光纤陀螺干扰信号探测*
2010-08-11衣昌明杨东升
衣昌明 杨东升 詹 磊
(空军第一航空学院 信阳 464000)
1 引言
全站仪在地籍调查工作中,需要两点间通视,然而,城镇建筑物密集、行人车辆较多,严重影响控制点间通视,给控制点布设和后期的碎部点测量定向都带来诸多不便。这直接影响了工程进度,数据库难以及时更新,造成“老帐未清又添新帐”的局面。
文献[1]提出了光纤陀螺/全站仪组合定向的方法,用光纤陀螺和全站仪进行组合,不需要两点间通视,只需一个控制点就可以进行碎部测量,实现自动寻北。光纤陀螺通过敏感地球自转角速度自主地提供载体固定轴与真北方向的夹角,从而完成定向功能,为全站仪提供方位基准。
在地籍调查现场,工作环境比较恶劣,存在着外界干扰(例如人员走动、阵风、车辆振动等),严重影响光纤陀螺的输出信号,从而影响了测试精度,因此,为精确定向,确保碎部点的测量精度,必须消除光纤陀螺的偏移和噪声,提高抗干扰能力。
各种外界干扰的来源和作用机理各不相同,对定向结果的影响也不同。目前对光纤陀螺干扰信号滤波方法(低通滤波、五点三次滤波、数字滤波、小波阈值滤波、卡尔曼滤波、粒子滤波等),大都是对输出数据整体进行分析的,这对局部干扰的处理效果不是很明显。不能够有针对性的分析干扰,例如采集1分钟的陀螺输出数据,而只有10秒钟的数据受到外界干扰,如果对所有的陀螺数据都进行处理,效果不是很好。为此,对待光纤陀螺的输出信号,可以首先判断信号有无外界干扰,若有则判断出外界干扰的时间段,进行分析,分析干扰时间段信号与未干扰时间段信号的差异,最后选择相应的滤波方法对信号进行处理。因此,光纤陀螺扰动信号起止时刻的精确确定,则是进行滤波首先要解决的问题。正是在这一前提下,本文提出了一种利用小波模极大值检测光纤陀螺干扰信号的方法。
目前,光纤陀螺全站仪的组合设备正在试制中,为了进行实验分析,本文采用三轴转台模拟全站仪,将光纤陀螺置于转台内框中来进行数据采集。
2 光纤陀螺输出信号
光纤陀螺(FOG)是基于Sagnac效应的新型全固态陀螺仪,是一种无机械转动部件的惯性测量元件,通过敏感地球自转角速度在北向的分量可以实现寻北定向的功能。目前,中低精度等级的光纤陀螺已产品化,并在众多领域得到应用。
光纤陀螺的输出信号是Sagnac相移。在理想状态时,其输出信号和Sagnac相移成正弦关系;在低转速时几乎呈线性关系。然而实际的光纤陀螺元器件特性不可能是理想的,光纤由于瑞利散射将引起背向散射,环境的变化(如振动、温度、磁场的变化)都将导致信号中存在噪声和漂移等因素,这些都将影响到光纤陀螺的零偏稳定性[2]。另外,光纤陀螺工作的外部环境,(如阵风、人员走动、车辆振动等干扰)也会影响光纤陀螺的测量精度。本文主要讨论外界干扰的影响。
在静基座上,如果光纤陀螺的测量轴位于水平面内,则陀螺的输出信号为

式中:ω(t)是光纤陀螺输出的角速度信号;ωN的值为ωecosφ是地球自转角速度ωe的北向分量,φ是地理纬度;K是陀螺测量轴与地理北向之间的夹角;εd是陀螺的常值误差项,一般与陀螺的本身设计有关系,短期内可以用陀螺的零偏来代替;ε(t)是陀螺的随机游走;σn(t)是零均值的白噪声项,σ为噪声方差[3]。
3 小波变换与模极大值理论
小波分析(Wavelet Analysis)是上世纪80年代后期发展起来的一个新的数学分支,它被认为是傅里叶分析发展史上的里程碑。小波变换作为一种最新的时—频分析工具,它具有时间域和频率域的良好的局部化性质(即具有良好的时-频定位功能),被誉为数学显微镜[4]。
3.1 连续小波变换

称ψa,b(t)为小波函数,简称小波。其中,a为尺度因子,b为平移因子。变量a反映函数的尺度(或宽度),变量b检测小波函数在t轴上的平移位置。
定义2 设 ψ(t)∈L2(R)∩L1(R),且满足条件

则称ψ为允许小波,式(2)称为允许条件。
定义3 设 ψ(t)是基本小波,ψa,b(t)是由式(2)定义的连续小波函数。对于f(t)∈L2(R),其连续小波变换定义为
其中,a≠0,b,t均为连续变量,<>为平方可积函数空间的内积,(t)表示 ψ(t)的共轭。
3.2 模极大值的定义
定义4 若点(a0,b0)满足

则称点(a0,b0)为局部极值点,若∀t∈(t0,δ),有|WTf(a0,t)≤|WTf(a0,t0)|成立,则称点(a0,b0)为模极大值。
3.3 李氏指数(Lipschitz Exponent)
李氏指数在数学上是一种表征函数局部特征的度量,信号突变点的李氏指数决定小波变换系数模极大值的幅值随着尺度的变化规律。信号 x(t)在某一点t0的一个邻域[t0-h,t0+h]的泰勒级数是

定义5 给定信号 x(t),存在常数K>0及n=|α|阶的多项式pt0(t),使得

称 x(t)在 t0处具有李氏指数α。
函数在某一点的李氏指数表征了改点的奇异性大小。若x(t)在t0处的导数阶次越高,相应的李氏指数α越大,反应在信号的特性上x(t)在此处越平滑。若x(t)在t0处的李氏指数小于1,则信号在该点是不可微的,或是奇异的。因此,李氏指数α可作为信号在某一点,或某一区间的规则性(或奇异性)程度的一个度量。特别的,对于脉冲函数,α=-1;对于白噪声 ,α=-0.5-ε,(ε>0);对于斜坡函数,α=1;对于阶跃函数,α=0。
4 测试平台构建
4.1 硬件组成
测试平台的硬件设备主要有光纤陀螺仪一个,SMT 1三轴转台一个,三轴转台有外框、中框和内框,光纤陀螺装在内框中,计算机两台,一台控制转台转动,一台进行数据采集和存储,DH1715A-5型直流电源一台,为光纤陀螺仪提供5V直流电,采集卡1片,采集卡符合PC-104协议,数据线若干,光纤陀螺测试平台的原理框图如图1所示。三轴转台实物图如图2所示。转台控制柜如图3所示。两台计算机如图4所示,左侧计算机可控制转台在空间转动,拥有6个自由度,其控制界面如图5所示,右侧计算机进行光纤陀螺数据的采集和存储。
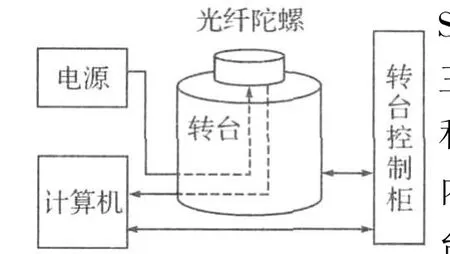
图1 光纤陀螺测试平台的原理框图

4.2 数据采集系统
光纤陀螺采用 RS232串行输出,波特率为112.5kb/s,每5ms发送一帧数据,每帧数据有8个字节。采样频率为200Hz,陀螺输出为脉冲信号。该软件可以实现光纤陀螺数据的实时采集和存储,通过PC机自带的RS232串口采集实验数据,并将结果保存到指定文件存储数据为txt文件[7]。数据采集软件界面如图6所示。

5 实验分析
本系统搭建好后,可以进行光纤陀螺的数据采集和干扰实验。光纤陀螺受干扰的信号如图7上方所示,运用小波去噪,选用db4小波进行5层分解,去噪后的信号如图7下方所示,小波可以有效地对均匀分布的白噪声信号进行滤波,但是对于局部干扰信号滤波效果不明显。小波变换的灰度图如图8上方所示,在0到50之间产生了亮暗相间的条纹,信号存在奇异性,说明干扰存在。图8下方的模极大值线更清楚地显示了这一点。可见干扰信号所在区域为第0到50采样点之间。
6 结语
通过上面的论述可以看出,小波分析消除局部干扰的效果较差,为了更有效地消除干扰的影响,小波模极大值方法能精确地检测到干扰发生的时刻和持续时间。能够有效地对光纤陀螺干扰信号进行检测。解决了局部干扰信号处理的首要问题,在此基础上,可以选择恰当的信号处理方法来分析干扰,最终消弱干扰信号对光纤陀螺的影响,从而提高全站仪的测量精度。
[1]于先文,王庆,郑子扬.具有安装误差抵偿功能的光纤陀螺/全站仪组合定向方法[J].东南大学学报(自然科学版),2008,38(4):621~625
[2]吴盘龙,张科,李言俊.多小波在光纤陀螺信号滤波中的应用研究[J].测控技术,2005,24(7):60~62
[3]袁瑞铭,孙枫,陈慧.光纤陀螺信号的小波滤波方法研究[J].哈尔滨工业大学学报,2004,36(9):1235~1238
[4]王济,胡晓.MATLAB在振动信号处理中的应用[M].北京:中国水利水电出版社,2006:78~82
[5]孙延奎.小波分析及其应用[M].北京:机械工业出版社,2005:199~216
[6]胡广书.现代信号处理教程[M].北京:清华大学出版社,2004:371~405
[7]王宇.基于FIMU的稳瞄/惯导一体化技术研究与实现[D].南京:东南大学仪器科学与工程系博士学位论文,2008
