉行为,研究机器人主动嗅觉技术,具有深远的实践和理论意义.
目前,此类研究大部分还是在特定的室内实验环境中进行的,一般设定较小范围的实验场地、营造人工风场,诸多气味源搜索及确认算法虽有其独到的一面,但大多所用的方法大都是根据动物的趋风性(amenotaxis)、趋化性(chemotaxis)、以及Z字形搜索等行为,模仿或启发的一些搜索算法,这些算法都存在效率较低、准确率低、风向依赖等缺陷.为了提高搜索效率及准确率,提出了基于扁形虫动态刺激反应和生物趋激性仿生行为的机器人气味源定位算法,并在仿真实验中验证了该搜索策略的有效性,快速性和不依赖风向和气味绝对浓度的特点.
1 基于动态刺激反应和趋激性仿生行为的机器人味源定位算法
1.1 仿生原理
很多的动物通过跟踪烟羽寻找味源(食物或异性),但并不测算平均浓度,例如蛾子一边运动一边用触角探测周围气体,没有足够时间来获得某点浓度均值.这说明存在一些方法,通过获取烟羽中瞬间的信息即浓度变化率来寻找到味源.
动态刺激反应(kinesisresponse)[16]:这是扁形虫(flatworm)的一种趋光反应机制,扁形虫相比光强度大的地方更喜欢黑暗一些的区域,当光强度增加时,它会增加它的转向率,而且不直接依赖当前的光的绝对强度,而是光强度的变化率,光强度变化越快,其转向率也越大,更快的趋向更暗的区域.
趋激性(Tropotaxis)[17]:趋激性机制是动物通过同时比较两个或多个传感器而产生对一个与浓度梯度相同或相反的方向瞬时估计,利用空间分布的两个或更多的传感器检测气味,是十足甲壳类、飞行类昆虫、爬行类昆虫追踪气味常用的刺激趋应性机制.这在湍流烟羽追踪时非常有用[18-20].
1.2基于扁形虫动态刺激反应和生物趋激性仿生行为的味源定位算法
扁形虫动态刺激反应是典型的不依靠绝对强度的生物趋性行为.在当光强度增加时,它会增加本身转向率,而且不直接依赖当前光的绝对强度,而是光强度变化率,光强度变化越快,其转向率也越大,更快趋向更暗的区域.趋激性机制是动物通过同时比较两个或多个传感器而产生对一个与浓度梯度相同或相反的方向瞬时估计,根据此仿生原理检测两个位置的浓度变化差作出方向估计.根据动态刺激反应行为,提出一种结合趋激性行为的仿生味源定位算法,不依靠传感器绝对浓度,提高机器人的搜索效率,并可以不依赖于风向.

算法的机器人步长和转角根据浓度变化率实时改变.该策略非常简单,不通过高级智能策略,不依赖风向,搜索时不依赖于气体浓度值,可以避免当前气体传感器恢复时间过长的缺点,提高了机器人的搜索效率.
2 仿真实验
2.1 气体扩散模型及参数影响分析
目前气体传播模型有:GAUSS模型[21],BM模型[22],Sutton模型[23],FEM3模型[24],采用应用最多的GAUSS模型,该模型适用于点源的扩散,早在五、六十年代就已被应用.GAUSS模型是从统计方法入手,考察扩散质的浓度分布.其中烟羽模型(Plume model)适用于连续源的扩散,烟团模型(puff model)适用于短时间泄漏的扩散(即泄放时间相对于扩散时间比较短的情形,如突发性泄放等).采用烟羽模型,高斯烟羽模型的浓度分布公式如式(1)


图1 高度变化的XY平面内气体浓度高斯分布图Fig.1 Gauss concentration distribution with changed height in the plane

图2 风速变化的XY平面内气体浓度高斯分布图Fig.2 Gauss concentration distribution with changed wind speed in the plane
2.2 仿真实验

机器人起点设在(7,0)点,因为是仿真环境中气体扩散是连续烟羽,因此第1步浓度检测值3.2 mg/s,机器人检测到气体开始跟踪,没有执行随机搜索.机器人所走路径如图3,经过19步迭代,由图4传感器浓度采样值可知,第19步气体浓度为53mg/s,由图5气体浓度变化率知,第19步浓度变化率为0.085,共有16步的变化率大于0.1,其步长最终为0.02 m,满足停止条件,机器人停止搜索.
图3所示机器人路径显示机器人较快的趋向浓度最高区域,体现了算法效率.
图4的气体浓度体现了机器人一直向高浓度区域搜索前进,与其气体GAUSS分布模型的浓度变化趋势基本一致.这表明在仿真环境下,算法能很好满足气味跟踪任务,机器人可以有效地找到味源.
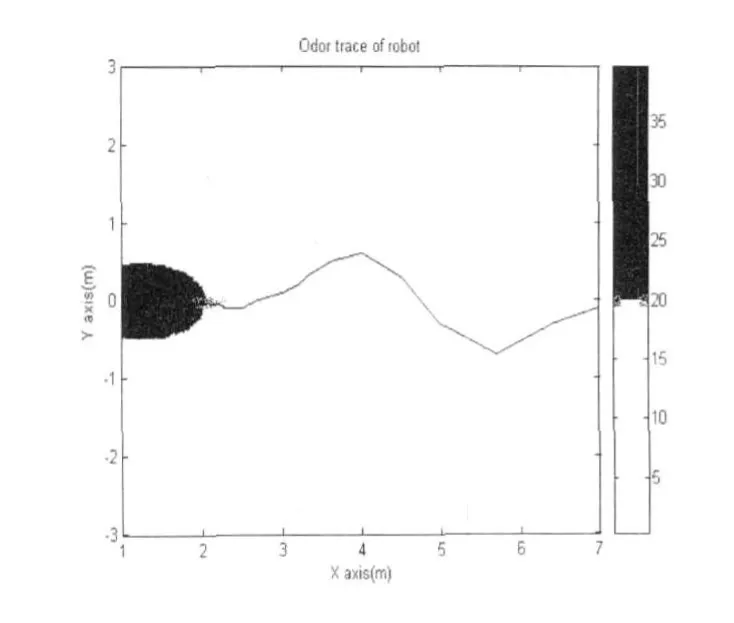
图3 机器人跟踪烟羽路径Fig.3 The trace of robot tracing odor plume

图4 机器人气体传感器浓度值Fig.4 The concentration of robot odor sensor

图5 机器人气体浓度变化率Fig.5 The variation of robot odor concentration
3 结论
在基于基于扁形虫动态刺激反应和生物趋激性仿生行为的基础上设计了一种机器人味源定位算法,使机器人可以在未知环境中自主规划进行味源搜索定位;避免了以往主动嗅觉策略容易陷入局部高浓度点而误判的情况,具有搜索效率高,不依赖气味绝对浓度和风向信息的特点.在未来的工作中,继续改进,增加障碍物,设计鲁棒性更强的主动嗅觉策略,在真实的湍流环境中能够完成气味源定位任务.
[1]PayneT L,BirchM C,KennedyC E J.Mechanisms in Insect Olfaction[M].New York:Oxford University Press,1986.
[2]HayesA T,Martinoli A,Goodman RM.Distributed odor source localization[J].IEEE Sensors Journal,2002,2(3):260-271.
[3]Rozas R,Morales J,Vega D.Artificial smell detection for robotic navigation[A].Fifth International Conference on Advanced Robotics[C].Piscataway,NJ,USA:IEEE,1991,1730-1733.
[4]Consi T R,Atema J,Goudey C A,et al.AUV guidance with chemical signals[A].Proceedings of the IEEE Symposium on Autonomous Underwater Vehicle Technology[C].Piscataway,NJ,USA:IEEE,1994,450-455.
[5]Kuwana Y,Shimoyama I,Miura H.Steering control of a mobile robot using insect antennae[A].Proceedings of the IEEE International Conference on Intelligent Robots and Systems[C].Piscataway,NJ,USA:IEEE,1995,530-535.
[6]Sandini G,Lucarini G,Varoli M.Gradient driven self-organizing systems[A].Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems[C].Piscataway,NJ,USA:IEEE,1993,429-432.
[7]Ishida H,Suetsugu K,Nakamoto T,et al.Study of autonomous mobile sensing system for localization of odor source using gas sensors and anemometric sensors[J].Sensors and Actuators,A:Physical 1994,45(2):153-157.
[8]Ishida H,Nakayama G,Nakamoto T,et al.Controlling a gas/odor plume-tracking robot based on transient responses of gas sensors[A].Proceedings of the IEEE International Conference on Sensors[C].Piscataway,NJ,USA:IEEE,2002,1665-1670.
[9]IshidaH,Nakayama G,Nakamoto T,et al.Controlling a gas/Odor Plume-tracking robot based on transient responses of gas sensors[J].IEEE Sensors Journal,2005,5(3):537-545.
[10]Pyk P,Bermúdez IBadia S,Bernardet U,et al.An artificial moth:Chemical source localization using a robot based neuronal model of moth optomotor anemotactic search[J].Autonomous Robots,2006,20(3):197-213.
[11]Marques L,Nunes U,De Almeida A T.Olfaction-based mobile robot navigation[J].Thin Solid Films,2002,418(1):51-58.
[12]Marques L,Nunes U,DeAlmeida A T.Spread Nose:Distributed a gents for environmental monitoring[A].Proceedings of the International Workshop on New Developments on Sensors for Environmental Control[C].Singapore:World Scientific Publishing,2003,234-238.
[13]Loutfi A,Coradeschi S,Karlsson L,et al.Putting olfaction into action:Using an electronic nose on amulti-sensingmobile robot[A].Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems[C].Piscataway,NJ,USA:IEEE,2004,33-342.
[14]Loutfi A,Broxvall M,Coradeschi S,et al.Object recognition:new application for smelling robots[J].Robotics and Autonomous Systems,2005,52(4):272-289.
[15]Loutfi A,Coradeschi S.Smell,think and act:A cognitive robot discriminating odours[J].Autonomous Robots,2006,20(3):239-249.
[16]Frankel GS, Gunn DL.The Orientation of Animals:Kineses,Taxes and Compass Reactions[M].New York:Dover Publications Inc,1961.
[17]FRANK W,GRASSO.Invertebrate-Inspired Sensory-Motor Systems and Autonomous,Olfactory-Guided Exploration[J].Biol Bull 2001,200:160-168.
[18]Beglane P F,Grasso F W,Basil J A,et al.Far field chemo-orientation in the American lobster,Homarus americanus:effects of unilateral ablation and lesioning of the lateral antennule[J].Biol Bull,1997,193:214-215.
[19]Srinivasan M V,Zhang S,Chahl J S.Landing strategies in honeybees and possible applications to autonomous airborne vehicles.Biol Bull.2001,200:216-221.
[20]Bell W J.Responses of arthropods to temporal chemical stimulus changes: simulation of a humidity differential and a pheromone plume[J].1986,139-148.
[21]蔡风英,谈宗山,孟赫,等.化工安全工程 [M].北京:科学出版社,2001.
[22]丁信伟,王淑兰,徐国庆.可燃及毒性气体泄漏扩散研究综述 [J].化学工业与工程,1999,16(2):118-122.
[23]王文娟,刘剑锋.危险性气体泄漏扩散数学模拟研究 [J].工业安全与环保,2006,32(11):23-25.
[24]周波,张国枢.有害物质泄漏扩散的数值模拟 [J].工业安全与环保,2005,31(10):42-44.