风电机组电动变桨距控制系统的研究
2010-09-03曾凡超曹仁贤
朱 波, 张 兴, 曾凡超, 曹仁贤
(1.合肥工业大学 电气与自动化工程学院,安徽合肥 230009;2.合肥阳光电源有限公司,安徽 合肥 230088)
0 引 言
风电机组变桨距系统的执行机构主要有液压和电动2种。液压控制系统具有传动力矩大、质量轻、刚度大、定位精确及动态响应快等优点,能够保证快速、准确地把叶片调节至预定桨距角[1,2],但液压变桨机构比较复杂,存在非线性、漏油及卡塞等现象,电动变桨距系统可以克服这些缺点,桨距角的变化通过对伺服电机的控制来实现,其结构紧凑、控制灵活、工作可靠[3,4]。随着变速恒频发电方式的提出,有学者提出以风机转速作为输入信号设计PID调节器,从而输出桨距角命令[5];但是桨距角的变化对于随机变化的风速而言是非线性的,为了降低非线性的空气动力学特性对输出功率的影响,设计了模糊PID变桨距控制器,从而使系统的稳定性受参数变化的影响较小,控制性能得到提高。
本文以发电机实际输出功率与基准值的差值为输入信号设计变桨距控制器,向变桨距执行机构输出桨距角指令,实现了在高于额定风速阶段输出功率稳定在额定功率附近。基于 Matlab/Simulink建立变桨距控制器的仿真模型进行研究,结果验证了该变桨距控制器设计的合理性和正确性。
1 变桨距风力机的功率控制策略
1.1 风力机的输出功率特性
变桨距风力机捕获的风能P与风速V、风能利用系数C p、桨距角β和叶尖速比λ之间存在以下关系[6]:

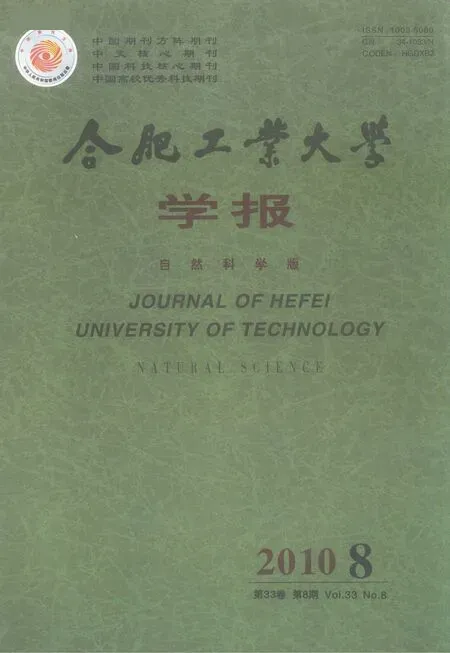
由(1)~(3)式得风力机的Cp(λ,β)特性曲线,如图1所示,由图 1可看出,对于某一固定的β,存在唯一的最大风能利用系数;对于任意的 λ,β=0°时C p相对最大,随着 β的增大 ,C p明显减小。因而,在额定风速以下,保持β=0°,在高于额定风速阶段,通过调节桨距角的大小使输出功率稳定在额定功率附近。
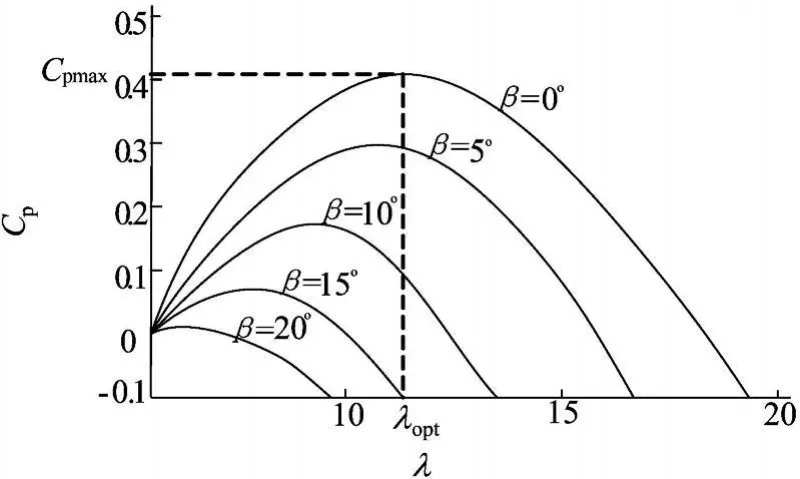
图1 变桨距风力机的C p(λ,β)特性曲线
1.2 风力机的功率控制策略
在不同的风速段,风电机组的输出功率控制策略有所不同,可以按切入风速、额定风速和切出风速划分为4部分,如图2所示。
在第1和第4部分风力机不工作,即风力机处于停机状态,直至风速达到切入风速;第2部分处于切入风速和额定风速之间,这一阶段通过转速调节器控制发电机的电磁转矩,在此区域内,设基准转速为 ωref,带入(3)式得到 λmax,此时 β=0゜,即跟踪最大功率点实现最大风能的捕获;第3部分处于额定风速和切出风速之间,这一阶段需要投入桨距角控制器,以控制风力机输出功率的大小,即当实际输出功率大于额定输出功率时,增大桨距角以减少风能的捕获,反之亦然,从而在此区域内通过调节桨距角保持风力机输出功率稳定在额定功率附近。
图2 各风速段风力机参数的变化情况
2 电动变桨距控制系统的设计
2.1 电动变桨距控制系统的工作原理
通过研究发现,合理地控制桨叶的桨距角可以减小塔架的振荡和桨叶的载荷,从而减小风力机的疲劳度,延长风力机的使用寿命。电动变桨距控制系统通过桨距角控制器得到桨距角指令,进而把桨距角指令转换为伺服电机的控制信号,以此实现对桨叶位置的控制。伺服电机的控制结构采用电流环、转速环和位置环的3环控制结构,3环一般采用PI调节器,其参数的整定针对不同的要求,按典型Ⅰ型系统或典型Ⅱ型系统来设计[7],对i d和i q进行控制可以分别控制转矩和位置,从而实现对桨叶位置的控制。
2.2 桨距角控制器的设计
由上述分析可知,变桨距控制器的设计是电动变桨距系统的重要组成部分,当风速低于额定风速时,风电机组通过控制发电机的转速跟踪最大功率点,此时保持β=0°;当实际风速高于额定风速时,不能再通过对发电机转速的控制来增加发电机的输出功率,否则将使发电机过载[8],此时需要启动变桨距控制器,通过增大桨距角以减少风轮捕获的风能,保证风电机组的输出功率在高于额定风速阶段稳定在额定功率附近。
通常,变桨距控制器是基于风力机的线性化模型设计的,能够较好地实现对桨距角的控制,但实际中风力机具有强非线性,所以基于线性化模型的设计具有局限性,当风力机运行点偏离其线性化点时,控制器的性能明显变差,甚至会引起系统的不稳定,因此本文设计了模糊PID变桨距控制器,利用模糊推理规则对 KP、KI和 KD3个参数分别进行在线调整,如图3所示。

图3 模糊PID参数自整定控制器的原理




本文设计的变桨距控制器通过3个双输入-单输出模糊控制器调节PID控制器的参数。在变桨距功率控制的过程中,模糊控制器根据功率偏差信号e及其变化率调节KP、KI和KD的数值,其整定规则如下:
(1)当|e|较大时,为加快系统的响应,减缓|e|变大的趋势,应取较大的KP;为防止积分饱和,避免出现过大的超调,去掉积分作用,即KI=0;KD的大小与的方向有关,取大小适中。
(2)当|e|中等大小时,由于既要考虑系统的响应速度,又要减小系统的超调,可适当减小KP;同时引入积分环节,但KI应取较小值;KD与的方向有关,但应取较小值。
(3)当|e|比较小时,为使系统具有良好的稳态性能,应取适中的KP;为减小系统的稳态误差,可取较大的KI;为避免系统在稳定值附近振荡,同时考虑系统的抗干扰性,可根据系统的实际情况选取较适宜的KD。

表1 K P的模糊控制规则
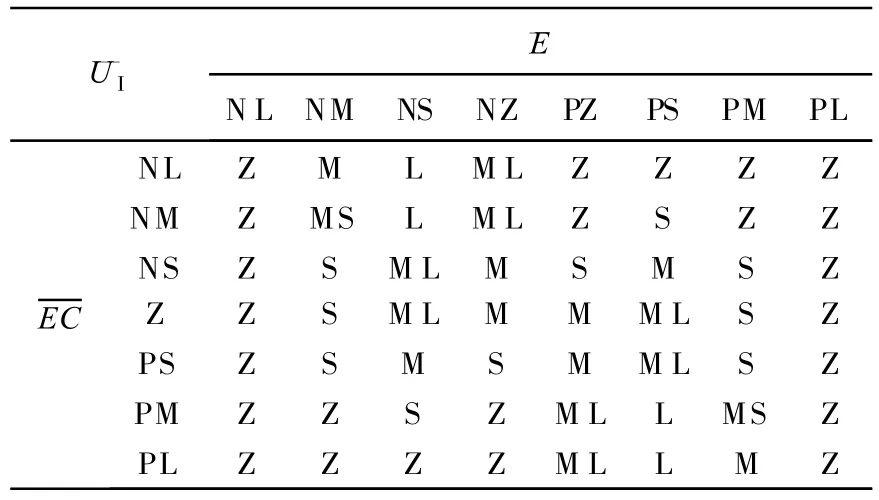
表2 K I的模糊控制规则
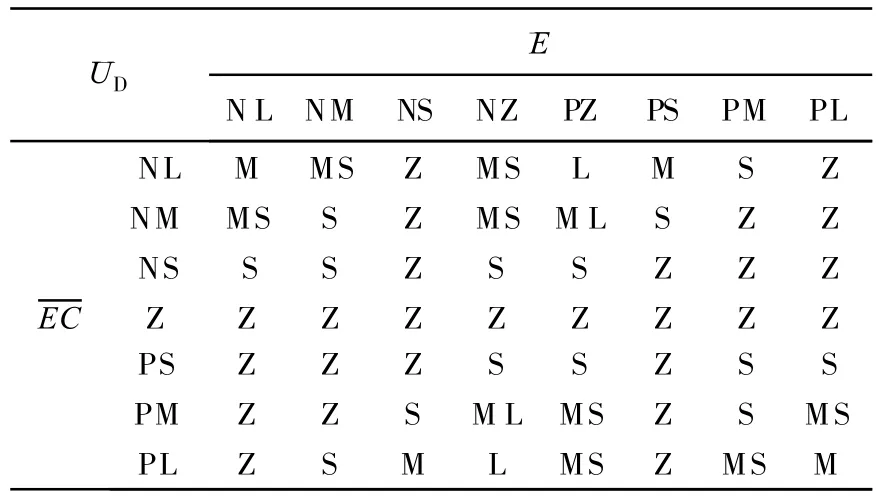
表3 K D的模糊控制规则
2.3 电动变桨距执行机构的设计
电动变桨距执行机构的模型如图4所示,桨距角基准值βref由变桨距控制器给出,并与实际β比较得出Δβ,进而驱动伺服电机改变桨距角。由于大容量的风力机桨叶重达数吨,桨距角的变化速率和角度的变化范围都有饱和限制,当桨距角及其变化速率小于饱和限度时,桨距角变化呈线性。本文设计的变桨距执行机构以一阶延迟系统表示,其数学模型可以描述为:

其中,桨距角的变化率限幅为 10(°)/min;τβ=5 min。
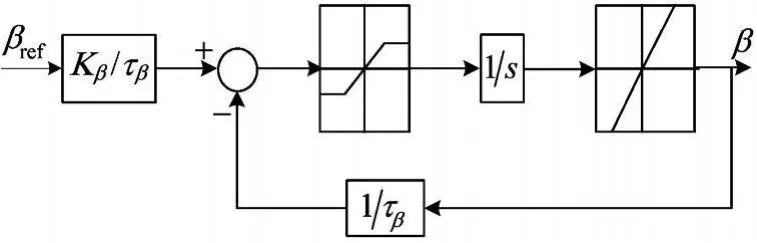
图4 变桨执行机构模型
3 仿 真
本文基于Matlab/Simulink建立随机风况下变桨距控制器的仿真模型,具体参数如下:发电机的额定容量为 800 k W,风力机转子半径R=25 m,额定风速V n=12 m/s。其中风速模型输出风速如图5a所示,其平均值为10 m/s,波动为20%。该随机风速下的输出功率波形如图5b所示,由图5b可见,在额定风速以下,输出功率随风速的变化而变化,两者曲线形状基本吻合;在额定风速以上,输出功率保持为额定功率。风能利用系数和桨距角曲线如图5c、图5d所示。

图5 风速平均值为10 m/s时的仿真结果
在额定风速以下,保持最大风能利用系数C pmax并且桨距角 β=0°,在额定风速以上,变桨距控制器开始工作,此时β随风速增大而增大,同时Cp显著降低,使输出功率稳定在额定功率附近。
通过风速模型输出高于额定风速的随机风,仿真结果如图6所示,由图6可以看出,系统的输出功率较好地稳定在额定功率附近,达到了在高于额定风速阶段起动变桨距控制器限制功率输出的目的。
4 结束语

图6 风速高于12 m/s时的仿真结果
本文在分析风力机输出功率特性的基础上,研究了不同风速段下的功率控制策略,同时设计了模糊PID变桨距控制器,并在随机风速下对其进行了仿真。仿真结果表明,本文设计的模糊PID变桨距控制器较好地实现了在风速高于额定风速阶段,通过起动变桨距控制器及时、准确地控制桨叶的位置,实现了在高于额定风速阶段输出功率稳定在额定功率附近,从而证明了系统设计的正确性。
[1] Senjyu T,Sakamoto R,Urasaki N,et al.Output power leveling of wind turbine generator for all operating regions by pitch angle control[J].IEEE Transactions on Energy Conversion,2006,21(2):467-475.
[2] Boes C,Helbig A.Intelligent hyd raulic pitch control valve for wind turbines[C]//The International Conference on Hydraulic Machinery and Equipments, Timisoara,2008:287-296.
[3] 林勇刚,李 伟,陈晓波,等.大型风力发电机组独立桨叶控制系统[J].太阳能学报,2005,26(6):780-786.
[4] Geng Hua,Zhou Honglin,Zhou Weisong,et al.Performance verification of theinverse-systeMcontroller for the variablespeed variable-pitch wind generation system[C]//Power E-lectronics Specialists Conference,2008:3311-3314.
[5] Slootweg J G,Kling W L.Aggregated modelling of wind park s in p ower systeMdynamics simulations[C]//Power Tech Conference Proceedings,Bologna,Italy,2003:23-26.
[6] Liu Hongwei,Lin Yonggang,Li Wei.Study on control strategy of individual blade pitch-controlled wind turbine[C]//The 6th World Congress on Intelligent Control and Automation,Dalian,China,2006:6489-6492.
[7] 张崇巍,张 兴.PWM整流器及其控制[M].北京:机械工业出版社,2005:112-123.
[8] Erlich I,Rensch K,Shewarega F.Impact of large wind power generation on frequency stability[C]//Power Engineering Society General Meeting,2006:1-8.