无人机电磁弹射器系统仿真
2010-06-23刘小虎赵宏涛
刘小虎 赵宏涛 吴 峻
(国防科学技术大学机电工程与自动化学院,长沙 410073)
1 引言
电磁弹射器是一种高效的飞机起飞辅助装置,主要由直线电机、储能供电设备、电力变换设备和控制系统组成[1-2]。当用于弹射轻型飞机,如无人机时,可以在满足四部分组成的前提下将文献[1]所述的指标降低。为了检验所设计的电磁弹射系统方案能否达到弹射无人机的指标要求,需要建立系统模型进行仿真验证。仿真模型考虑地越全面,仿真结果越可信。针对直线电机这一关键组成部分,在恒定力控制目标的指导下,有必要对其进行深层次分析,将实际因素考虑到系统模型中。
在确定无人机电磁弹射器各项技术指标的基础上,本文建立了弹射器的模块化系统仿真模型,并着重分析了弹射用直线永磁无刷直流电机[3]在确保恒定力控制时需要考虑的基本模型外因素。
2 系统模型的建立与分析
以美国海军 EMALS研制任务[1]为参照,可类比得到无人机电磁弹射器的研制任务如下:
弹射本体重量:60,000kg;
弹射周期:45s;
推力波动:1.05;
一次弹射储能:4MJ;
弹射末速度:30~60m/s;末速度偏差:-0到+1.5m/s.
其中的末速度是个取值范围,对应不同的无人机型号。以上述指标为依据建立系统模型。
2.1 系统建模
在综合仿真软件 Saber环境下建立电磁弹射系统模型[4],如图 1所示。该模型由储能供电设备、电力变换设备、直线电机和控制系统四部分组成,图中用虚线框一一示出。
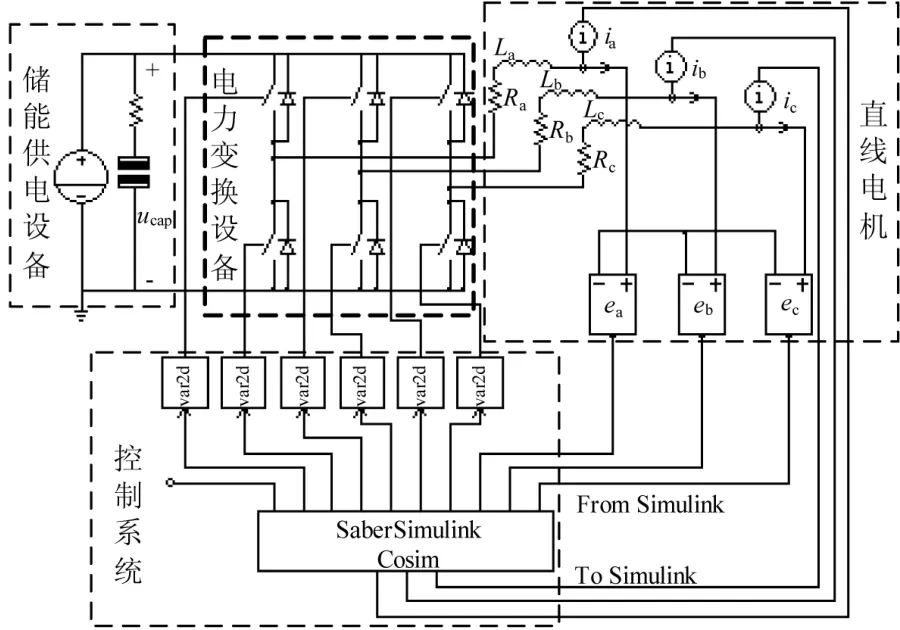
图1 电磁弹射系统模型
储能供电设备由代表蓄电池的直流电源和储能用超级电容组成。蓄电池采用大容量铅酸蓄电池,超级电容组初始电压为600V,电容值12F,这时超级电容组的内阻约为40mΩ,可以通过10kA的瞬时电流。
直线电机的设计依据是文[3]提出的动磁式双边直线永磁无刷直流电机,结构原理图如图2所示。定子加速段长50m,齿宽等于槽宽等于20mm。定子线圈分段供电。每段采用电阻R、电感L和电枢反电势e串联来建模,三相星形连接。相关参数:R=0.0184Ω,L=80uH,反电势由电机模型确定,基本模型的反电势可由有限元仿真给出,是空载反电势。动子采用的是NdFeB永磁体,外套薄铝壳,气隙2mm。极对数为2,极距为60mm。电机的深度为1m。

图2 直线永磁无刷直流电机结构原理图(顶视图)
电力变换设备就是直线电机的换相开关,是通用的三相桥,导通方式则为常见的两两导通。
控制系统利用SaberSimulinkCosim模块实现了Saber与Simulink的联合仿真。Simulink接收Saber传来的定子线圈电流信号,计算出动子的受力、速度、位置和电机反电势,并给出换相开关的控制信号,送回Saber。
被弹射无人机不妨认为是直线电机动子的一部分。动子加飞机的总质量取为M=1000kg。
2.2 模型分析
为了使无人机过载尽量小,模型的核心功能应是在加速段内将无人机匀加速至要求的末速度。因此,Simulink组成的控制系统采用的是恒定力控制方法。参考文献[5]中直流无刷电机的恒转矩控制方法,可以得到恒定力控制方法某个工作臂的输出电压Vk的表示式

式中,v是动子速度,L是相电感值,ts是采样时间,gx(x=a,b,c)是反电势形状函数。这样就得到了 Vk与力偏差(F*-F)的关系,从而可算出跟踪设定推力所需的逆变器输出电压。
采用了恒定力控制后的弹射器输出推力如图 3所示。可见平均推力基本可以维持恒定,但推力波动仍然较大,这与直线电机反电势变形密切相关。
3 实际因素对直线电机出力的影响
在确定了电磁弹射系统模型之后,如果直线电机是理想的执行机构,则运用一定的控制策略总能实现对无人机的恒加速弹射。但是,直线永磁无刷直流电机在确保安装简便、推力大的同时,也带来了反电势变形[5]、静态定位力[6,7]等很多问题,使恒加速弹射的目标遇到了困难,这些因素在深入建模的时候都必须加以考虑。

图3 弹射器输出推力
3.1 静态定位力
如图2所示的直线电机模型,一方面,定子铁芯是开槽式的,另一方面,动子永磁体是开断结构,这两个因素造成了静态定位力[6,7]。在推力要求较小的时候,比如弹射轻型无人机时,这类推力波动会严重影响弹射器输出推力的平稳性。文[7]提出通过检测位置对应的静态定位力来实施前馈补偿的办法消除这种波动,是一种用控制的方法解决问题的思路。文献[6]则直接对电机的尺寸进行优化来减小静态定位力。但是,尺寸优化在解决这个问题的同时,又带来了反电势变形的问题。
3.2 反电势变形
图4显示了双边型直线永磁无刷直流电机空载反电势波形与极宽之间的关系。
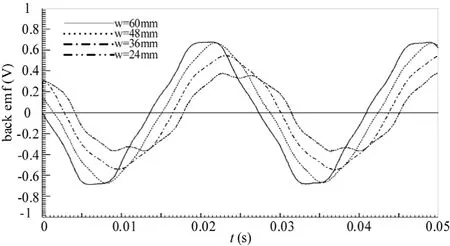
图4 反电势波形与极宽间的关系
文献[6]是通过优化极宽来削弱静态定位力的。从图4可知,极宽的改变会严重影响反电势的形状函数。据能量守恒原理,电机动子所受电磁推力F为

可见反电势变形对推力的影响是显著的。不过式(1)将已知的反电势变形考虑到了恒定力控制律中,减轻了这类影响。
但是,电机在加电运行中,由于气隙磁场的空间和时间谐波与动子运行不同步,也会使反电势发生变形。图5是动子永磁体涡流导致的反电势变形。

图5 涡流致使反电势变形
其他如电枢电流的谐波成分,换相导致的气隙磁场瞬变等因素,都会使反电势发生变形,从而影响弹射器输出推力。解决这类问题的一个办法是研究切实可行的反电势实时检测(观测)技术,将其应用于式(1)中,替代反电势形状函数。
3.3 分段过渡
一体制造长 50多米的直线电机是不现实的,也会造成能源浪费。最好的办法是采用文献[8]所说的不均匀分段法,使得从分段设计阶段就考虑了恒定力控制的结构问题。但段与段之间的“过渡”仍是个问题,因为动子从这一段过渡到下一段的过程中,电机的电感、反电势等都会出现波动,随之而来的就是力的波动。
图6则列出了另一个在分段过渡过程中容易忽略的问题,过接缝时定位力的波动。

图6 过接缝时定位力的波动
图中的波动是由一个段间 1mm的小接缝引起的,它使得静态定位力大幅增加。而要消除这样的接缝干扰,必须要求电机制造精度很高,成本随之上升。要解决这类问题,可以重新设计磁路,使磁力线对这类接缝不敏感。在电机建模的过程中,如果不考虑这些问题,就得不出符合实际的结果。
4 结论
通过对无人机电磁弹射器的系统建模,可以验证所设计方案能否满足指标要求。但是,实际的直线电机有诸多未建模因素影响弹射器输出推力特性,需要详细加以分析。这些未建模现象的影响,一般都可以通过控制或者设计的方法加以缓解甚至消除。要建立完整的无人机电磁弹射系统模型,必须将未建模项的影响和解决办法考虑进去。
[1]Doyle M R, Samuel D J, Conway T, Klimowski R R.Electromagnetic aircraft launch system—EMALS[J].IEEE Transactions on Magnetics. 1995, 31∶ 528–533.
[2]Richard R. Bushway. Electromagnetic Aircraft Launch System Development Considerations[J]. IEEE Trans.Magnetics, 2001, 37(1)∶ 52-54.
[3]罗宏浩, 吴峻, 常文森. 新型电磁弹射器的动态性能仿真[J]. 系统仿真学报, 2006, 18(8)∶ 2285-2288.
[4]赵宏涛,吴峻. 利用超级电容供电的电磁弹射器研究[J]. 微特电机, 2009, 37(2)∶1-3.
[5]S.J. Kang, S.K. Sul. Direct Torque Control of Brushless DC Motor with Nonideal Trapezoidal Back EMF[J]. IEEE TRANS. ON POWER ELECTRONICS,1995, 10(6)∶796-802.
[6]罗宏浩,吴峻,常文森.动磁式永磁无刷直流直线电机的齿槽力最小化[J].中国电机工程学报, 2007, 27(6)∶12-16.
[7]罗宏浩, 周波, 吴峻, 常文森. 永磁无刷直流直线电机齿槽力补偿控制研究[J].国防科技大学学报, 2007,29(5)∶ 117-121.
[8]Patterson D., Monti A., etc. Design and Simulation of a Permanent-Magnet Electromagnetic Aircraft Launcher[J].IEEE TRANS. ON INDUSTRY APPLICATIONS, 2005,41(2)∶ 566-575.
