受水黾启发水上行走机器人控制系统开发
2010-10-22高铁红杨世忠薛永红
李 蕊,高铁红,杨世忠,薛永红
(河北工业大学 机械工程学院,天津 300130)
水黾依靠其腿表面特殊结构在水面上停留并能快速滑行或跳跃.水上行走机器人以其效率高、机动性好、噪音低、对环境扰动小的优势将在军事侦察、环境监测、水体检测、地下管网检测等军事和民用方面得到广泛应用.因此,开展水上行走机器人的研究将具有重要的理论意义和实际应用价值.美国麻省理工大学、日本东京工业大学、日本工学院大学和中科院化学所有机固体院水黾的潜在运动机理和疏水特性进行了研究探讨,并取得了一定的研究成果[1-4].美国麻省理工学院(MIT)、卡内基梅隆大学、哥伦比亚大学、日本的中央大学、日本工学院大学工学部和河北工业大学的学者都对水面行走机器人进行了研究,制作出样机,取得了一定研究成果[5-9].本文研究一种依靠浮力停留在水面的水上行走机器人.该机器人前后4条腿采用漂浮原理支撑,两中间腿模仿水黾腿划水姿态产生划水动作,使机器人具有良好的负载能力和较快的移动速度;该机器人突破传统电机驱动,采用微型电磁铁驱动.本文是在上述研究基础之上,进行水上行走机器人遥控控制系统开发,并在实验室环境下进行机器人运动实验研究.
1 水黾
水黾(Water Strider)是一种在湖水、池塘、水田和湿地中常见的小型水生昆虫.在垂直水面上,水黾腿不刺破水面对水面产生压水作用,形成椭圆形轨迹.
2 水上行走机器人
根据功能仿生原理,在研究仿生原型水黾结构及运动特性基础上,模仿水黾六条腿结构布局和两中间腿做划水运动进行水面滑行的运动机理,构建微小型水上行走机器人,如图1所示.该机器人以电磁铁二元逻辑控制替代电机复杂伺服驱动,其具有驱动数量少、结构简单、易微小型化、机动性好、转弯灵活、划水效率高、控制简单等特点.
3 水上行走机器人控制系统
该机器人的控制系统采用遥控操作,总体结构框图如图2所示.该控制系统主要内容包括硬件部分搭建和软件部分设计,根据系统要求,搭建一个基于AT89C51单片机[10]的主运动控制系统.
3.1 控制系统硬件部分
水上行走机器人控制系统硬件部分包括遥控器部件和机器人的接收遥控信号的控制系统硬件.
系统的硬件主要由信号输入模块,主控模块,驱动执行模块等组成.其中信号输入部分由遥控通讯发射部分——TX100ASK模块和接收部分——RX100ASK模块完成,两模块按照串口规则通讯.其中遥控发射部分为按键电路、编码控制模块、发射模块等,是遥控器的一部分;接收部分为接收模块、编码控制模块、逻辑部分和执行部分,属机器人运动驱动的执行部件;用户通过按键输入信息,发射部分将信号传输给接收模块,再通过主控模块将信号发送给被控对象,从而实现遥控通讯技术控制终端.主控模块采用AT89C51单片机作为控制核心,在自动运行时当AT89C51单片机接收到遥控信号输入时,AT89C51单片机自动控制电磁铁的通断电.驱动执行模块包括3个电磁铁,通过电磁铁的通断电的配合来完成机器人腿部的划水动作,从而使机器人能够实现前进,左转,右转等运动.
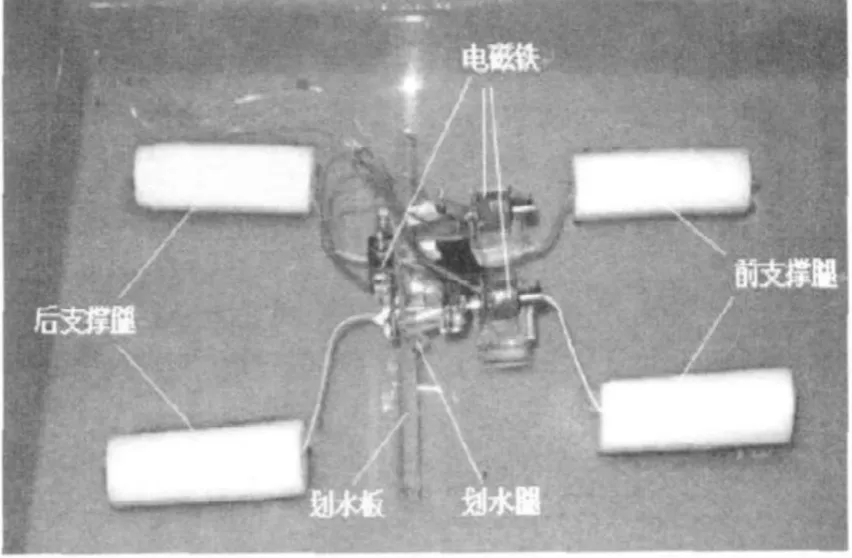
图1 水上行走机器人Fig.1 The water-walking robot
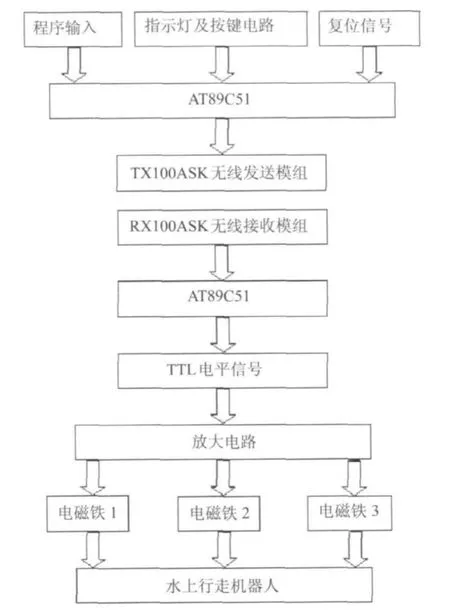
图2 控制系统总体结构框图Fig.2 The overall diagram of the control system
3.2 控制系统软件部分
根据水上行走机器人运动控制方案,设计运动控制软件系统.控制系统软件部分主要包括主程序和子程序.主程序完成系统参数初始化、循环检测外部控制信号、消抖处理和调用相应子程序的功能;动作子程序包括前进、左转和右转3个子程序,控制电磁铁的通断电时间和动作顺序.主程序流程图如图3所示.左转弯动作子程序流程图如图4所示.
4 水上行走机器人实验研究
在设计了遥控控制系统基础上,重新制作水上行走机器人,在实验室环境下,进行水上行走机器人在水面上前行、转弯实验,如图5所示.实验表明,该机器人可以实现前进、转弯等运动,具有良好的速度响应特性、运动灵活性,划水效率高、控制简单方便.
5 结论
本文进行了水上行走机器人控制系统开发,以AT89C51单片机为核心芯片并添加遥控通讯功能,设计遥控通讯技术控制终端,使机器人能够实现前进,左转,右转等运动.研究水上行走机器人的长远目标是可以实现机器人独立在远距离水面等环境下自主工作.由于实现遥控操作,本机器人更适合应用于要求本身承载能力强的场合,如环境监测、军事侦察等,适合在人类不适合达到的区域工作.因此,开展水上行走机器人的研究不仅具有重要的科学意义而且将在军用和民用上具有非常广阔的应用前景.
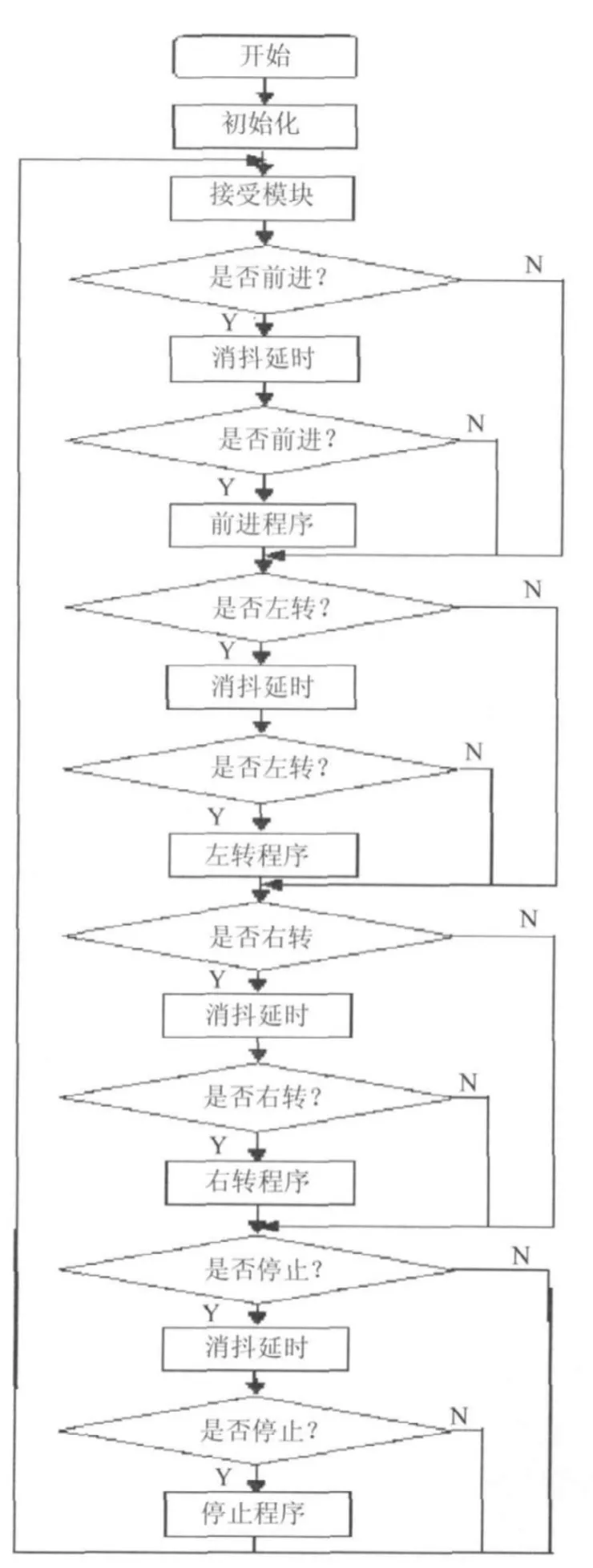
图3 主程序流程图Fig.3 The main program flow chart
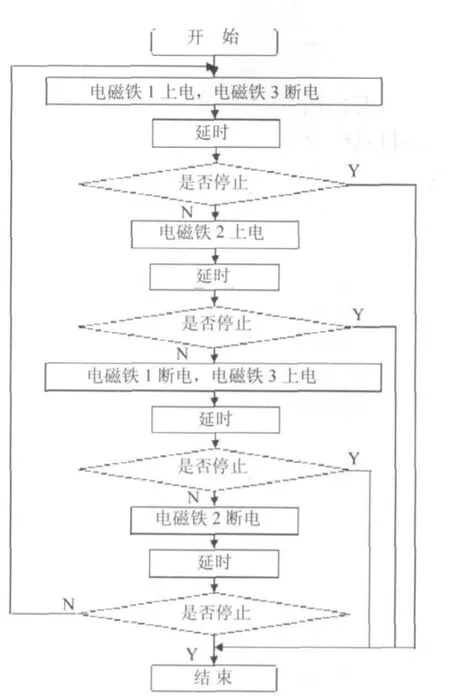
图4 水上行走机器人水上实验Fig.4 The water experiment of the water-walking robot
图5 水上行走机器人水上实验Fig.5 The water experiment of the water-walking robot
[1]Bush,John W M,David L Hu,et al.The hydrodynamics of water strider locomotion[J].Nature,2003(424):663-666.
[2]Takashi Yabe,Kazuya Chinda,Tomohiro Hiraishi.Computation of surface tension and contact angle and its application to water strider[J].Computers &Fluids,2007,36:184-190.
[3]髙信英明,小平圭佑,竹田ひとみ.アメンボの脚構造をモデルとしたロボットの基礎研究 [EB/OL].http://kiko.mech.kogakuin.ac.jp.
[4]高雪峰,江雷.天然超疏水生物表面研究的新进展 [J].物理,2006,35(7):559-564.
[5]Bush J,Hu D.Walking on Water:Biolocomotion at the Interface[J].Annu Rev of Fluid Mech,2006,38:339-369.
[6]Suhr SH,SongY S,Lee SJ,et al.Biologically inspired minature water strider robot[A].Proceedings of the Robotics:Science and Systems I[C].2005:319-325.
[7]Girard.Design review#1:water strider[Z].Columbia University,2005.2.
[8]Hideaki TAKANOBU,Jun YAMANAKA,et al.Development of Robot Based on Water strider[EB/OL].http://kiko.mech.kogakuin.ac.jp.
[9]高铁红.仿水黾机器人机构及性能分析 [D].天津:河北工业大学,2008.
