心脏辅助与替代装置中血泵的控制及监测方法
2013-12-05张涛胡兆燕陈正龙侯晓蓓
【作 者】张涛,胡兆燕,,陈正龙,侯晓蓓
1 上海理工大学机械工程学院,上海市,200093
2 上海理工大学医疗器械与食品学院,上海市,200093
3 上海医疗器械高等专科学校医疗器械工程系,上海市,200093
0 引言
心脏手术被认为是最重要的医学进步之一,据中国体外循环学会的资料统计,截止到2008年底,我国开展心脏手术的医院达到671家,2008年全年开展的心脏手术数量约为14万例。用体外循环实现心肺转流是顺利完成心脏手术的先决条件,体外循环(如图1)是把人体内静脉血液引流出人体外至人工心肺机内,进行氧合和排出二氧化碳,然后再由血泵输入人体内,以维持周身血液循环的过程。血泵是体外循环装置中关键的组成部件,并且在心脏直视手术、心脏手术的术后恢复、心脏移植的等待期以及心力衰竭患者后期等都需要使用机械辅助循环,其主要作用是代替心室的搏出功能和术中失血的回收或用于心脏停搏液的灌注等。因此,在血泵的研制与临床应用过程中,对血泵流量和压力等流体力学参数的检测,控制方法的研究,生物相容性的检测以及稳定性可靠性等的评价都至关重要。本文主要介绍血泵控制策略、监测方法方面的研究现状及其未来可能的发展方向。
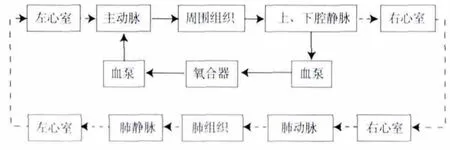
图1 体外循环原理Fig.1 The principle of extracorporeal circulation
1 血泵的控制方法
血泵流量能否满足受体的生理需求,除泵体结构参数外,还取决于血泵的控制系统,如能源提供、控制策略等。其中血泵控制策略是关键技术,因为它涉及到血泵电机驱动的反馈信号,是否需要传感器等,并最终决定血泵的输出流量和压力[1]。目前,常直接利用血压和血流量作为被控对象来直接调节血泵驱动电机的转速,并已在临床中得到应用。此外,还出现了利用心率、心室功、血流辅助指数等基于生理参数来调节血泵转速的控制算法,并都已取得良好的应用效果。
1.1 基于血流量和血压的血泵控制方法
由于临床应用中的血泵要求其流量可调,早期的血泵控制系统主要利用动脉血流量和血压作为控制变量来调节血泵转速以此响应患者的生理变化[2-4],并且经过体外实验、动物实验和临床应用证明这些控制算法都可以取得良好的临床应用效果。
付霆等[5]设计的离心式血泵控制系统在检测到压力值过大时自动降低驱动电机转速等方面来保证运行;常宇等[6]提出了全程滑膜变结构控制器来实现期望的血泵流量,该控制算法提高了控制器的鲁棒性。但是由于采用动脉血流量和血压作为控制变量常需要采用有创的测量方式,因此,并不适合用于如人工心脏等长期循环辅助中。
1.2 基于心率的血泵控制方法
在人体的血液循环系统中,心输出量反映了人体的生理需求,心输出量与心率之间存在函数关系,在心率较低的情况下,心输出量随心率的增大而增大,所以心率能反映人体对血流量的需求[7]。因此,除了上述直接利用血压、血流量作为被控对象的算法之外,还可以设计出基于心率的血泵流量控制算法来调节血泵电机的转速。
2006年,Vollkron等[8]提出一种将血泵转速设定成心率的线性函数的控制算法,该策略根据患者的平均心率来计算血泵的参考流量,并根据该流量值来调整血泵的工作状态。类似地,在Karantonis等[9]的设计中,泵转速被设计成与心率的活动水平指数和三轴加速度计的函数。以上这些控制算法都是人为地设计了心率和血泵转速之间的直接映射关系。但是由于人体的心率同时受到神经体液等多方面因素的影响,这种简单的映射关系并不能很好地根据患者的生理变化来控制血泵。为了达到改善心率控制算法精确度的目的,高斌等[10]提出利用心率作为控制变量的模糊控制器以及基于非参数模型自适应控制算法的控制器来跟踪期望的心率。数值模拟、体外模拟实验、动物实验等都表明可以响应受体灌注需求的变化并能够产生足够的血流量。
比较典型的基于心率的血泵流量控制策略如谷凯云等[11]提出的控制算法,其具体实现方法是针对主动脉血泵的控制,通过分析心率与流量之间的相互关系,从而建立心率与血流量之间的关系模型,再运用PID控制算法对血泵输出流量进行控制,并根据人体心率和流量的关系验证血泵流量模型的准确性。结果表明:基于心率的血泵流量模型能够反映人体血液流量的需求,通过控制血泵的运转可实现满足人体生理需求的流量输出,并可以实现快速稳定的响应。
1.3 基于心室功的血泵控制方法
心脏泵血功能的评定,通常可以用单位时间内心脏输出的血流量及心脏所做的功表示。自然心脏的心室功分为内功、外功两类[12]:内功表示在心脏活动中为克服心室自身的能量消耗所作的功;外功是指心室推动血液运动时所作的功。根据能量守恒原理,血泵所作的功等效于心室外功。从评价心脏泵血功能的指标考虑,只要做到血泵的输出功率(即血泵输出的流量和压力的乘积)与心室功率相符,就能说明满足受体的生理要求。因此,用心室功作为血泵的控制目标,既可以模拟人体心脏的调节机制,又可以为血泵动力源的设计提供理论依据。
由血泵的工作原理可知,血泵电机的转速决定血泵的转速。因此,只要控制血泵电机的转速就可以控制血泵的转速,从而达到控制血泵功率输出的目的。基于心室功的血泵控制系统如图2[13]所示。

图2 基于心室功的血泵控制系统框图Fig.2 The block diagram of blood pump’s control system based on ventricular work
其中,内反馈中的信号I、U0分别表示血泵电机的相电流与血泵电机转子位置过零点时的反电势,U0用于确定血泵驱动电机的相序;P表示体外循环的压力,Q为血液流量。控制系统的外反馈起监控作用,如果当血泵输出的流量和压力不符合循环系统的需求时,就会对目标模型进行适当的修正。结果表明:血泵驱动电机的输出量与控制目标模型相符,控制系统的输出响应满足血泵控制系统的临床应用要求;同时,不论是常态还是病态,主动脉瓣处的仿真压力与临床数据基本符合。
基于心室功的血泵控制算法,主要是分析自然心脏和心脏替代装置之间的做功关系,从而建立用于驱动血泵电机的控制模型,并根据受体的常态生理参数,对血泵的控制模型进行计算和实验。与恒压或者恒速控制方法相比,此类血泵控制系统电机大部分时间运行在低速阶段,因此可以避免系统升温所导致的血液破坏,同时可以很好的满足受体的血流量需求。
1.4 基于血流辅助指数的血泵控制方法
为达到调节左心室辅助设备( left ventricular assist device,LVAD)和自然心脏能量分配的目的,将血流辅助指数(blood assist index,BAI)定义为左心室辅助设备(LVAD)输出能量与心血管系统的总能量之比[14],并将血流辅助指数作为控制对象来设计血泵的控制算法。该方法是将血流辅助指数作为控制对象来设计基于非参数模型自适应控制算法的血泵控制算法。运用非参数模型自适应控制算法设计控制器来调节血泵转速,因为非参数模型自适应控制算法可以只利用控制设备的输入-输出数据来设计控制器而不需要知道被控对象的数学模型[15],这满足了由于心血管系统的复杂性、不确定性和干扰等造成的很难推导出一个精确模型来设计控制器的特征[16]。通过调节实际测量得到的血流辅助指数来跟踪期望血流辅助指数。
实际的血流辅助指标BAIm是根据动脉压力Paop(t)、得到的动脉血流量Faop(t)、血泵供电电压U(t)和绕组电流值I(t)计算得到的。然后将测量血流辅助指标BAIm和期望BAId作为控制器的输入来调节血泵的转速。其具体的控制策略实现方式如图3[14]所示。

图3 基于血流辅助指数的血泵控制策略Fig.3 The control strategy of blood pump based on blood assist index
其仿真结果表明: 基于血流辅助指数的控制算法能够自动提高血泵速度来响应外周阻力的减少;当提高心肌收缩能力来模拟左心室恢复时,血流速会自动地增加到相适应的流量值。该基于血流辅助指数的控制算法可以通过调节血泵的转速来调节左心室辅助设备和自然心脏之间的能量分配,有利于促进左心室的逆重构,从而达到血泵的临床应用要求[14]。
2 血泵的检测方法
血液流量是血泵的辅助效果指标,也是血泵控制的重要依据;而压力则是反映血泵和人体血液循环系统之间相互作用的重要指标,只有当血泵输出端压力高于动脉压力,才能实现血泵的功能辅助,同时出口压力又不能太大。无论采用哪种控制策略,其最终目的都是要控制血泵输出一定的压力和流量,使其满足受体的生理需求。因此,不管是在研发阶段还是在临床应用过程中,对血泵输出液体的流量、压力参数检测至关重要。根据开发研究阶段的不同,分为体外模拟装置测量、动物实验和临床应用等阶段。对于体外装置模拟适宜采用直接测量法,而在动物实验和临床应用过程中,由于使用环境的特殊性,适宜选用间接测量法。
2.1 直接测量法
在血泵研发阶段,为达到加快开发进度和降低成本的目的,常采用体外心血管模拟循环系统来直接测量血泵的状态参数。在国外,血泵体外试验台的研究热点主要是建立能模拟受体生理特征的循环试验台,这种试验台的主要特征是能够模拟血泵在人体内运行的环境,通过模拟试验来测试血泵的流体力学性能[17-20]。
图4[21]建立了一种可以模拟部分生理特征的轴流血泵体外循环试验台,同步测试的指标包括: 不同血流量工况点的输入电流、输入电压、流量、出口压力、入口压力、电机转速等,通过计算分析测试结果,获得轴流血泵的功率、效率、流体力学特性等。因此,可完成对血泵的血流量和出、入口压力等性能参数的快速直接测量。该测试系统由上、下两层组成。其中,上面一层的设备主要是数据采集系统(包括计算机和二次仪表记录仪等);低层的设备由血泵、管路、储液槽、保温装置、供电系统、测量单元、调节装置、传感器等组成。测试介质选用40%的甘油水溶液,前后负荷分别用阀门和液柱高度调节杆来控制,转速与流量则由血泵控制器来控制,这样就能够获得不同前后压力与流量工况下的数据测量。

图4 体外循环试验台Fig.4 The test-bed for extracorporeal circulation
其中:1为计算机;2为流量传感器;3为液柱高度调节杆;4为储液槽;5为恒温箱;6为前负荷调节阀;7为入口压力传感器;8为血泵;9为出口压力传感器。
由于体外模拟测量并不能代替动物实验和临床研究中对血泵状态的检测或监测,且传感器应尽量避免与血液和机体组织的接触,从而减少对生物组织的危害。因此,在动物实验和临床应用过程中,采用直接法测量时传感器需要使用医用传感器,从而达到避免炎症、毒性等对生物组织的危害;对于完全植入人体的人工心脏辅助的血泵检测,还需要考虑传感器的大小、形状、重量、能源供应与人体组织或血液的接触情况,以及传感器本身的可靠性等。
2.2 间接测量法
在血泵的动物实验和临床应用过程中,为了尽量避免与血液、人体组织的接触,达到减小对生物组织的危害的目的,除了可以使用医用传感器进行直接测量外,还可采用间接测量方法对血泵血流量和压力进行监测,间接测量法有设计制作非直接接触的测量传感器和利用血泵的相关参数进行换算的公式法等。
设计制作非直接接触的测量传感器进行血泵输出流量、压力的测量是一个非常有效的测量方法,可以有效避免由于与机体组织接触所造成的感染等问题。日本学者Yamagishi H等[22]成功设计制作了非直接接触的压力测量传感器。这个血液压力传感器是由附着在磷青铜金属片上的应变片组成。由于磷青铜金属片附着在血泵的连接管道上,当管道收缩或膨胀时,就会引起应变片的收缩或伸长,这时应变计的输出可以反映管内液体压力的变化。
相对于血泵的压力测量而言,由于超声测量与血液不接触,测量探头可以直接挟持在人工心脏连接管路上或埋入到人工心脏血泵的入口处进行流量的测量。因此,多普勒超声流量计是实现血泵流量无创间接连续测量的重要方法。
利用血泵驱动电机参数换算血泵流量和压力已成为一个重要的监测方法。在这方面,曾培等[23-24]将神经网络技术应用于血泵的输出流量和压力的测量,其原理是输入功率P和转速n是决定输出流量Q及压力差H的最主要因素,即电机的驱动参数与血泵工况之间存在着某种确切的函数关系

因此,该方法选择输入转速n及功率P作为输入元,流量及压力作为输出元,并以此来组织神经网络,其测量精度已经可以达到95%。该方法与传统的测量方法相比较,具有无创性和结构简单的特点,不会对血液造成破坏并减少感染的机会,同时省去了压力表和流量计等辅助装置。
另外,Kitamura T等[25]采用人工心脏瓣膜上的压力流量模型、隔膜泵的弹性物理模型、极大似然算法等建立气动左心辅助装置的在线压力估测模型,再利用气动左心辅助装置中的空气压力和空气驱动器的活塞位置,来估测血泵的出口、入口压力。
3 展望与结论
随着医疗器械及其临床应用技术的高速发展,血泵不仅在心脏手术中的应用更为普及,相信在不久的将来,人工心脏完全取代自然心脏的应用也会成为现实,同时,也会对血泵的控制系统和监测系统提出了更高的要求。为此,应从以下几方面加强对血泵控制技术及监测方法的研究:
(1)基于生理机制的控制是血泵比较理想的控制策略,这样可以使血泵的输出更大限度地满足受体生理需求,提高受体的生活质量,应该是未来血泵控制系统的发展趋势。
(2)由于人体生理系统是一个复杂的时变系统,简单而单一的基于心率、心室功或血流辅助指数的流量控制算法并不能最大限度地满足人体正常生理需求,因此,还应该从多方面因素考虑血泵的控制算法,从而,提出更为精确的生理控制算法。
(3)血泵的检测技术是一个薄弱环节,原因是人体组织和血液的生物兼容性限制着传感器与血液的直接接触,因此,研制与人体组织兼容性更好的传感器是重要的一个方向。
(4)血泵状态参数的间接测量或通过已有参数进行预测或估计,将是血泵参数检测中一个很有发展前途的方向。
(5)要使血泵正常工作,同时最大限度地满足受体复杂的生理需求,除了要监测血泵状态参数外,还需要监测血泵对受体主要评价指标的影响,只有这样,才能对血泵是否正常工作做出正确的判断。
综上,控制和监测系统作为血泵使用过程中密切相关的系统,对血泵的临床应用都起到关键性的作用。受体、血泵、控制和监测系统组成了一个完整的相互关联的有机整体,为了让血泵达到协调而又便捷的工作效果,除了对血泵的机械结构提出要求外,控制系统应该达到满足受体生理变化的需求,而监测系统应该向与受体组织无接触和便于测量的方向发展,只有这样,才能够达到更好地服务于受体的目的。
[1]徐先懂,谭建平,龙东平.轴流式血泵驱动系统研究[J].中国医学工程,2006,14(1): 1-3.
[2]Ohuchi K,Kikugawa D,Takahashi K,et al.Control strategy for rotary blood pumps[J].Artif Organs,2001,25(5): 366-370.
[3]Wu Y,Allaire P,Tao G,et al.An advanced physiological controller design for a left ventricular assist device to prevent left ventricular collapse[J].Artif Organs,2003,27(10): 926-930.
[4]Giridharan GA,Pantalos GM,Gillars KJ,et al.Physiologic control of rotary blood pumps: an in vitro study[J].Asaio J,2004,50(5):403-409.
[5]付霆,谭小苹,裴觉民.心肺脑复苏装置(CPCR)控制与检测系统初探[J].生物医学工程学杂志,2000,17(1): 107-110.
[6]高斌,谷凯云,常宇,等.主动脉内血泵的全程滑模控制器设计[J].医用生物力学,2011,26(3): 279-285.
[7]陆柳,李景锡.心率对每搏输出量和心输出量影响的讨论[J].中国医学物理学杂志,2002,19(4): 237-238.
[8]Vollkron M,Schima H,Huber L,et al.Development of a reliable automatic speed control system for rotary blood pumps[J].J Heart Lung Transplant,2005,24(11): 1878-1885.
[9]Karantonis DM,Lim E,Mason DG,et al.Noninvasive activitybased control of an implantable rotary blood pump: Comparative software simulation study[J].Artif Organs,2010,24(2): E34-45.
[10]Gao B,Nie LY,Chang Y,et al.Physiological control of intraaorta pump based on heart rate[J].ASAIO J,2011,57(3): 152-157.
[11]谷凯云,高斌,常宇.基于心率的主动脉血泵流量控制[J].中国组织工程研究与临床康复,2011,15(13): 2390-2393.
[12]柳兆荣,李茜茜.血液动力学原理和方法[M].上海: 复旦大学出版社,1997.
[13]徐先懂,谭建平.血泵驱动电机的生理控制策略研究[J].生物医学工程与临床,2007,11(6): 415-419.
[14]谷凯云,高斌,常宇,等.一种主动脉内血泵血流辅助指数的控制策略[J].医用生物力学,2012,27(4): 403-408.
[15]Hou ZH,Han CW,Huang WH.The model free learning adaptive control of a class of MISO nonlinear discrete time systems[C].Shanghai: IFAC Low Cost Automation,1998.
[16]Boston JR,Antaki JF,Simaan MA.Hierarchical control of heartassist devices[J].IEEE Robot Autom Mag,2003,10(1): 54-64.
[17]Patel SM,Allaire PE,Wood HG,et al.Methods of failure and reliability assessment for mechanical heart pumps[J].Artificial Organs,2005,29(1): 15-25.
[18]Liu Y,Allaire P,Wu Y,et al.Construction of an artificial heart pump performance test system[J].Cardiovasc Eng,2006,6: 153-160.
[19]Legend re D,Fonseca J,Andrade A,et al.Mock circulatory system for the evaluation of left ventricular assist devices,endoluminal prostheses,and vascular diseases[J].Artificial Organs,2008,32(6):461- 467.
[20]Timms D,Hayne M,Tan A,et al.Evaluation of left ventricular assist device performance and hydraulic force in a complete mock circulation loop[J].Artificial organs,2005,29 (7): 573- 580.
[21]柳光茂,周建业,胡盛寿,等.左心辅助泵体外测试的研究[J].中国生物医学工程学报,2010,29(1): 106-110.
[22]Yamagishi H,Sankai Y,Yamane T,et al.Development of built-in type and noninvasive sensor systems for smart artificial heart[J].ASAIO J,2003: 265-270.
[23]封志刚,曾培,茹伟民,等.神经网络在人工心脏输出流量和压力检测中的应用[J].江苏理工大学学报,2000,21(1): 15-18.
[24]李岚,曾培,钱坤喜.叶轮式人工心脏输出流量的无创性测量系统[J].电子测量与仪器学报,2003,17(1): 53-56.
[25]Kitamura T,Gross DR.On-line pressure estimation for a left heart assist device[J].IEEE Trans Biomed Eng,1990,37(10): 968-974.
