一种基于CMX910的AIS系统同步方案*
2010-09-26谢永锋鹏2姚元飞
谢永锋,刘 鹏2,佟 力,姚元飞
(中国西南电子技术研究所,成都 610036;2.中国西南电子设备研究所,成都 610036)
1 引 言
自动识别系统(Automatic Identification System,AIS)是一种新型的助航系统及设备,是可以用于水上交通联络和指挥的岸-船、船-岸、船-船之间的通信、辅助导航系统。该系统为船舶航行安全和航行管理提供了一种新型而有效的手段,它基于无线电应答器的相关监测技术,可用于船舶等运载工具的精确跟踪,以弥补传统雷达监测在自动识别目标以及获取航行动向信息等方面的不足,对雷达监测起辅助或替代作用。由于AIS技术先进、使用简易和经济,因此,被采纳为国际标准(ITU-R M.1371、IEC 61993-2)[1,2]。国际海事组织(IMO)将AIS作为海上航行船舶(≥300 t)强制性要求安装的安全设备,所以该系统有广泛的市场应用前景。
AIS是以自组织时分多址(SOTDMA)组网协议为核心技术,船舶间可以直接进行数据通信,无需类似管控中心等设备的支撑,这种组网通信方式不受不同海域的限制。但是,由于AIS以SOTDMA协议为核心技术,同步是TDMA网络组网通信的基础和关键技术,要求整个TDMA网络的时钟要相同,以保证时间的一致性。目前,国内外对AIS技术已经进行了大量的研究,产品也十分成熟,但对于AIS系统同步方面的研究却很少。本文根据ITU-R M.1371协议重点介绍了AIS的同步方法,并探讨了一种基于CMX910实现AIS同步的方案。目前,采用该方案的AIS已经在工程上得到广泛应用,组网测试结果表明:系统中各成员直接同步时间误差不超过±20 μs,间接同步时间误差不超过±50 μs,远远小于ITU-R M.1371所要求的直接同步时间误差为±102 μs,间接同步时间误差±306 μs[1,2]。
2 AIS概述
2.1 系统概述
AIS调制方式采用GMSK/FM方案[1],无线传输的带宽为25 kHz或12.5 kHz,射频工作频点是161.975 MHz/162.025 MHz,数据组帧格式采用简化的HDLC协议,数据编码为NRZI方式,数据传输比特率为9 600 bit/s。AIS分为船台和基站设备,两个设备的基本结构相同,其框图如图1所示。

图1 AIS框图
Fig.1 Block diagram of AIS
系统中,通信处理模块是系统的控制中心,内嵌一个GPS接收机,为系统提供精确的位置信息和时间基准。基带处理模块为系统管理VHF数字收发信机,同时完成系统的GMSK/FSK调制和解调工作。VHF数字收发信机包括3个VHF接收机和1个独立的VHF发射机。
2.2 SOTDMA协议[1]
AIS是以自组织时分多址(SOTDMA)组网协议为核心技术,该技术将时间分成若干超帧,每个超帧又分成若干时隙供船舶用户使用,每个用户周期地广播其当前的位置信息及对未来时隙的预约信息,以构成系统的时隙状态表,这个时隙状态表反映了所有参与船舶通信的用户对时隙动态使用的情况,依据该时隙动态表,各用户可以实现对信道时隙的自发管理。由于这些时隙资源由用户自行管理,不需要基站的参与,所以被称为自组织时分多址。若因船舶用户的增加或需发送信息增多,AIS超负荷时,SOTDMA能自动减少AIS用户的数量,保证最近的船舶能够接收,以牺牲覆盖范围的方式保证通信的可靠性。
AIS中定义1 min为一个超帧,每个超帧划分为2 250个时隙,每个时隙长26.67 ms,可以由任意用户使用,AIS通信应答机系统能提供在1 min之内发送至少2 000条船舶信息的报告。
2.3 SOTDMA消息结构
SOTDMA算法将利用时隙状态表来完成时隙的同步和确定初始时隙以及分配(预约)连续工作时隙。TDMA网络的同步是基于同步状态的算法。SOTDMA通信状态中的同步状态标志指示本机的同步状态是与UTC直接同步还是间接同步,与UTC间接同步时是与基站同步还是与其它的AIS船台同步。SOTDMA消息结构如图2所示,其中的通信状态字段包括同步状态的指示和时隙的使用信息。

图2 SOTDMA消息结构
Fig.2 SOTDMA message structure
3 AIS系统的同步技术[1-2]
同步是TDMA网络组网通信的基础,网络中的成员应使用同一个时间同步源,以保证时间的一致性。
同步按照其实现方式的不同可以分为直接同步和间接同步。在ITU-R M.1371协议中指出,无论是直接同步还是间接同步,协议将同步分成两个层次:一个是超帧同步,一个是时隙同步。超帧同步主要指各AIS用户间时隙号相同,故超帧同步主要是调整时隙计数的差值。时隙同步指各用户时隙号相同,但各个用户的时隙起点不同,修正时隙起点的偏差,时隙同步的精度要求更高。为了保证AIS通道的正常工作,能够获得UTC的用户应该基于UTC源连续对系统进行同步,间接获得UTC的用户应该基于其它UTC源连续地对其系统重新同步,如果系统已经处于帧同步,应该连续地进行时隙同步。
3.1 直接同步
直接同步是指在本机GPS接收机工作正常的情况下,通过GPS提供的UTC时间信息和秒脉冲来校正本机的时间。由于TDMA网络各成员之间的时间都是由GPS提供,各成员间的时间误差应满足ITU-R M.1371协议规定的±102 μs的要求。
3.2 间接同步
间接同步是指在本机或整个AIS网络GPS失效时,网络成员通过接收其它成员播发的消息来建立的一种同步关系。间接同步对时间精度的要求非常高,所以间接同步的实现是AIS的一个关键点和难点。
在ITU-R M.1371协议中指出,当船台不能直接或间接与UTC同步,但能接收到基站的传输消息时,应与最大接收台站的基站同步,并且同步到基站的船台应把其同步状态改变到“基站”以反映其同步状态,各成员间的时间误差应满足ITU-R M.1371协议规定的±306 μs的要求。间接同步按优先级可分为3种方式:
(1)与UTC间接同步;
(2)在有基站的条件下,与接收到消息最多的基站进行间接同步,当接收到好几个有相同接收台数的基站时,应基于其中MMSI最小者进行同步;
(3)在没有基站的条件下,与接收到消息最多的AIS船台进行间接同步,当接收到好几个相同接收台数的船台时,应以其中MMSI最小者进行同步。
AIS网络成员在GPS失效的情况下,接收和播发的消息都将可能是无效的,如果设备的UTC定时器精度比较高,会维持本机正常工作一段时间,可能会有时间向其它目标报告GPS失效,请求提高报告率,与之建立间接同步。当本机接收到请求进行间接同步的消息后,应将报告率提高到每2 s 1次,主要根据设备的定时器精度。当需选择某个基站或船台作为标杆站(semaphore),其选择算法流程如图3所示。
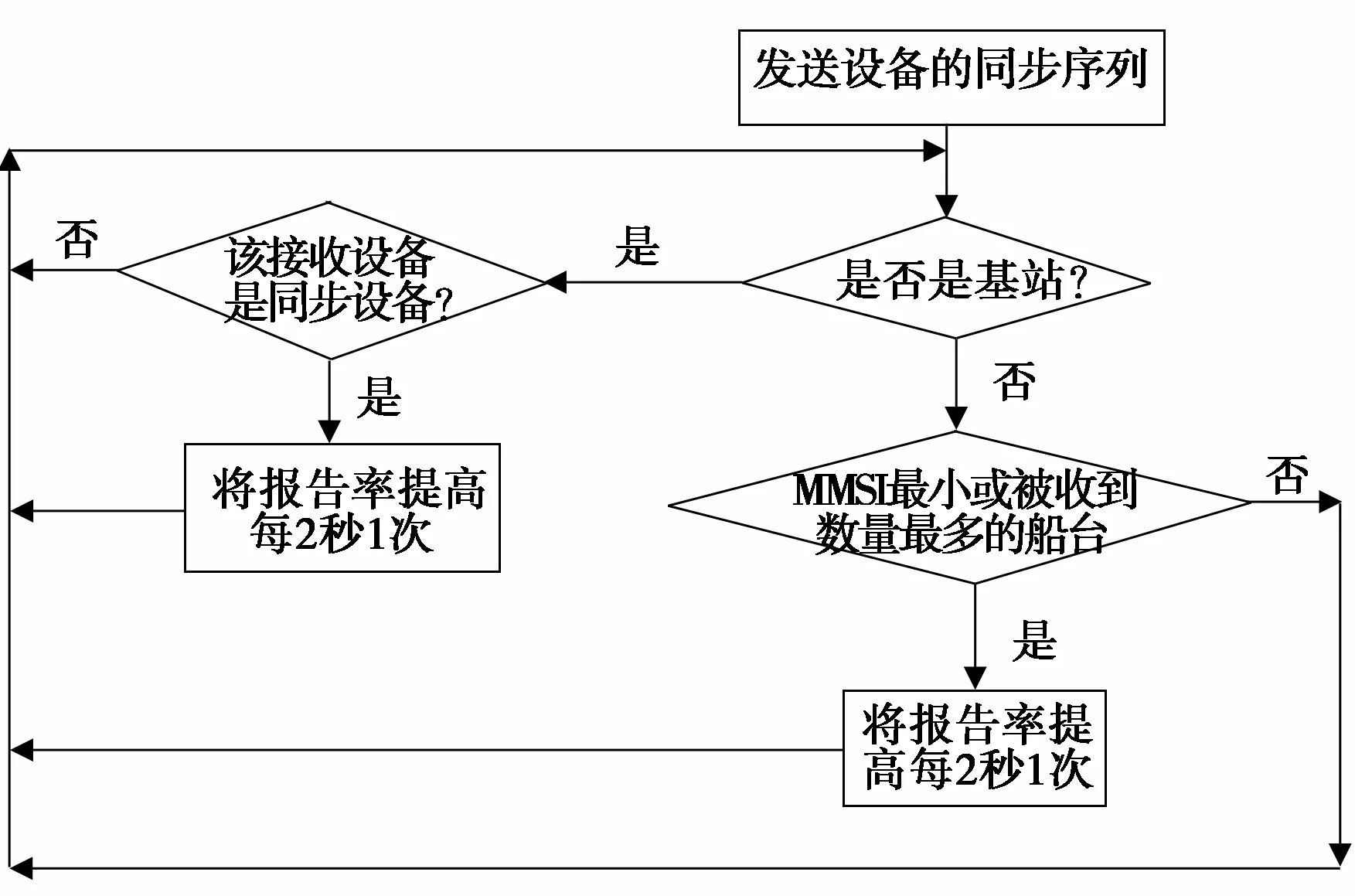
图3 AIS系统选择标杆站的流程图
Fig.3 AIS system select semaphore flow
4 基于CMX910的系统同步实现
4.1 CMX910芯片介绍[3]
CMX910是CML公司推出的一款AIS基带处理芯片,具有UTC接口,能根据接收到的GPS秒脉冲调整本地时钟。在该芯片内部有两个计数器,一个采样计数器,将每个时隙划分为1 280个采样点,每计数到1 280个采样就进位产生一个时隙;另外一个是时隙计数器,由采样计数器进位计数得到,最大为每分钟2 250个时隙,计数时钟由本地晶振产生,CMX910能根据GPS时钟校正其内部时钟,修改其内部的采样计数器和时隙计数器的值,并且能根据不同的需要配置为自动或手动的方式调整slot_sample_count寄存器的时间偏差。
4.2 基于CMX910的系统同步实现
AIS设备中通信模块和基带模块以CMX910的时隙和采样计数值为准[4],系统同步框图如图4所示。
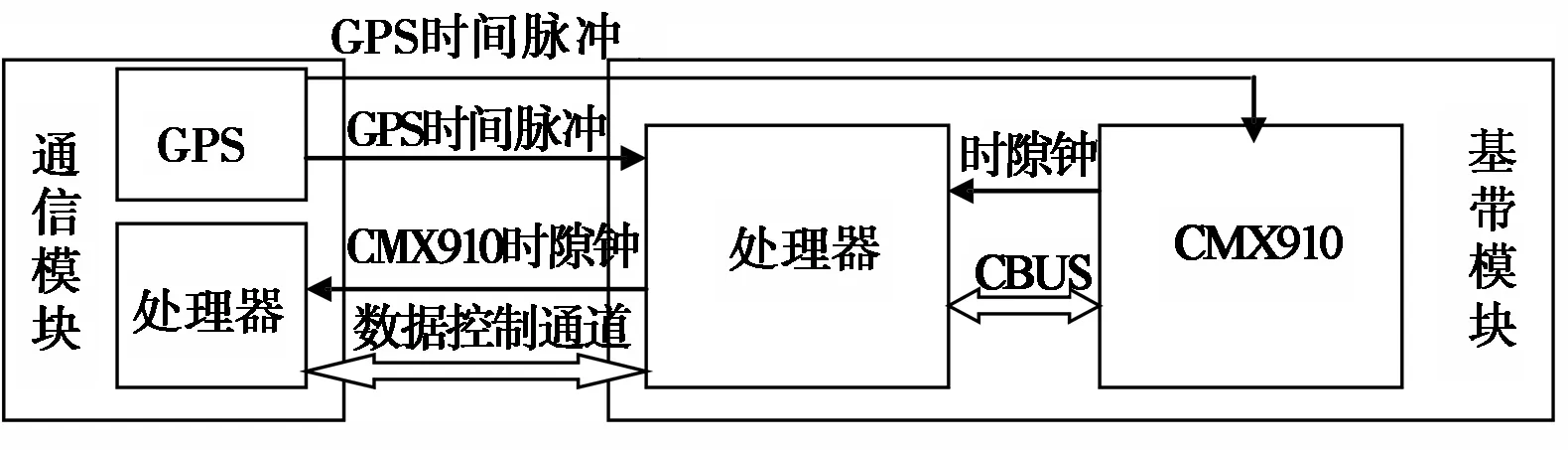
图4 AIS同步框图
Fig.4 Block diagram of AIS synchronization
在GPS有效的情况下,CMX910根据GPS提供的UTC分脉冲和秒脉冲校正其内部采样时钟,修改其本地时隙计数器和采样计数器的值,这样CMX910以GPS提供的UTC秒脉冲为同步源,每秒同步一次。网络中所有的AIS用户都是以GPS提供的UTC时间同步,所以,在GPS有效的情况下,基于CMX910很容易实现AIS的超帧同步和时隙同步。
在GPS失效的情况下,本地设备通过接收网络中其它成员设备播发的消息建立同步关系,若接收到某个成员设备播发的消息显示其GPS有效,则本地设备直接与该设备同步;若不能间接与UTC同步,但能与基站直接通信时,应与最大接收台站的基站同步。同理,若不能与基站直接通信,则与最大接收台站的船台同步,并且应把本地设备发送的消息的同步状态改成相应的同步状态以告知网内其它成员其同步状态。本地设备根据CMX910接收到消息的时刻进行超帧同步和时隙同步,当CMX910检测到接收消息的有效标志时,此时CMX910将该时刻的时隙号和采样号写入slot_sample_count寄存器中,通信模块的处理器获得此时刻后,按照SOTDMA协议同步原理,根据同步优先级算法选择适合的目标设备进行同步。当同步目标选定后,本地设备与接收到的该同步目标消息中所包含的时隙号进行比较,若两者的时隙号不等,则将本地时隙号修正为同步设备的时隙号,实现系统的超帧同步,同时根据接收到消息时的采样值计算一个相对的采样修正值来修正本地的采样计数器的值,实现系统的时隙同步。这样,本地设备与同步设备之间建立起系统的超帧同步和时隙同步。
系统组网试验测试结果表明:系统各成员间在GPS有效情况下,直接同步时间误差不超过±20 μs,在GPS失效情况下,间接同步时间误差不超过±50 μs,小于ITU-R M.1371所要求的直接同步时间误差为±102 μs,间接同步时间误差±306 μs[1,2]。
5 结 论
如何实现AIS设备间的同步是AIS组网通信的基础和关键技术,这要求整个AIS网络的时钟基准要相同,以保证时间的一致性。目前,国内外对AIS技术又进行了大量研究已经做了大量的工作,产品也十分成熟,但对于AIS同步方面的研究很少。本文根据ITU-R M.1371协议重点介绍了AIS的同步方法,并探讨了基于CMX910实现AIS同步的方案。实际系统验证和分析表明,采用该方案的系统同步可靠,组网性能好,系统误码率低,且该方案的实现对AIS系列产品的开发和应用具有重要的参考意义。
参考文献:
[1] Recommendation ITU-R M.1371-1,Technical characteristics for a universal shipborne automatic identification system using time division multiple access in the VHF maritime mobile band[S].
[2] ITU-R M.1371-1 ,IALA Technical clarification[S].
[3] CMX910 AIS Base band Processor[Z].[S.l.]:CML Microcircuits Communication Semiconductors Products,2006.
[4] 姚元飞,佟力,谢永锋.基于CMX910的AIS基带处理模块的设计与应用[J].电讯技术,2008,48(5):82-85.
YAO Yuan-fei,TONG Li,XIE Yong-feng.Design and Application of AIS Baseband Processor Based on CMX910[J].Telecommunication Engineering,2008,48(5):82-85.(in Chinese)
[5] 郭梯云,等.移动通信[M].西安:西安电子科技大学出版社,2000.
GUO Ti-yun,et al.Mobile Communication[M].Xi'an:Xidian University Press,2000.(in Chinese)
[6] Theodore S Rappaport.无线通信原理与应用[M].蔡涛,李旭,杜振民,译.北京:电子工业出版社,1999.
Theodore S Rappaport.Principle and Application of Wireless Communication[M].Translated by CAI Tao,LI Xu,DU Zhen-ming.Beijing:Publishing House of Electronic Industry,1999.(in Chinese)
