基于模糊控制的双馈风力发电空载并网技术研究
2010-06-21康忠健陈天立王升花王平
康忠健,陈天立,王升花,王平
(1.中国石油大学(华东)电气工程系,山东 东营 257061;2.承德石油高等专科学校,河北 承德 067000)
1 引言
近年来,资源的短缺和环境的日趋恶化,使世界各国开始重视开发和利用可再生、无污染的新能源。风力发电是可再生能源利用的典型代表。而变速恒频系统在风力发电系统中得到广泛应用。目前变速恒频风力发电系统采用并网方式有:空载并网和负载并网。在两种并网方式中,空载并网结构简单,控制比较容易实现,也是采用比较多的并网方式。
近年来双馈发电机并网控制成为国际社会的热点,如文献[1,2]中并网控制策略采用PI控制,传统的PI控制算法有着非常好的性能,但PI算法要求系统模型参数是非时变的,应用到时变系统时,性能就会变差甚至不稳定。而模糊逻辑控制是一种新颖的控制策略,无论是在非线性还是多变量系统中,如风力发电机组控制系统,特别是当数学模型未知或不确定时,都能产生令人满意的效果,鲁棒性好,抗干扰强,如文献[3]采用全模糊控制策略,但模糊控制器本身消除系统稳态误差的性能较差,难以达到较高的控制精度,在控制点附近会出现盲区和死区。本文将模糊控制与传统PID控制结合,提高系统的鲁棒性和稳定性,提高风力发电系统运行性能。
2 双馈风力发电机模型[4]
规定定子侧电压、电流正方向取发电机惯例,转子侧电压、电流正方向取电动机惯例,采用定子磁链定向下的双馈电机数学模型为
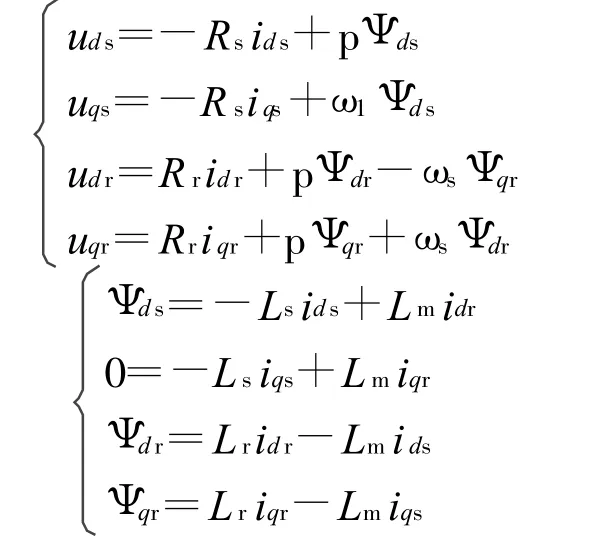
采用空载并网方式时,在并网前,定子电流为0,定子电压为被控量,控制目标是控制定子电压与电网电压幅值、频率与相位相同。在空载并网前,由于定子电流为0,所以变换到d-q坐标系下可得到两相同步旋转坐标系下的电流均为0,即ids=0,iqs=0,在忽略了定子电阻,空载时矢量控制模型可简化为
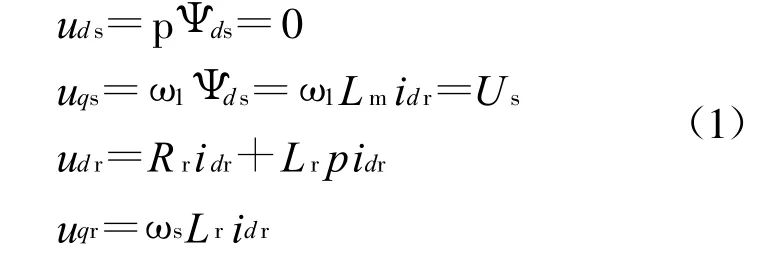
由式(1)可知,定子电压的d轴分量为0,而定子电压的q轴分量与转子电流的d轴分量成正比,控制目标定子电压幅值、频率与相位及电网电压一致,即 uqs等于相应的值,也就是控制 idr等于相应的值。
3 空载并网模糊控制器设计[5]
本文采用参数自整定模糊PI控制器。为了满足对PI控制器参数自整定的要求,利用模糊控制规则在线对PI的比例和积分进行修改。其模糊PI控制器系统框图如图1所示。
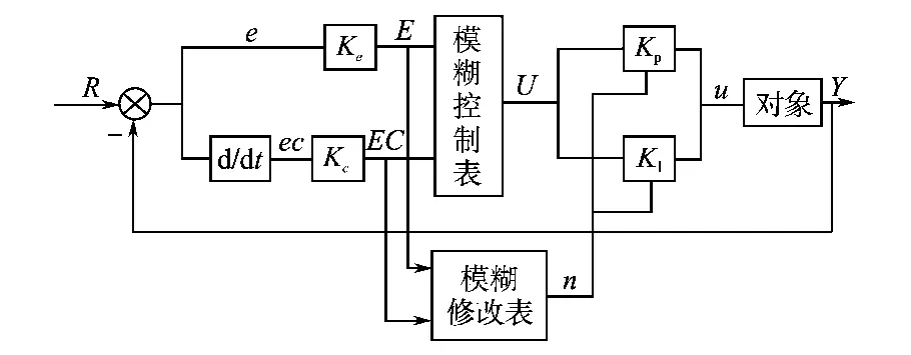
图1 参数自整定模糊PI控制器系统框图Fig.1 System diagram of the parameter self-tuning fuzzy PI controller
参数自整定的基本思想是:当偏差e或偏差变化率ec较大时,进行“粗调”,即放大Kp,KI;当偏差e或偏差变化率ec较小时,进行“细调”,即缩小Kp,KI;放大倍数的语言变量 N为下列词集:N={AB,AM,AS,OK,CS,CM,CB},这里AB,AM,AS,OK,CS,CM,CB分别表示高放,中放,低放,不变,小缩,中缩,大缩的模糊子集,N的论域规定为{0.125,0.25,0.5,1.0,2.0,4.0,8.0}。
在一控制周期内的参数自整定模糊PI控制的控制流程如图2所示。系统整体控制框图如图3所示。
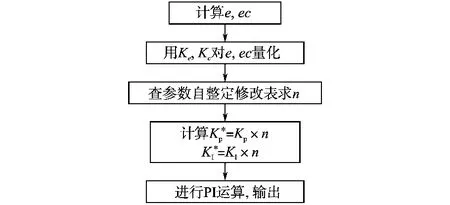
图2 参数自整定模糊PI控制器系统流程Fig.2 Control flow of parameter selftuning fuzzy PI controller
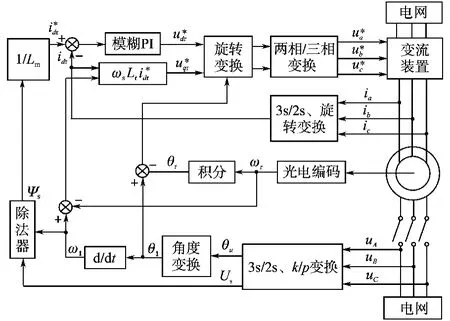
图3 系统控制框图Fig.3 System control diagram
4 仿真结果
本文采用Matlab/Simulink为平台,根据各个部分数学模型公式,建立了各部分数学模型,并进行仿真。整体系统仿真模型如图4所示。
电机参数为:额定电压380 V,额定功率1.5 kW,定子电阻 Rs=3.74 Ω,定子漏感Ls=0.304 2 H,转子电阻 Rr=3.184 Ω;转子漏感 Lr=0.310 7 H,互感Lm=0.292 0 H,极对数 pn=2,转动惯量J=0.1 kg◦m2。直流母线电压500 V。实线代表参数自整定模糊PI控制器仿真波形,虚线代表PI控制器仿真波形。
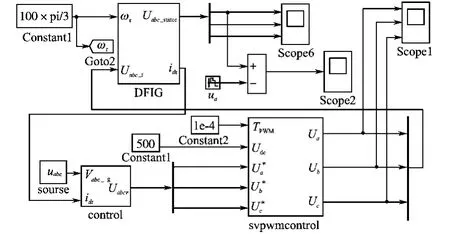
图4 空载并网系统仿真模型Fig.4 Simulation model of idle load grid-connection system
1)当转子速度(ω=100π/3)和电机参数恒定时对系统进行仿真,仿真波形如图5~图7所示。
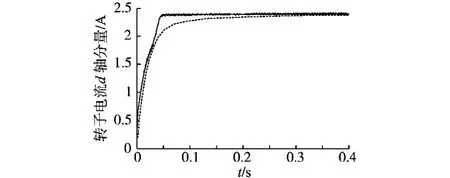
图5 idr仿真波形Fig.5 Simulation waveform of idr
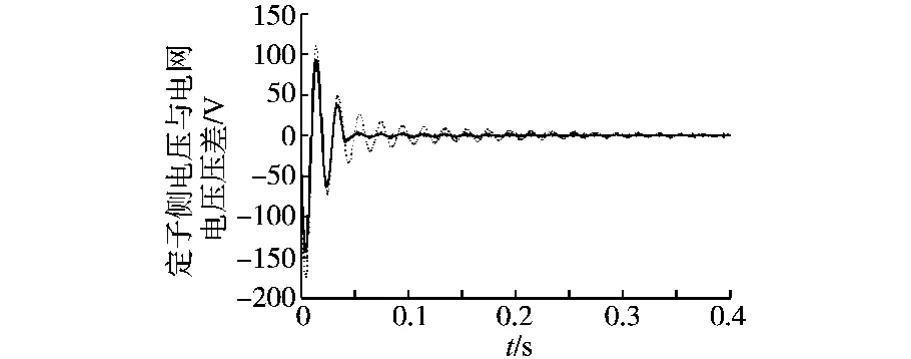
图6 定子侧电压与电网电压压差仿真波形Fig.6 Simulation waveforms of dropout voltage between stator side and g rid

图7 SVPWM仿真波形Fig.7 Simulation waveform of SVPWM
由转子速度(ω=100π/3)可以得出SVPWM的频率为1.5TN=0.03 s,由图 7中SVPWM 仿真波形可以得到验证。当转子速度和电机参数恒定时由图5和图6对比两种控制器仿真波形可以看出,模糊PI控制器的调节时间大大缩短,并且波动较小,能够更快地达到并网要求。
2)假定电机参数不变,当转子速度(在0.2 s时由 ω=100π/3变为0)变化时仿真波形如图 8~图10所示,当转子速度变化,控制SVPWM 频率相应变化从而使定子侧输出电压频率符合并网要求。由图8和图9中对比两种控制器仿真波形可以得出,模糊PI控制器的调节时间大大缩短并且波动较小,能够更快地达到并网的要求。
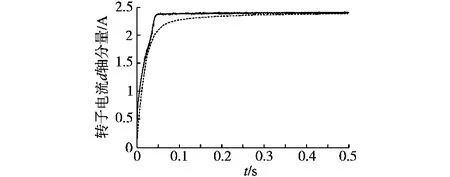
图8 idr输出仿真波形Fig.8 Simulation waveform of idr
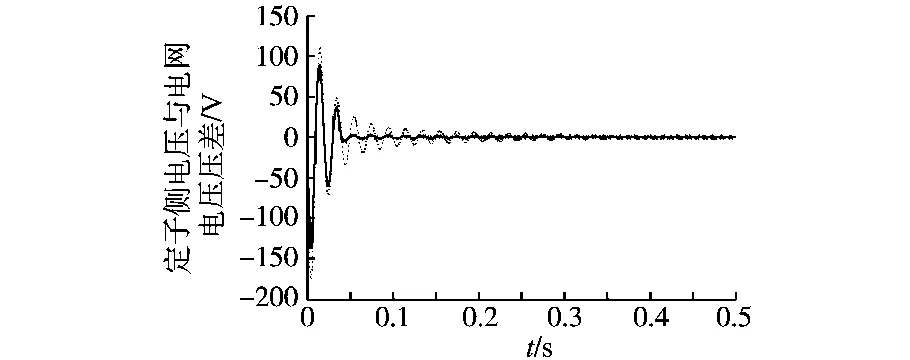
图9 定子侧电压与电网电压压差仿真波形Fig.9 Simulation waveforms of dropout voltage between stator side and g rid
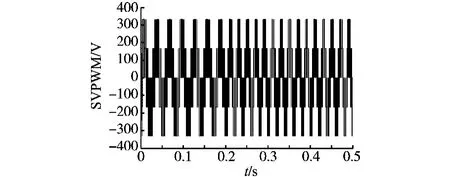
图10 SVPWM仿真波形Fig.10 Simulation waveform of SVPWM
由以上仿真波形可以得出,SVPWM频率由1.5TN=0.03 s变为TN=0.02 s,定子输出电压的幅值、频率、相位与电网电压一致,达到控制要求。
3)保证电机转速不变情况下,在0.2 s时转子电阻值增加到原来的2倍,仿真波形见图11、图12。从图11和图12仿真波形可以看出,当电机参数变化时,模糊PI控制器与PI控制器相比,调节时间大大缩短,扰动很小,具有更好的动态调节效果。
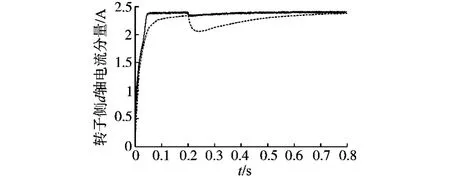
图11 id r输出仿真波形Fig.11 Simulation waveform of idr

图12 定子侧电压与电网电压压差仿真波形Fig.12 Simulation waveforms of dropout voltage between stator side and g rid
5 结论
本文对通过变速恒频风力发电系统进行分析,结合模糊控制技术,给出了基于模糊控制技术的双馈风力发电机并网控制策略。仿真结果验证了自适应模糊PI控制器与PI控制器相比,依靠模糊控制器的自调整能力能够实时在线地按照系统的偏差对控制器参数进行调整,大大减弱了对电机参数准确性的依赖程度,从而提高了控制器的自适应能力和鲁棒性。仿真结果表明,自适应模糊PI控制器能够大大提高系统的动态性能。
[1]吴国祥,马棉炜,陈国呈.双馈变速恒频风力发电空载并网控制策略[J].电工技术学报,2007,22(7):169-175.
[2]和晓新,吐尔逊◦伊不拉因,晁勤.双馈风力发电机的空载并网控制研究[J].电气传动,2008,38(6):12-15.
[3]姚骏,廖勇.基于全模糊控制器的交流励磁发电机励磁控制系统研究[J].中国电机工程学报,2007,27(33):36-41.
[4]刘其辉,贺益康,张建华.交流励磁变速恒频风力发电机的运行控制及建模仿真[J].中国电机工程学报,2006,26(5):43-50.
[5]何平,王鸿绪.模糊控制器的设计及应用[M].北京:科学出版社,1997.
[6]赵仁德,贺益康,黄科元.变速恒频双馈风力发电机交流励磁电源研究[J].电工技术学报,2004,19(6):1-6.