液压万能试验机的虚拟现实仿真系统
2010-07-07杨光
杨 光
(集美大学机械工程学院,福建 厦门 361021)
在机械领域,虚拟设计的工业应用主要以产品设计为对象,实现虚拟样机、虚拟装配、动态仿真、网络交互等功能。虚拟设计可以表现产品的外观以及动态过程的仿真,如机器工作原理的虚拟表达、虚拟装配过程或虚拟操作,或者是工业过程的虚拟体现等。这些过程,均为设计人员进行合理和优化设计提供了重要的参考,代替小试甚至中试过程,同样为产品开发节约了大量的时间、人力、物力和财力[1-6]。利用虚拟现实技术创建的液压万能试验机虚拟实验环境,人与环境互相交流,可以模拟真实的试验过程,通过信息反馈,还可以从中获得有关试验的一些启示,从而熟悉整台设备结构以及试验过程。
建筑与影视作品的虚拟现实建模多依赖于3ds max和Maya,机械行业产品建模要求严格的尺寸、形状和装配关系。CAXA软件包括特征造型、曲面造型、实体造型在内的多种造型方法,同时提供了自顶向下和自底向上的装配设计方法。CAXA软件同时提供了VRML软件的数据接口。液压万能试验机的虚拟现实,首先通过CAXA软件完成工业产品造型和静态装配模型,然后结合VRML和Javascript技术,完成动态装配、试验过程的实现、试样力学性能仿真和零件信息提取等方面的内容。
1 液压万能试验机静态模型的建立
液压万能试验机静态装配模型在 CAXA软件中完成。首先,在CAXA软件中逐个建立液压万能试验机系统零件模型,包括机体、下滑块、按钮1、按钮2、按钮3、螺杆1、螺杆2和表盘等。然后,将所有零件按照组件装配,最后装配成完整的液压万能试验机。
接下来,将CAXA的ics格式的文件导出为VRML V2.0版的wrl格式文件,然后在VRML文件编辑器VrmlPad中读入wrl文件,再对此对象进行场景渲染或者动画制作等。但是,对于比较复杂的装配文件,如果将装配的ics文件作为整体导出为wrl格式,会导致在虚拟现实编辑软件中文件过大,带来对组件和零件的操作不方便等一系列麻烦。一般的处理方法是:在CAXA软件中的装配状态下,每次导出一个零件,其余零件隐藏掉,这样重复操作至导出每一个零件;然后建立一个新的wrl格式文件,利用Inline命令将所有零件的wrl文件联系起来[3],此时,不用做调整,就可以保证各个零件的相对位置的正确性,图1为部分零部件的Inline命令和转换后液压万能试验机装配体的虚拟现实模型。

图1 Inline命令和转换后的液压万能试验机虚拟现实模型
2 液压万能试验机工作过程的虚拟现实
液压万能试验机的虚拟工作过程包括机体动画设置和材料力学性能试验仿真的关键技术。
2.1 VRML动画实现
VRML通过时间传感器(TimeSensor)和插补器(Interpolator)以及路由(ROUTE)语句来实现关键动画[3]。基本过程为时间传感器给出控制动画效果的时钟,这个时钟包括动画的开始时间、停止时间、时间间隔和是否循环等参数,此时钟信息输出到插补器节点,插补器节点定义了关键点和关键数值,VRML根据插补器节点的设置进行关键点外区域的线性插值,完成匀变速动画过程。如果需要变速动画过程或者复杂动画过程,需要结合脚本语言 Javascript来实现:时间传感器的输出可以控制插补器和 Javascript的输入,而插补器和 Javascript的输出又可以控制零件的移动和旋转等动作。对于液压万能试验机,在对相应按钮设置触发传感器之后,时间传感器开始作用,此时,表盘指针指示压力的变化,两个螺杆旋转,同时,下滑块移动,实现拉伸或者压缩试样的运动。
图2为实现两个螺杆旋转和下滑块移动的动画路由,包括时间传感器、位置插补器和朝向插补器的设置。

图2 动画路由
2.2 材料力学性能试验仿真的关键技术
材料力学性能试验仿真的关键技术包括试样变形和应力应变曲线仿真等方面的内容。
2.2.1 试样变形的实现
此处以压缩塑性材料为例,试样变形通过开关节点和脚本实现,在开关节点中内联试样变形的关键状态文件。其中,脚本语句和路由语句如下:
DEF cpu Script {
eventIn SFFloat curfra
eventOut SFInt32 outCho
url "javascript:
// Handler for event curfra of type SFFloat.
function curfra (value, timestamp)
{ print(curfra);
outCho=curfra*20/2.5;
}" }
ROUTE cpu.outCho TO swit.set_whichChoice
ROUTE tims.fraction_changed TO cpu.curfra
ROUTE touch.touchTime TO tims.startTime
在浏览器中,点击按钮1后,表针开始旋转,螺杆开始旋转,下滑块下滑,下滑块的压头接触工件之后,随着压力增加,塑性材料试样经过弹性变形阶段和屈服阶段直至被压扁。
2.2.2 应力应变曲线仿真技术
液压万能试验机在仿真测试材料性能时,同时可以输出应力应变曲线,这样使得材料力学性能更加一目了然。应力应变曲线仿真技术和试样变形技术一样,通过开关节点和脚本实现。图3为塑性材料试样变形及与其对照的应力应变曲线的虚拟现实。
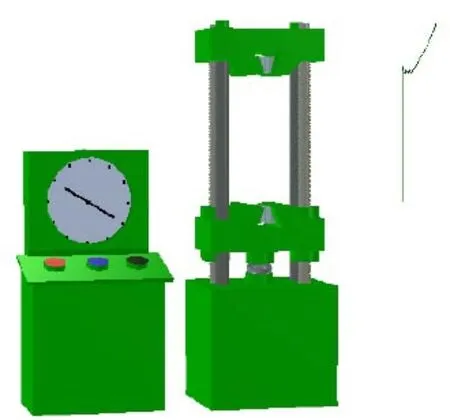
图3 试样变形及应力应变曲线
2.2.3 声音添加
VRML所播放的声音有自己的声源,它模拟现实中的3D声音传播方式,给人现实中的听觉感受。为了达到虚拟工作过程的逼真效果,具体做法是,首先录制液压万能试验机各种动作的现场声音,然后进行剪裁和分段处理,通过声音节点给 VRML世界添加合适的声音,实现过程如下:
Sound {
source DEF sou AudioClip {url "test.wav"
loop FALSE}
location 0 0 0
direction 1 0 0
maxBack 100000
maxFront 100000
minBack 1
minFront 1
intensity 1}
2.2.4 信息提取
利用VRML中的Anchor节点可以实现虚拟现实中的装配零件信息的获取[4]。比如,要想提取试样的材料信息并超链接到试样文件,具体实现语句为:
Anchor { url" shiyang1a.wrl"
description "HT200 D=2mm L=2mm "
children [DEF shiyang1a Transform {…} ]}
图4为试样材料信息的提取结果,当鼠标放在试样上时,出现“HT200 D=2mm L=2mm”字样,单击鼠标,VRML空间转换到试样文件形成的环境空间,如图5所示,在此,可以单独浏览试样零件。

图4 试样信息提取

图5 试样超链接
3 结 论
利用VRNML、Javascript技术与 CAXA的协同设计,能够很好地完成具有交互功能的万能试验机的虚拟试验过程,在不消耗实材的情况下,可以反复观察试验现象,其具体解决技术应用于工程机械的虚拟现实具有普遍意义。
[1]尹念东, 余 群. 基于桌面虚拟现实系统车辆运动仿真的立体视觉实现[J]. 农业机械学报, 2002, 33(1):23-26.
[2]倪 涛, 赵丁选, 倪 水, 等. 基于虚拟现实的遥控操作工程机器人图形仿真[J]. 农业机械学报, 2005,36(5): 80-83.
[3]王 炎. 虚拟现实建模语言 VRML[J]. 计算机科学,1999, 26(12): 38-42.
[4]张潞弟, 朱群雄. 新型虚拟现实建模交互方法[J].计算机工程, 2008, 34(1): 72-75.
[5]张翠敏, 王菁华, 董翠英. 应用OpenGL实现钢坯温度场的虚拟现实可视化[J]. 机床与液压, 2008, 36(2):157-159.
[6]高印寒, 马增治, 李春光, 等. 虚拟现实技术及其在机械工程中的应用[J]. 吉林大学学报(工学版), 2003,33(2): 105-106.
