便携式抢险救援机械手的设计
——人机工程学的拓展应用
2010-09-06长安大学工程机械学院
长安大学工程机械学院 王 佳
便携式抢险救援机械手的设计
——人机工程学的拓展应用
长安大学工程机械学院 王 佳
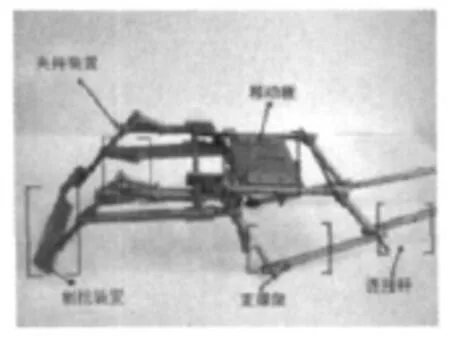
图1 机械手实物内部结构图
本文设计了一种新型便携式手持救援装置。应用人机工程学原理,使机械与人手相配合,从使用者的角度出发,操纵起来方便、快捷、不易产生疲劳,从而达到快速救援的目的。通过结构设计、模拟运行及制造加工,证明该设计的有效性。
机械手 抢险救援 人机工程学 模拟运行
一、引言
近年来,由于人为以及自然因素的影响,地质灾害的发生日趋频繁。在地震、泥石流、矿难等灾害中,由于地理环境复杂,大多数情况下仅能采用人工救援方式。考虑到人手在高强度作业下易疲劳,接触钢件、砂石等坚硬物体容易造成施救人员手指磨伤,并且工作效率较低,远达不到救援要求,本文设计了代替人手的简易挖掘装置——便携式抢险救援机械手,实现代替人手小范围的挖掘、搬运、夹持等功能。
二、结构设计
针对人工救援的现状,救援装置应满足下列要求:首先,不需要外部动力输入以适应现场无电等情况,动力来源于人的整臂力量;其次,保护人手,防止造成损伤以及实现较长时间的工作,提高工作效率;最后要求装置较为灵活,可实现多方位救援。
基于上述三点,本文提出了采用双摇杆机构实现刨挖功能、杠杆原理实现夹持功能的设计思路[1-3]。其设计的具体结构如图1所示。
工作原理:将连接杆部分固定于人的腕部,根据人机工程学[4]的设计尺寸,保证人手大致处于支撑架的上方(即设计的操作空间范围内),用四指的弯曲与弹簧的自动复位来实现对移动板下的控制杆的操纵,从而实现刨挖功能;夹持杠杆的支点固定于移动板上,尾部为夹持拉杆,通过手控制此杆实现前端夹持块的张合。
详细结构装置和应用表述如下:
(1)结构介绍。该装置主要由执行机构,传动机构和控制系统三大部分组成。其中执行机构包括指型钢制爪,利用仿生学[5]模拟手指的运动,实现简易的挖掘动作;传动机构,由连杆机构实现对力的放大,使执行机构产生足够的力来完成摆动、移动或复合运动来实现挖掘、搬运、夹持等动作。其控制是通过操纵杆,以简单的拉伸,实现机械手的张合、夹持等动作。
(2)头部刨挖装置。头部刨挖装置在应用过程中杆件的动作过程是:当把工作爪插入沙土中时,用四指向后拉动控制杆,由此带动杆逆时针旋转,通过其带动主杆沿套筒向后运动,通过连杆机构带动杆向下顺时针转动,带动执行机构向下刨挖沙土。然后利用手臂及全身的力量将沙土刨出。当松开手拉杆,由于复位弹簧作用,使执行机构实现自动回位。
(3)夹持装置。当想夹持某种物体时,可用食指和中指夹住夹持拉杆向后拉,通过之间的类似于虎钳的杠杆机构实现夹持物体的功能。同样,利用下部的复位弹簧,当松开夹持拉杆时,即可松开物体。为了在夹持物体时不受刨挖装置的影响[6],使刨挖装置可以前后移动,该动作通过一个可滑动的主板解决。在移动板的两侧支撑杆内部铣有一定深度的槽,两个支撑杆通过孔分别与前后两丝杆相连,主板可以在支撑杆之间来回滑动。主板结构及连接如图1所示。
(4)腕部连接。由于手腕部件设置在手部和臂部之间,它的作用主要是在臂部运动的基础上进一步改变或调整手部在空间的方位,以扩大机械手的动作范围,并使机械手变得更灵巧,适应性更强。
三、设计制造特点
便携式抢险救援机械手是人手的延伸,是手持装置,设计制造时应注意在以下几个方面:
(1)由于是人手持作业,要求整体重量要轻,否则容易造成使用人员手部疲劳。因此,在保证强度的前提下,结构杆采用轻质材料制作,除主要工作部件外,其他大部分杆件均采用高强度铝合金材料;
(2)为了保证操作轻便、省力,各连接部位应减小摩擦阻力,采取润滑措施。由于结构及空间制约,机械手连接部位采取滴油润滑方式。
(3)为适应人手部和前臂的生理特征,手腕连接部分在设计上采取外刚内柔,保证操作者腕部舒适性、可操控性且不易疲劳。
四、结论
本文设计的便携式抢险救援机械手主要有以下几个创新点:
(1)便携式抢险救援机械手体积小,重量轻,外形就像一副手套,便于携带。救援人员能方便地将其带入灾难现场,实施救援。
(2)便携式抢险救援机械手可代替人手实现小范围的挖掘及夹持功能。对石块,泥土,沙砾等散状物体实现简易的刨挖功能,而对于楼板,钢筋,混凝土等物体的搬移可避免与手的直接接触,起到了对手的保护作用,增强了手的工作强度,配合手实现灵活的抓取、刨挖功能。
(3)由于该设计无外部电源动力驱动,仅需人力,克服了电力设备由于没电而使机械瘫痪的弊端,使救援人员可以快速实施救援,增加被困人员生存的信心。
(4)产品造价低廉,操作简单,即戴即用,容易普及。由于近年来我国煤矿事业的迅猛发展,从事井下作业的工人急剧增多,煤矿安全隐患较为突出,故该机械手市场潜力很大。
(5)该机械手不仅可用于事故处理,也可以用于其它行业。如对于从事野外科考探险人员以及热衷于深山游览的“驴友”来说,此装置也是不二的选择。
[1] 张伟社. 机械原理与设计.西安:西北工业大学出版社,2001,P37
[2] 龚建新.《机械原理课程设计指导书》[M].北京:高等教育出版社,2005,P6
[3] 吴宗泽.机械结构设计准则与实例.北京:机械工业出版社,2006,P69-72
[4] 丁玉兰. 人机工程学.北京:北京理工大学出版社,2005,P65-70
[5] 林良明.仿生机械学.上海:上海交通大学出版社,1994(4):P5-12
[6] 何国伟.可靠性设计.北京:机械工业出版社, 1993, P135
