人工心脏血泵的模糊PID控制研究
2010-09-04檀深秋杨成忠李进军
檀深秋,杨成忠,李进军
(杭州电子科技大学自动化学院,浙江杭州310018)
0 引 言
考虑到人工心脏血泵的特殊要求,本文设计了一种新型的血泵和驱动电机合为一体的人工心脏血泵,驱动电机为无刷直流电机。纵观国内外驱动电机的控制系统,双闭环调速系统效果更佳,因此本文采用无刷直流电机的双闭环调速系统[1],将模糊控制与PID控制相结合,使血泵的控制效果得到很好的提升。
1 血泵建模及控制系统设计
人工心脏的血泵主要由泵体、定子和转子3部分组成,具体结构如图1所示。
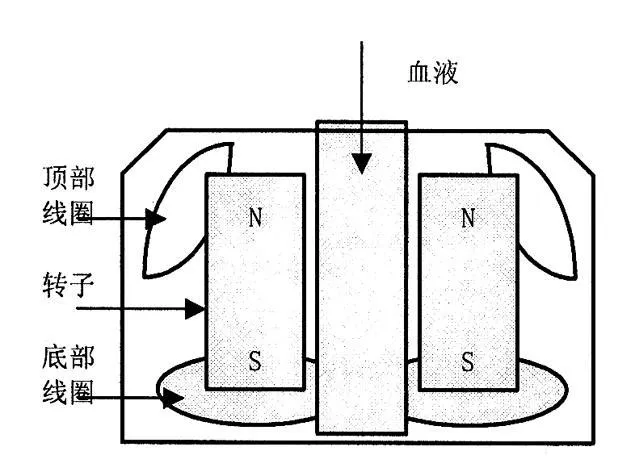
图1 血泵结构
人工心脏血泵由于其结构的特殊性,血泵磁场是三维的,同时电机内部的转子会直接与血液相接触,通过转子的旋转直接推动血液的流动。通过研究可以发现人工心脏的血泵是一种“特殊”的无刷直流电机,定子线圈采用三相星型连接。由晶体管开关器件组成电子换相电路,采用二导通三相六状态方法运行,在任意时刻血泵电机的动态方程如下:


式中,u、ia、e、Te分别为动态过程中电压、电流、感应电动势、电磁转矩的瞬时值;L为电枢电感;TL为负载转矩;GD2为电机及其它部件的飞轮转矩;n为转子转速;Km为力矩系数,为一常数。
对式1—4进行拉氏变换,并令全部初始条件为零,整理可得:

式中,IL为负载电流;TI为电磁时间常数;Tm为电力拖动系统机电时间常数。由上可得血泵电机数学模型如图2所示。
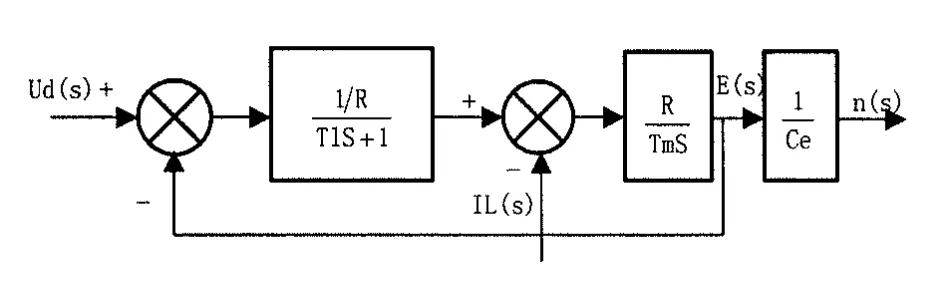
图2 血泵电机数学模型
在血泵电机数学模型的基础上采用电流转速双闭环反馈控制系统[3],其结构如图3所示,其中α为转速反馈系数,β为电流反馈系数。转速调节器ASR与电流调节器ACR采取串联结构,转速调节器的输出作为电流调节器的输入,电流调节器的输出去控制电力电子变换装置的占空比,从而获得与电流调节器相对应的输出电压,以期获得需要转速。转速调节器采用自适应模糊PID控制,电流环采用常用的PID控制,两者相结合控制电机运行。

图3 双闭环控制系统
双闭环系统在启动过程中,只有电流负反馈,没有转速负反馈,以获得允许的最大电磁转矩;达到稳态后,只有转速负反馈,不让电流负反馈发挥主要作用,以获得希望的转速。这样,两个调节器在不同的时段分别起主导作用,以此来获得理想性能。
2 模糊PID控制器设计
由于常规PID调节器不具有在线整定参数的功能,因此不能满足在不同条件下系统对参数的自整定要求,从而影响控制效果的进一步提高。自整定模糊PID控制器以偏差和偏差变化率作为输入,可以满足不同时刻对PID参数自整定的要求[3]。利用模糊理论在线对PID参数进行校正,便构成了自整定模糊PID控制器[4],如图4所示。
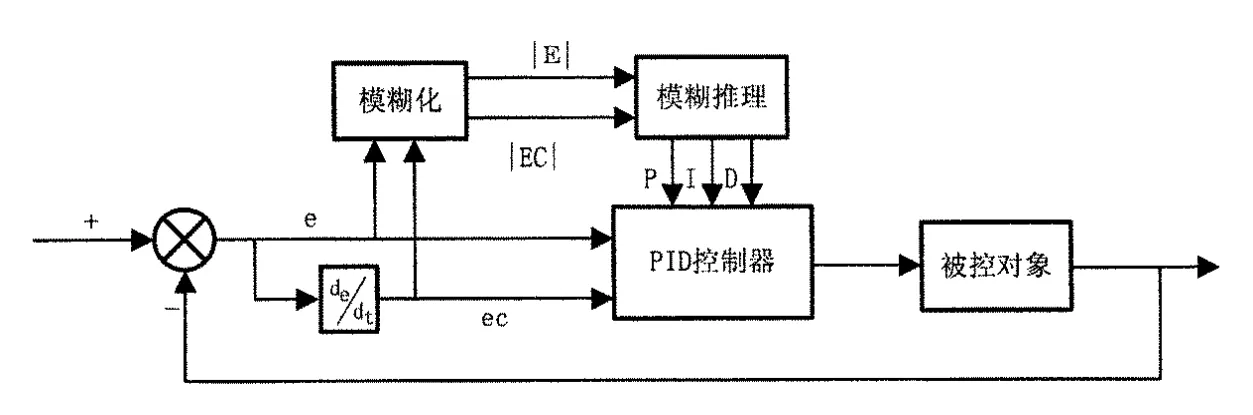
图4 模糊PID控制器

式中,Kp、Ki和Kd为参数的初始设计值,可由传统的PID控制器参数整定方法设计。△Kp、△Ki和△Kd是模糊控制器的3输出,可根据被控对象的状态自动调整PID控制器3个参数的取值,实现了自校正的功能。为便于计算机处理,输入量和输出量的隶属函数均选择三角形函数。模糊逻辑推理采取Mamdani类型,模糊蕴含关系如下:

依据专家经验[5],并根据实际控制经验,在实验基础上得到模糊控制规则表如表1-3所示:
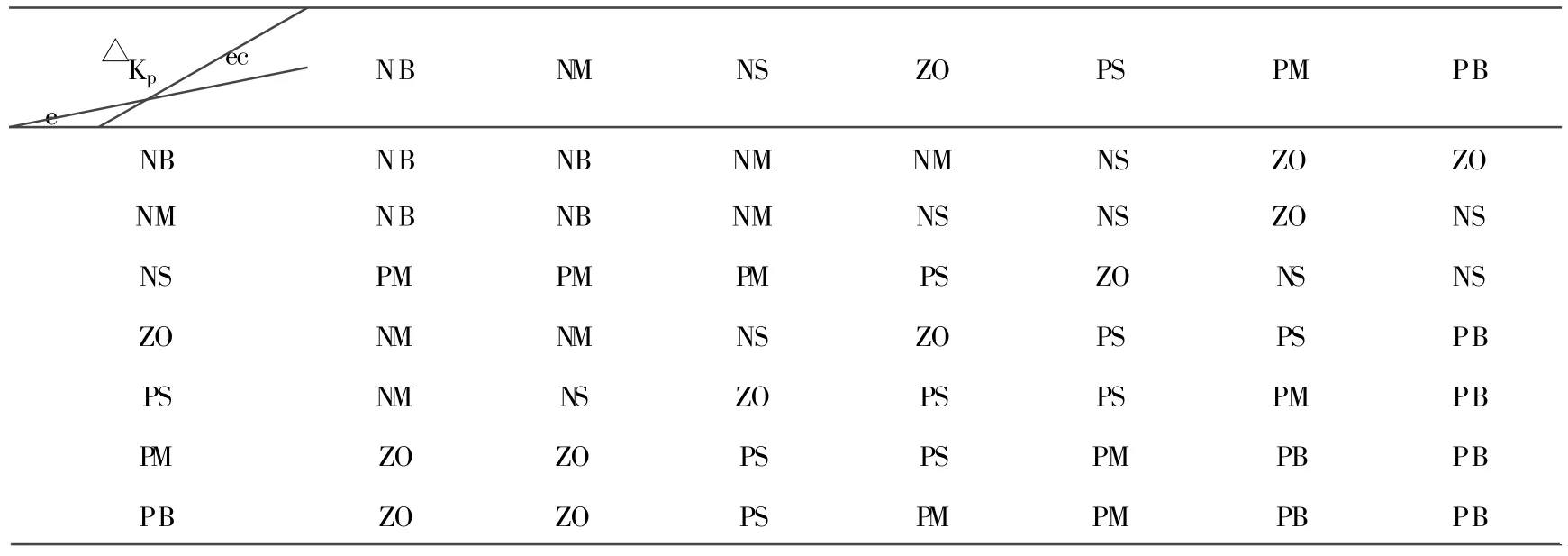
表2 Ki模糊规则表
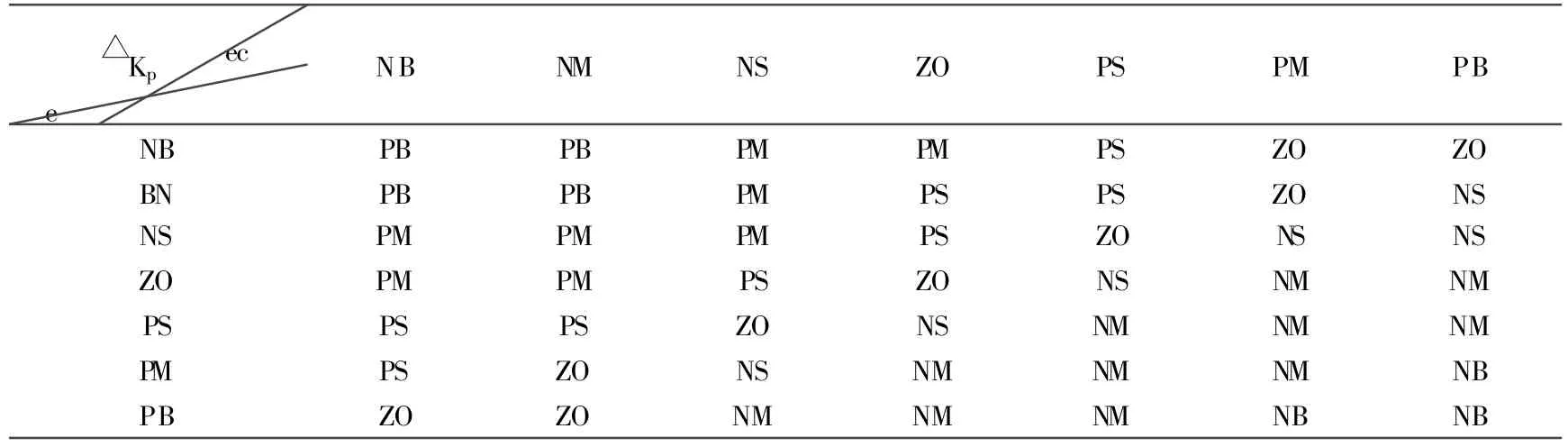
表1 Kp模糊规则表
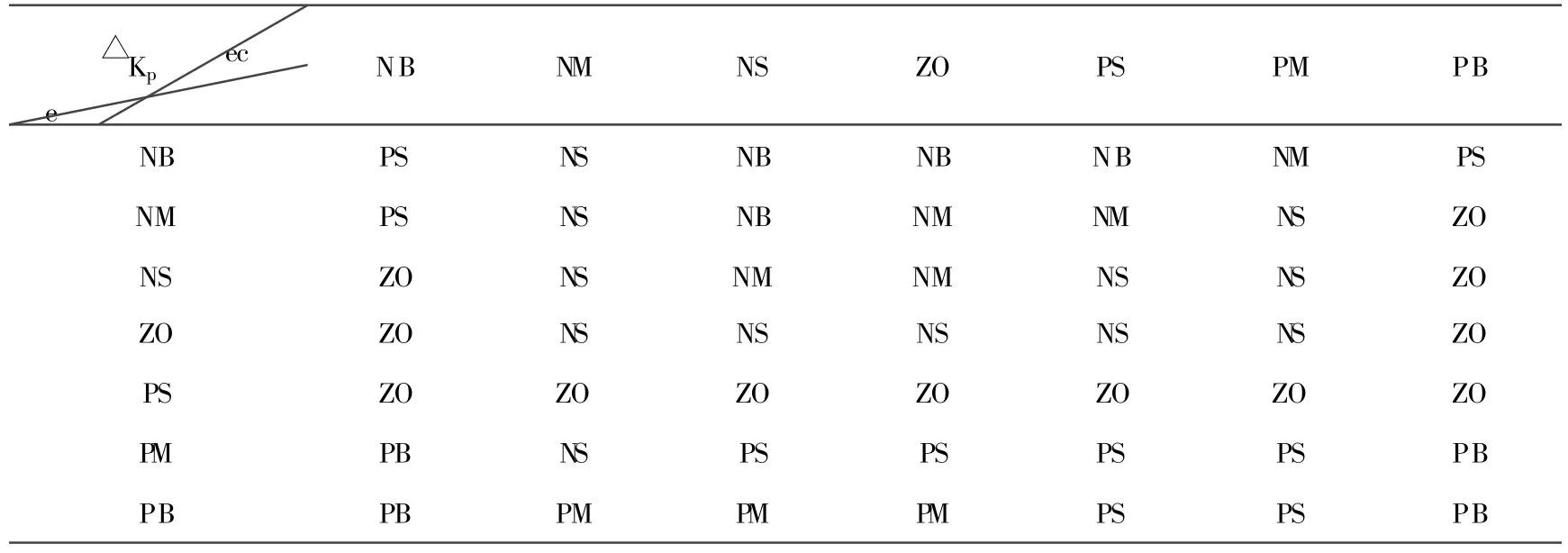
表3 Kd模糊规则表
3 仿真与实验分析
电机仿真参数为:线圈等效电阻 R=1Ω;线圈总电感L=0.001H;额定电压24V;额定电流10A;电动机轴上总飞轮力矩GD2=20;电流环滤波时间常数Toi=2e-4;速度环滤波时间常数Ton=1e-3;PWM功率放大系数Ks=11。
仿真过程中,转速环采用模糊PID控制,电流环采用PID控制。仿真结果如图5所示,其中虚线表示采用常规的PID控制器;实线表示采用模糊PID控制器。从仿真曲线可以容易看出模糊PID控制比常规PID控制有更快的响应和更小的超调。
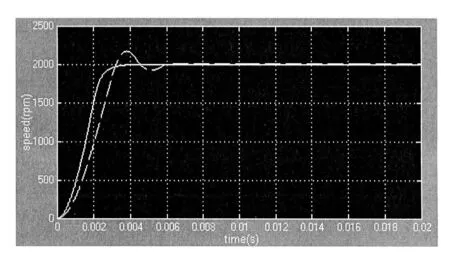
图5 仿真曲线
实验过程采用XC866作为主控芯片,控制信息通过IR2136驱动三相桥式逆变器的6个功率MOSFET。模糊PID控制程序流程图如图6所示。

图6 流程图
实验中血泵速度从2 000rpm上升到4 000rpm,再降到2 000rpm的速度曲线图如图7所示,从图7中可看出,采用模糊PID控制后,响应时间较快,变化过程较平稳,符合人工心脏血泵控制要求。
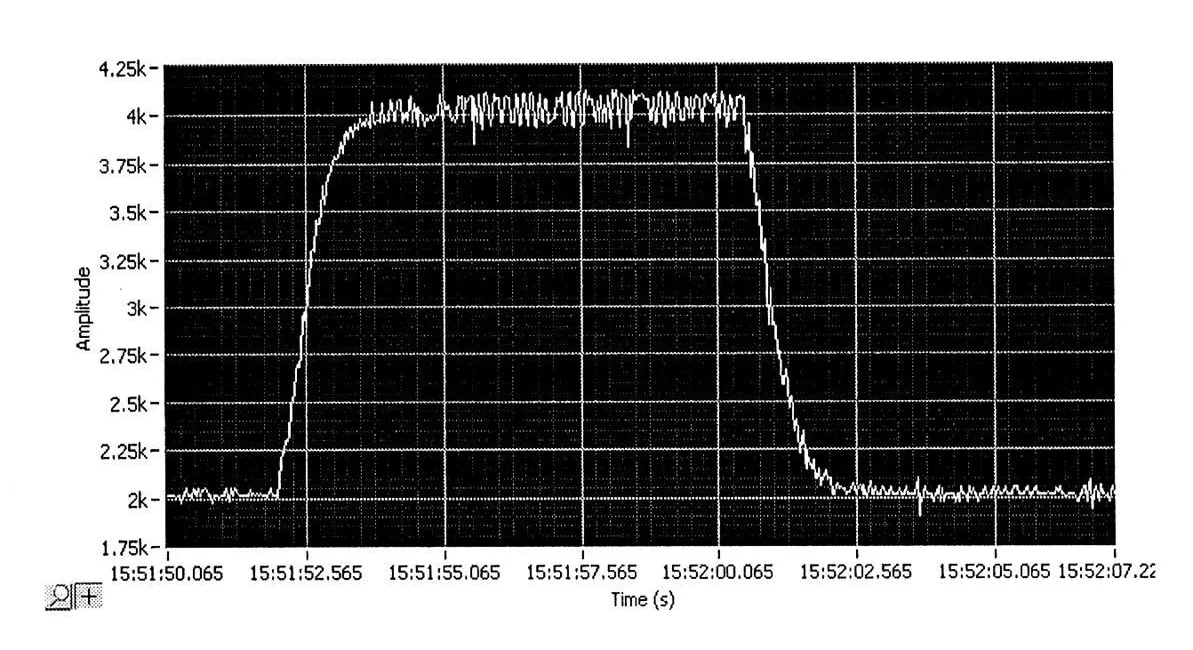
图7 速度曲线图
4 结束语
将模糊PID控制技术引入人工心脏血泵控制系统中,控制过程采用电流转速双闭环,模糊PID控制器根据转速和转速变化率的变化实时更新PID控制器参数。仿真与实验结果均表明模糊PID控制能使人工心脏血泵速度控制具有更快的响应和更小的超调,极大地提高了血泵控制系统的动、静态性能,取得了较为满意的控制效果。
[1] 曹少泳,孟丹,程小华.基于DSP的无刷直流电动机双闭环控制程序软件设计[J].微电机,2007,40(6):65-69.
[2] 曾令美,关军明.基于模糊控制的双闭环直流调速系统控制器设计研究[J].计算机与现代化,2006,5(5):88-90.
[3] 陈德地,王荣.自适应模糊PID控制在BLDCM调速系统中的应用[J].桂林电子科技大学学报,2008,28(5):418-421.
[4] 史浩,潘再平.无刷直流电机模糊控制系统及仿真分析[J].微电机,2005,38(5):42-44.
[5] Eiji Okamoto,Tsutomu Makino.Development of a miniature motor-driven pulsatile LVAD drivenby a fuzzy controller[J].The Japanese Society for Artificial Organs,2007,10(8):158-164.